Bionic robots have always been a research hotspot, and recently scientists have turned their attention to insect bionic design. If a robot can be invented based on the tiny brain structure of insects, capable of moving freely under complex conditions, it could not only perform directional actions but also possess strong navigation and survival abilities like insects. This would enable them to undertake many technically demanding tasks, providing significant convenience to human life.
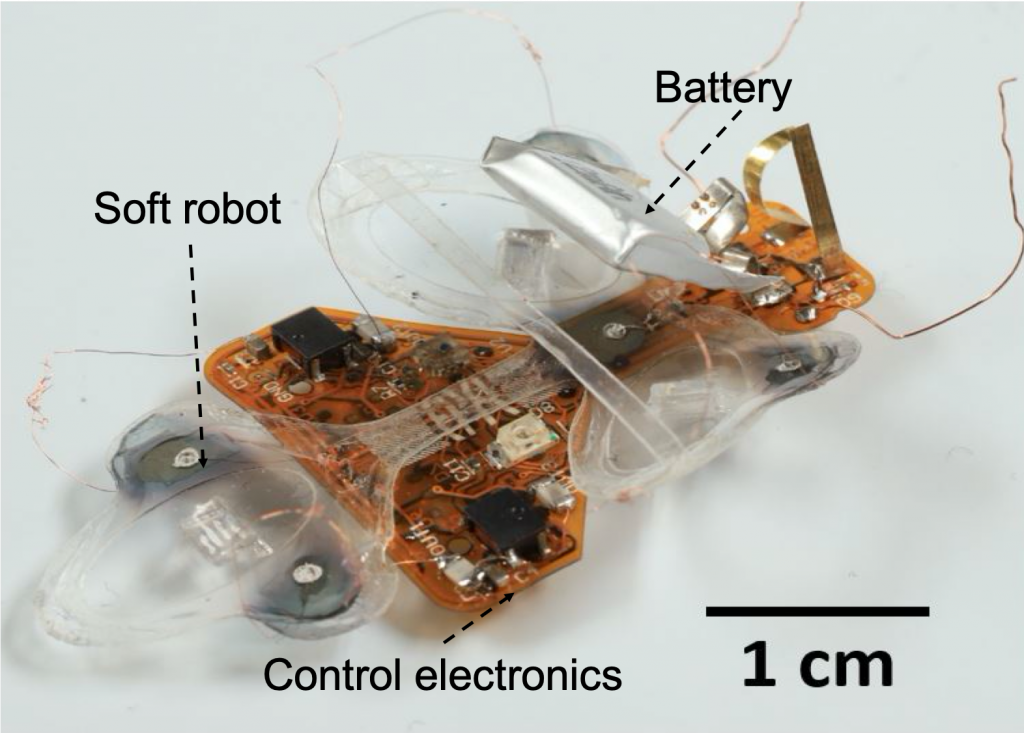
The DEAnsect is a bionic insect robot developed collaboratively by EPFL-LMTS (Soft Sensor Laboratory), EPFL-LAI (Integrated Actuator Laboratory), and the LPPI of the European Academy. It integrates motion, intelligence, and operational efficiency.

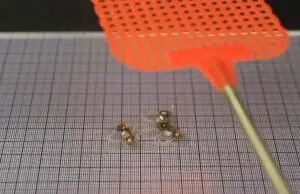
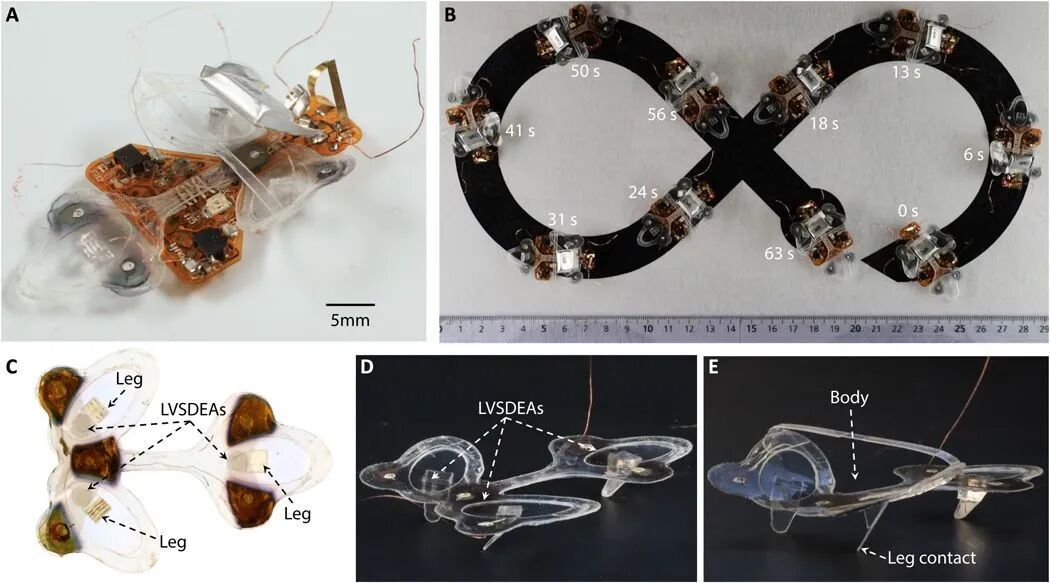
Weighing less than 1 gram and measuring only 4 centimeters in length, it can move rapidly at a speed of 3 centimeters per second. Even under the harsh impact of a fly swatter, the DEAnsect remains unharmed and continues to move normally.
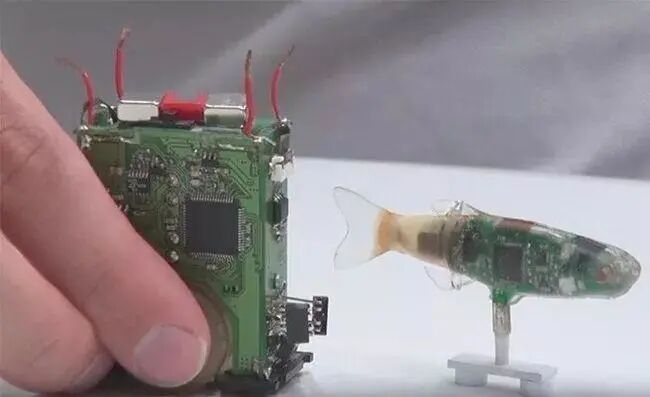
The DEAnsect comes in two versions: one requires a wired connection to a power source, while the other is wirelessly connected and can navigate autonomously based on its environment.
Upon close observation of the DEAnsect, one can see that this small robot has a relatively flat body, featuring a metallic body and transparent wings, while the entire structure is very flexible.

