Definition of LIN Bus
LIN (Local Interconnect Network) is a low-cost serial communication network defined for automotive distributed electronic systems.
The main function of LIN is to provide auxiliary functions for CAN bus networks, and it is used in places like body electronic components (such as windows, mirrors, headlights, wipers, etc.).
It is suitable for applications that do not have high requirements for network bandwidth, performance, or fault tolerance. Based on the SCI (UART) data format, it adopts a single master controller/multiple slave devices model, which is a special case of UART.
Characteristics of LIN Bus
(1) The LIN bus uses a single-wire transmission form, with a bus level generally at 12V, and a maximum transmission rate limited to 20kbps. Due to physical layer limitations, a LIN network can connect up to 16 nodes without arbitration.
(2) The hardware requirements are simple, only requiring a UART/SCI interface, along with a simple driver program to implement the LIN protocol.
(3) One major advantage of LIN is its low cost, with a maximum transmission rate of 20Kbps. The recommended communication rates are as follows: low speed 2400bps, medium speed 9600bps, high speed 19200bps. (bps stands for bits per second)
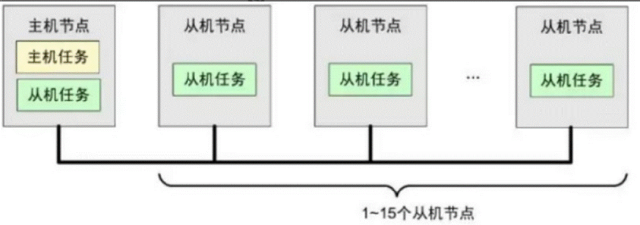
Network Topology of LIN
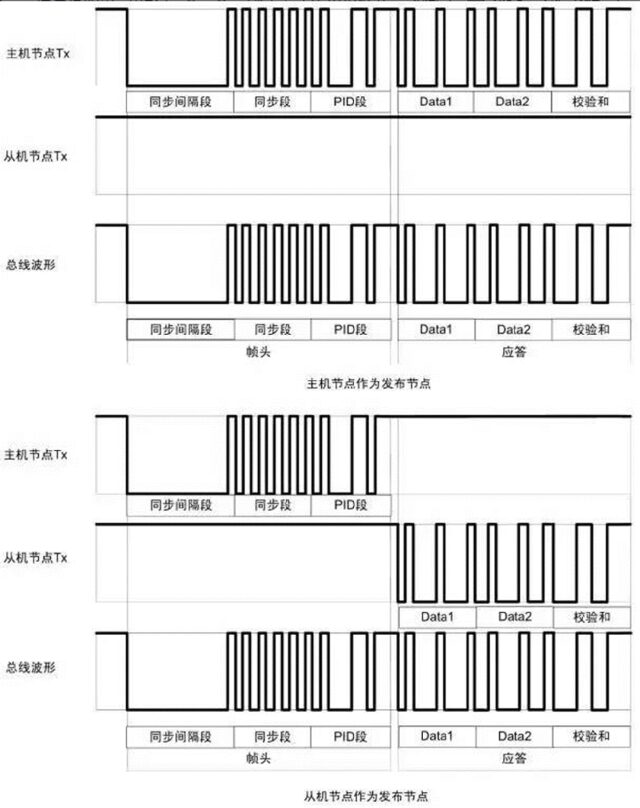
(1) Single master task, multiple slave tasks;
(2) The master node contains both master tasks and slave tasks;
(3) The slave nodes only contain slave tasks;
(4) The master task determines the messages on the bus, while slave tasks send data;
(5) All nodes in the LIN network (including master nodes) have slave tasks, and when they receive message information from the master task, one of them must respond to the message.
LIN Levels
(1) The LIN bus has two complementary logic levels: ‘dominant’ and ‘recessive’. The dominant level (reference ground voltage) is logic 0, while the recessive level (supply voltage) is logic 1.
(2) The transmission and reception of dominant and recessive levels are ensured by a pre-set voltage difference range to guarantee data transmission stability.
(3) The voltage for sending a signal must satisfy the condition that the recessive level > Vbat 80%, and the voltage for sending a signal must satisfy that the dominant level < Vbat 20%.
