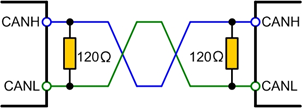
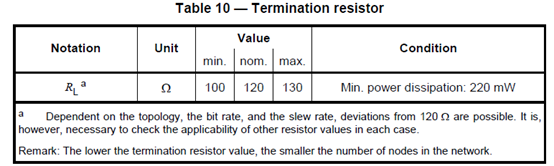
The termination resistor for the CAN bus is generally 120 ohms. In fact, during design, it consists of two 60 ohm resistors connected in series. There are typically two nodes of 120Ω on the bus, which is a well-known fact for anyone with a basic understanding of the CAN bus.However, as someone who struggles academically, I know this is a commonly used resistor value in various standards, data sheets, and application notes. But what are the specific functions of these two termination resistors? I previously only knew about impedance matching, but what exactly is being matched?So I went on Zhihu to explore and summarized the following knowledge points. Understanding the role of termination resistors can help quickly identify issues such as unstable waveforms in daily work.
Functions of Termination Resistors
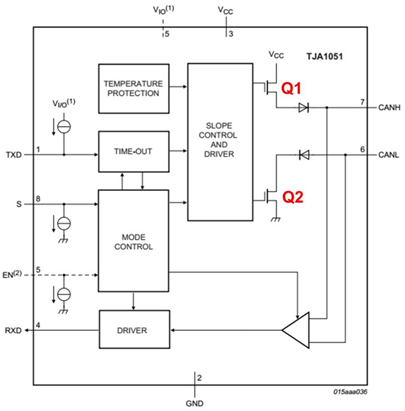
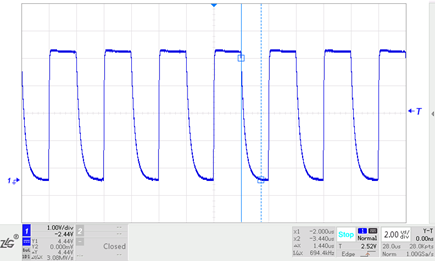
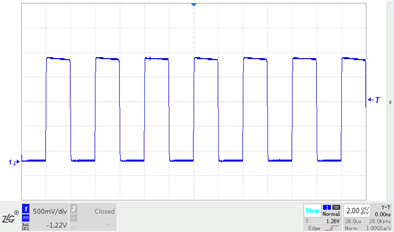
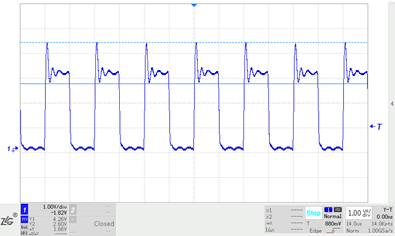
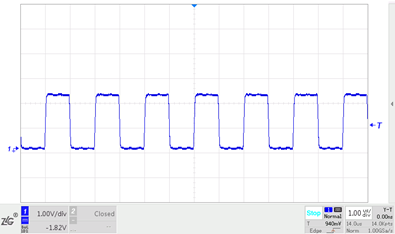
There are three functions of the CAN bus termination resistors:1. Improve anti-interference capability, allowing high-frequency low-energy signals to dissipate quickly.2. Ensure the bus quickly enters a recessive state, allowing the energy of parasitic capacitance to dissipate faster.3. Improve signal quality by placing the resistors at both ends of the bus to reduce reflected energy.1. Improve Anti-Interference CapabilityThe CAN bus has two states: “dominant” and “recessive”. The dominant state represents “0” and the recessive state represents “1”, which is determined by the CAN transceiver. The following diagram shows a typical internal structure of a CAN transceiver, where CANH and CANL connect to the bus.When the bus is dominant, transceiver internal components Q1 and Q2 conduct, creating a voltage difference between CANH and CANL. When recessive, Q1 and Q2 are off, and CANH and CANL are in a passive state with a voltage difference of 0.If the bus has no load, the differential resistance during the recessive state is very high, and the internal MOSFETs are in a high-resistance state. External interference requires minimal energy to push the bus into the dominant state (the typical minimum voltage threshold for many transceivers is only 500mV). At this time, if there is differential mode interference, there will be significant fluctuations on the bus, and these fluctuations have no place to be absorbed, creating a dominant bit on the bus. Therefore, to enhance the anti-interference capability of the bus in the recessive state, a differential load resistor can be added, with a resistance value as small as possible to minimize noise energy interference. However, to avoid requiring excessive current for the bus to enter the dominant state, the resistance value cannot be too small.2. Ensure Quick Entry to Recessive StateDuring the dominant state, the parasitic capacitance of the bus gets charged, and when returning to the recessive state, these capacitors need to discharge. If there are no resistive loads placed between CANH and CANL, the capacitors can only discharge through the internal differential resistance of the transceiver, which has a relatively high impedance. According to the characteristics of an RC filter circuit, the discharge time will be significantly longer. In our experiments, we placed a 220PF capacitor between CANH and CANL with a bit rate of 500kbit/s, and the waveform showed that the falling edge was prolonged.To ensure the parasitic capacitance of the bus discharges quickly and the bus enters the recessive state quickly, a load resistor needs to be placed between CANH and CANL. After adding a 60Ω resistor, the waveform showed that the time for the dominant state to return to the recessive state was reduced to 128nS, which is comparable