The DEAnsect is made of soft artificial muscles, allowing it to be twisted, bent, and compressed without damage.
By attaching miniature optical sensors to the DEAnsect, it can sense light intensity and move along a black line, ensuring that it does not lose direction on a white surface.
The invention of the DEAnsect marks a new milestone for bionic insect robots, which are fully autonomous, unbound, and capable of interacting with their environment.

How does the DEAnsect move?
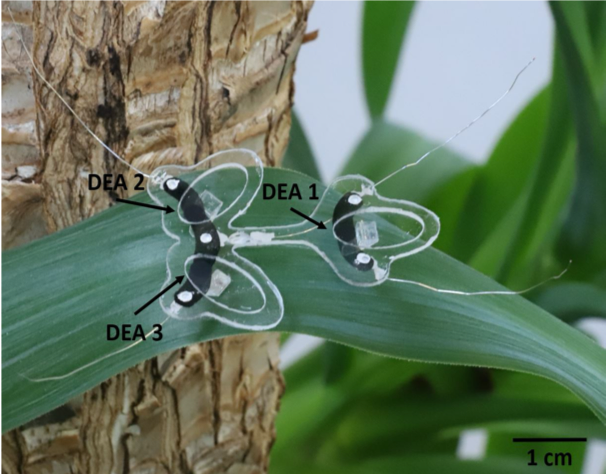
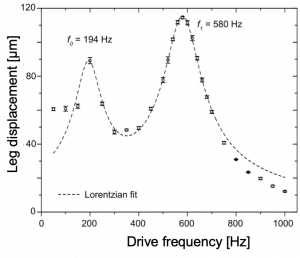
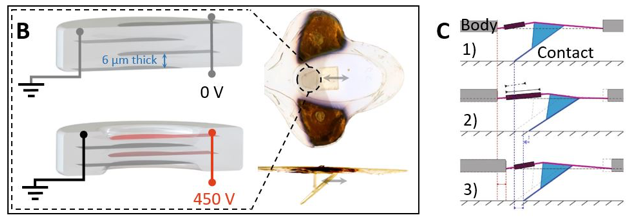
The DEAnsect has three legs: a front leg, a left leg, and a right leg. Each leg is made of an artificial muscle (also a low-pressure dielectric elastomer actuator) that can push forward or backward 450 times per second, a speed that is too fast to be seen by the naked eye.
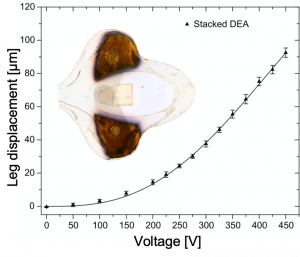
The DEAnsect moves using its three small legs. When current is applied, the shape of the actuator on the leg changes, pushing the leg forward, allowing each leg to move slightly forward, thus propelling the DEAnsect.
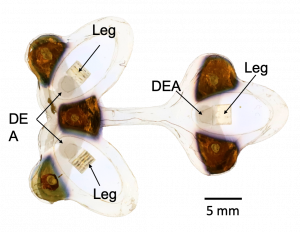
The DEAnsect takes steps of about 20 micrometers. Although the steps are small, it can take 450 steps per second, resulting in a fast movement speed.