(4) The voltage for receiving a signal must satisfy that the recessive level > Vbat 60%, and the voltage for sending a signal must satisfy that the dominant level < Vbat 40%.
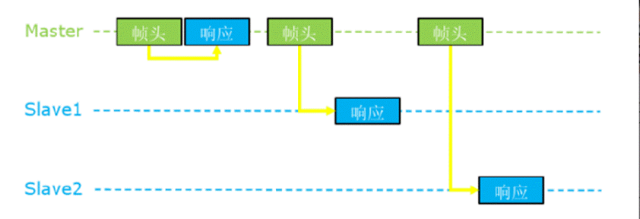
Frame Structure of LIN
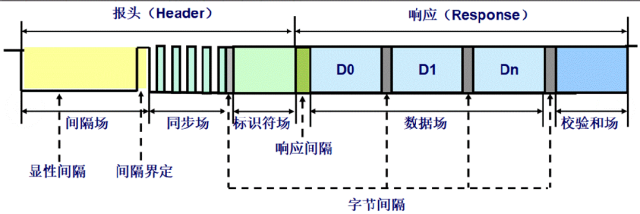
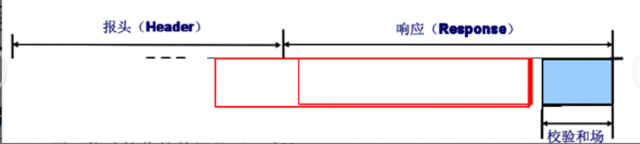
A frame in the LIN bus mainly consists of two parts: the message header (Header) and the message response (Response).
The message header is sent by a master node’s master task, while the message response (hereinafter referred to as response) is sent by either a master node or a slave node’s slave task.
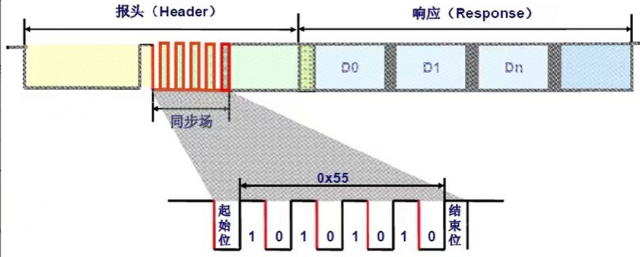
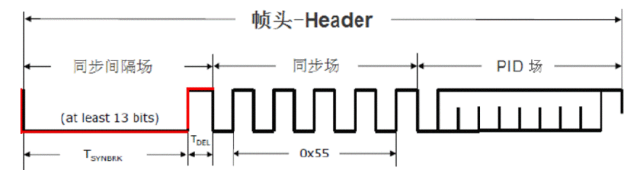
The message header consists of a synchronization interval field (minimum 13 dominant bits), a synchronization field (1 byte: 0x55), and a PID field (1 byte); the response consists of 1-8 bytes of data field and a checksum field (1 byte).
There is a frame internal space separator between the message header and the response, with a minimum space of 0, totaling 11 bytes.
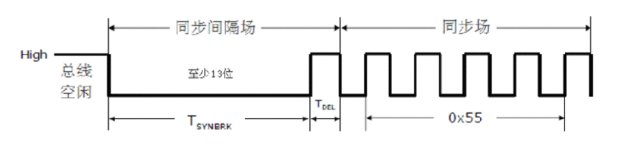
Synchronization Interval Segment
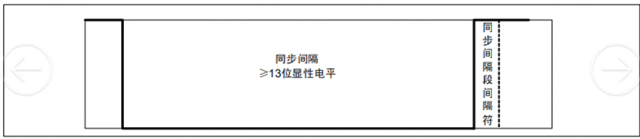
The synchronization interval segment consists of a synchronization interval (Break) and a synchronization interval delimiter (Break Delimiter):
1. The synchronization interval lasts at least 13 dominant bits; the synchronization interval segment is a marker for the start of a frame, sent by the master node;