to the time taken to establish dominance.3. Improve Signal QualityAt higher transition rates, when signal edge energy encounters impedance mismatches, signal reflections occur. Changes in the geometric structure of the transmission line cable can also cause variations in characteristic impedance, leading to reflections.When energy reflects, the reflected waveform superimposes on the original waveform, causing ringing.At the end of the bus cable, abrupt changes in impedance lead to signal edge energy reflections, causing ringing on the bus signal. If the ringing amplitude is too large, it can affect communication quality. Adding a termination resistor at the end of the cable that matches the cable’s characteristic impedance can absorb this energy and prevent ringing from occurring.In one simulation experiment (all images are copied from others), with a bit rate of 1Mbit/s, the transceiver connected to a 10m twisted pair cable and a 120Ω resistor at the transceiver end to ensure recessive transition time, and no load at the end. The end signal waveform showed ringing on the rising edge.If a 120Ω resistor is added at the end of the twisted pair, the end signal waveform improves significantly, and the ringing disappears.In a linear topology, the ends of the cable serve as both the transmitter and receiver, so termination resistors need to be added at both ends of the cable.However, in actual applications, the CAN bus is often not perfectly designed as a bus; many times it is a hybrid structure of bus and star topologies. In these cases, the CAN termination resistors are typically placed at the two farthest ends of the harness to best simulate the standard structure of the CAN bus.
Why Choose 120Ω?
What is impedance? In electrical terms, impedance refers to the opposition to current in a circuit. The unit of impedance is ohms, commonly represented as Z, which is a complex number Z = R + i(ωL – 1/(ωC)). Specifically, impedance can be divided into two parts: resistance (real part) and reactance (imaginary part). Reactance includes capacitive reactance and inductive reactance, where capacitive reactance refers to the opposition to current caused by capacitance, and inductive reactance refers to the opposition caused by inductance. The impedance here refers to the modulus of Z.The characteristic impedance of any cable can be derived experimentally. One end of the cable is connected to a square wave generator, and the other end is connected to a variable resistor, while observing the waveform across the resistor with an oscilloscope. The resistance value is adjusted until the signal across the resistor is a good, non-ringing square wave; at this point, the resistance value can be considered consistent with the cable’s characteristic impedance.Using two typical automotive cables twisted into a twisted pair, the characteristic impedance can be found to be approximately 120Ω using the aforementioned method, which is also the recommended termination resistor value by the CAN standard. Therefore, this 120Ω is measured, not calculated, and is derived from the actual characteristics of the harness. Of course, this is also defined in the ISO 11898-2 standard.
Why Choose 0.25W Power Rating?
This must also consider some fault conditions, as all interfaces of the automotive ECU need to account for short circuits to power and ground. Therefore, we also need to consider the situation where the CAN bus node shorts to power.According to the standard, we need to consider a short circuit to 18V. Assuming CANH shorts to 18V, the current will flow through the termination resistor to CANL, and due to current limiting, the maximum injected current is 50mA (as specified in the TJA1145 datasheet).At this point, the power of the 120Ω resistor is 50mA * 50mA * 120Ω = 0.3W.Considering derating at high temperatures, the power rating for the termination resistor is 0.5W.