The DEAnsect can operate on various terrains, easily climbing slopes and walking smoothly on uneven surfaces.

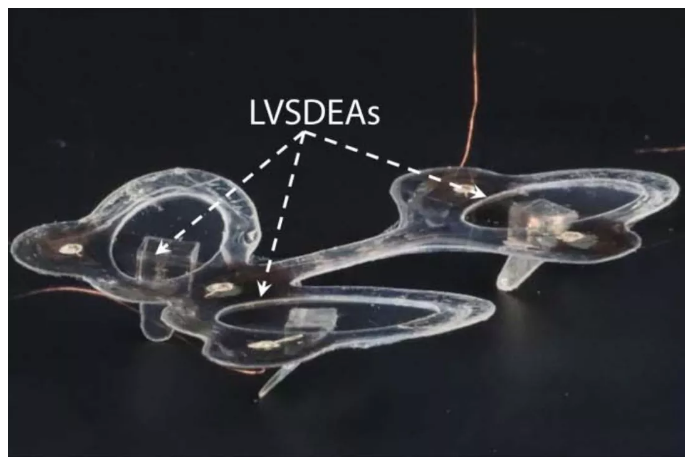
Low Voltage DEAs
To create this autonomous robot, EPFL developed a high power density dielectric elastomer actuator (abbreviated as DEAs, a type of electrostatic artificial muscle).
The newly developed DEAs operate at a lower driving voltage than conventional DEAs. Lowering the voltage allows the overall control system of the DEAs to be miniaturized and lightweight, enabling integration into soft robots.
The low-voltage DEAs consist of a 6μm thick silicone layer and ultra-thin electrodes. When voltage is applied, charge separation occurs, creating electrostatic pressure on the membrane, causing the electrodes to attract each other, deforming the film, increasing its area and reducing its thickness.
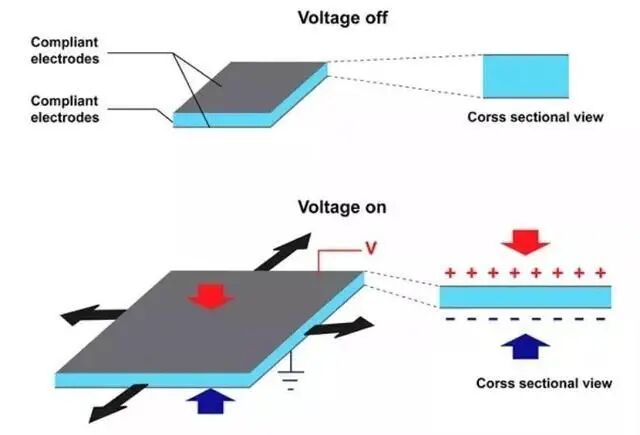
To limit the reinforcing effect of the DEA electrodes on its film structure, the DEA electrodes need to be very thin and soft. The electrodes must also have sufficient conductivity for rapid operation.
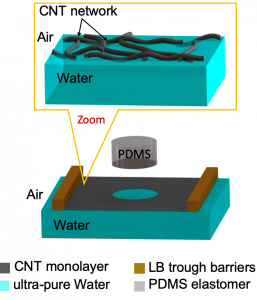
However, thin and soft electrodes typically have weak conductivity. Therefore, EPFL used the Langmuir-Schaefer method to create a two-dimensional assembly of SWCNTs, achieving sufficiently strong conductive stretchable electrodes, allowing the DEAnsect’s low-voltage DEAs to operate below 500 Hertz.
The DEAnsect can also withstand impacts, such as heavy blows similar to those from a fly swatter. After being struck, the DEAnsect may be flattened and stuck to the floor, but once picked up, it continues to move quickly without any delay, thanks to its sufficiently robust shell design.

Why did EPFL develop this robotic insect?
Humans have always had a strong interest in studying insects. Insects move very quickly and can adjust their state according to the environment due to their smooth bodies. They can survive significant impacts, such as falling from heights or crashing into walls at full speed, and can squeeze into narrow spaces.

EPFL aims to create a soft robot that can move quickly like an insect, is robust enough, and can carry its own power supply and control devices. Unlike the DEAnsect, almost all current soft robots are tethered to a compressor or power source.
EPFL’s goal is to demonstrate that when artificial muscles are combined with suitable low-voltage electronic devices, autonomous walking robots can be achieved.
How does the DEAnsect differ from previously developed robotic insects?
Most robotic insects developed to date have hard shells and motors, while the DEAnsect is the first unbound robotic insect driven by soft artificial muscles. This allows the DEAnsect to physically interact with its environment or other robots without sustaining damage.
Researchers have stated that they will create a population of DEAnsects to simulate the collective intelligence behavior of insect populations, further executing multifunctional tasks such as disaster rescue and studying insect habits in natural habitats.
The DEAnsect integrates sensors, controllers, batteries, etc., achieving autonomous intelligent cruising. Although the DEAnsect cannot perform many substantial tasks yet, it is still a commendable achievement, perfectly showcasing some interesting development directions in the field of soft robotics.