2. The synchronization interval delimiter lasts at least 1 recessive bit.
3. The synchronization interval field is the only field that does not conform to the UART format.
4. A slave node needs to detect at least 11 consecutive dominant bits to consider it a separation signal.
Synchronization Segment
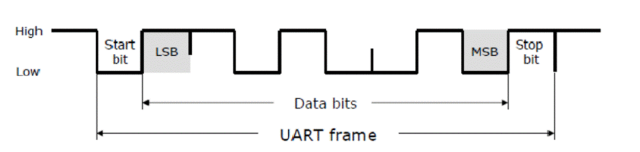
1. The synchronization segment consists of 1 start bit (dominant) + 8 data bits + 1 stop bit (recessive).
2. In a LIN frame, data transmission first sends LSB (least significant bit), and finally sends MSB (Most Significant Bit);
3. LIN synchronization uses falling edge bits as indicators, using byte 0x55 (binary 01010101b), ensuring all slave nodes use the same baud rate as the master node to send and receive data.
Protected Segment (PID)
The first 6 bits of the protected ID segment are called Frame ID, and after adding two parity bits, it is called Protected ID.
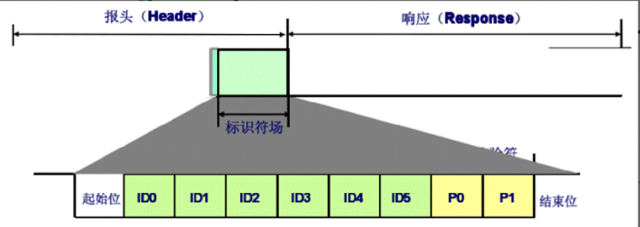
Protocols LIN 2.0 and above use PID.
The Frame ID range is between 0x00~0x3F, totaling 64 (ID:60-61 for diagnostic ID, ID:62-63 reserved), with the parity bit verification formula as follows:
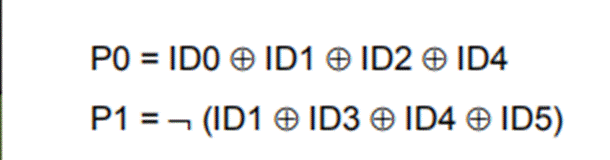
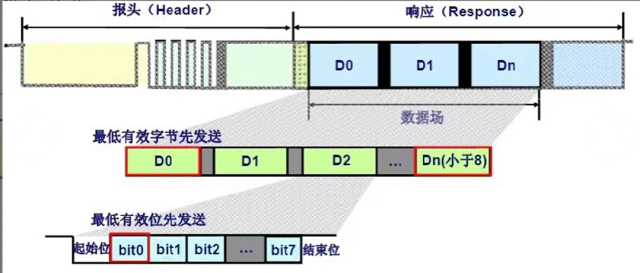
Data Segment
The data field length is 1 to 8 bytes;
Low byte is sent first, low bit is sent first;
If a signal length exceeds 1 byte, it is sent in low bit first mode (little-endian).
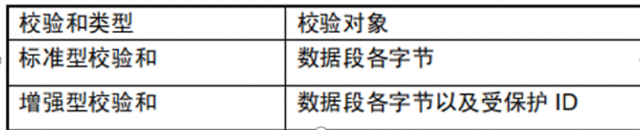
Checksum Segment
The checksum segment is used to verify the contents transmitted in the frame. Checksums are divided into standard checksums and enhanced checksums.
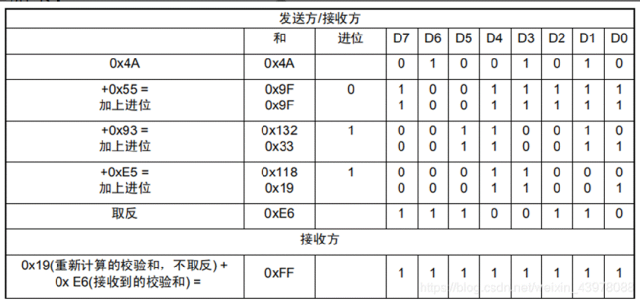
For example: using a standard checksum, Data1 = 0x4A, Data2 = 0x55, Data3 = 0x93, Data4 = 0xE5, the calculation method is as follows:
LIN Bus Waveform
LIN Scheduling Table
(1) The scheduling table is responsible for scheduling the order of frame transmissions in the network:
Assigning sending gaps for each frame;
Sending gap: the time a frame can be sent;
The sending gaps for different frames may vary.
(2) The scheduling table is determined during the network system design phase, specified in the LDF file.
(3) The master task can have multiple scheduling tables and switch between different schedules.
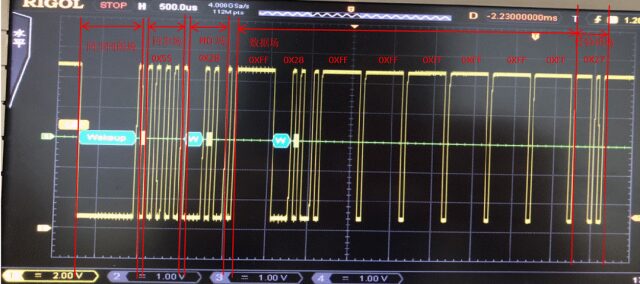
Parsing LIN
Send PID:0X28 Data (0-7): 0xFF 0x28 0xFF 0xFF 0xFF 0xFF 0xFF 0xFF
The oscilloscope parses the LIN data:
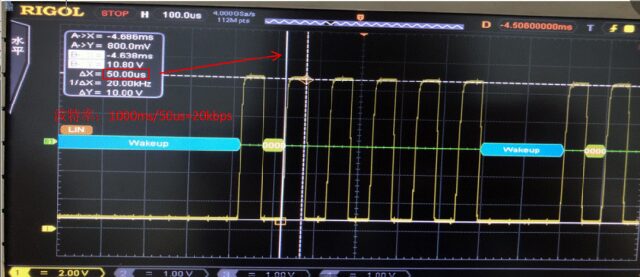
The oscilloscope parses the LIN sending cycle:

The oscilloscope parses the LIN sending baud rate (19200bps):
Data Size Transmission Modes
Little-endian mode is also known as Intel format.
Big-endian mode is also known as Motorola format.
From the figure, each row represents one byte of 8 bits, from right to left are bit0, bit1…bit7. There are a total of 8 rows, from top to bottom are byte0, byte1…byte7, totaling 64 bits (bit order from byte0 to byte7 increases sequentially).
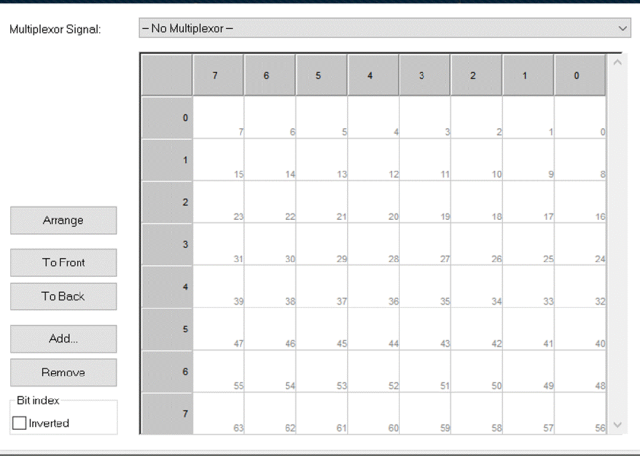
Whether using Motorola or Intel format, the only difference arises when parsing a single signal across bytes.
LIN Node Synchronization Mechanism
Hard Synchronization
LIN nodes are unsynchronized before communication;
To reduce costs, slave nodes generally do not use crystal oscillators but rather RC oscillators;
Single-wire transmission also does not use a clock line;
When there is no data transmission, the bus remains in a recessive state;
To ensure data consistency, synchronization must occur before effective data transmission.
Synchronization interval field:
Synchronization field:
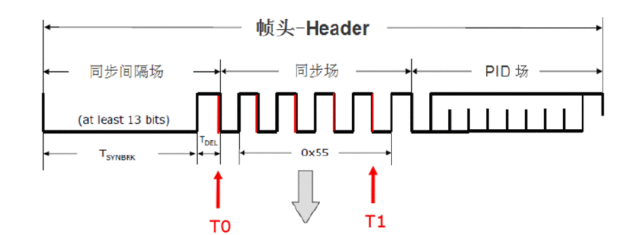
A byte, with a fixed structure: 0x55, used for synchronization; detecting 5 falling edges: Tbit=(T1-T0)/8
Resynchronization
Uses asynchronous transmission methods.
Based on UART/SCI communication format, sending one byte requires 10 bit times (Tbit).