Small magnetic soft-bodied robots can be designed for different modes of movement, enabling navigation and operation in unstructured, confined, and dynamic environments. These soft micro-robots can be used in medical applications, where the robot’s task is to move within the human body.
Recently, Ziyu Ren & Metin Sitti from the Max Planck Institute for Intelligent Systems in Germany published a paper in Nature Protocols, detailing the entire process of developing small magnetic soft-bodied micro-robots with multimodal locomotion capabilities, including robot design, material preparation, robot manufacturing, motion control, and motion optimization.
They also provided a detailed introduction to a sheet-like soft-bodied robot that has 12 different modes of movement and can traverse various terrains. In liquids, it can control a jellyfish-inspired soft robot through various swimming modes, adjusting body stiffness at different swimming speeds to achieve efficient propulsion of a zebrafish larva-inspired soft robot, as well as a dual-stimulus responsive sheet-like soft robot design, manufacturing, and control that can automatically switch movement modes in response to environmental temperature changes.
The body of the magnetic micro-robot can be made from hard magnetic materials or soft magnetic materials. High-quality magnetic materials are crucial for the development of these robots. For those interested in learning more about magnetic materials, you can visit the Shanghai Guangda International Hotel from March 5-7 for the 2024 China Magnetic Materials Development and Carbon Peak Carbon Neutrality Forum.
The forum will focus on the research and development of new magnetic materials in China during the low-carbon economy era, application and market development, industry trends, new processes, new products, manufacturing technologies, production management, and technological innovation, inviting top experts and scholars in the field of magnetic materials to discuss the future development directions and bottlenecks of the industry, contributing to the development of China’s magnetic materials industry under the context of carbon peak and carbon neutrality.
Scan the QR code in the image to register for the conference!
This experimental process is aimed at users with basic professional knowledge in soft robot development. The experimental procedures can be completed in a few days to a few weeks, depending on the desired feature level.
 Design and build of small-scale magnetic soft-bodied robots with multimodal locomotion.
Design and manufacture of small magnetic soft-bodied robots with multimodal movement capabilities.
Design and build of small-scale magnetic soft-bodied robots with multimodal locomotion.
Design and manufacture of small magnetic soft-bodied robots with multimodal movement capabilities.
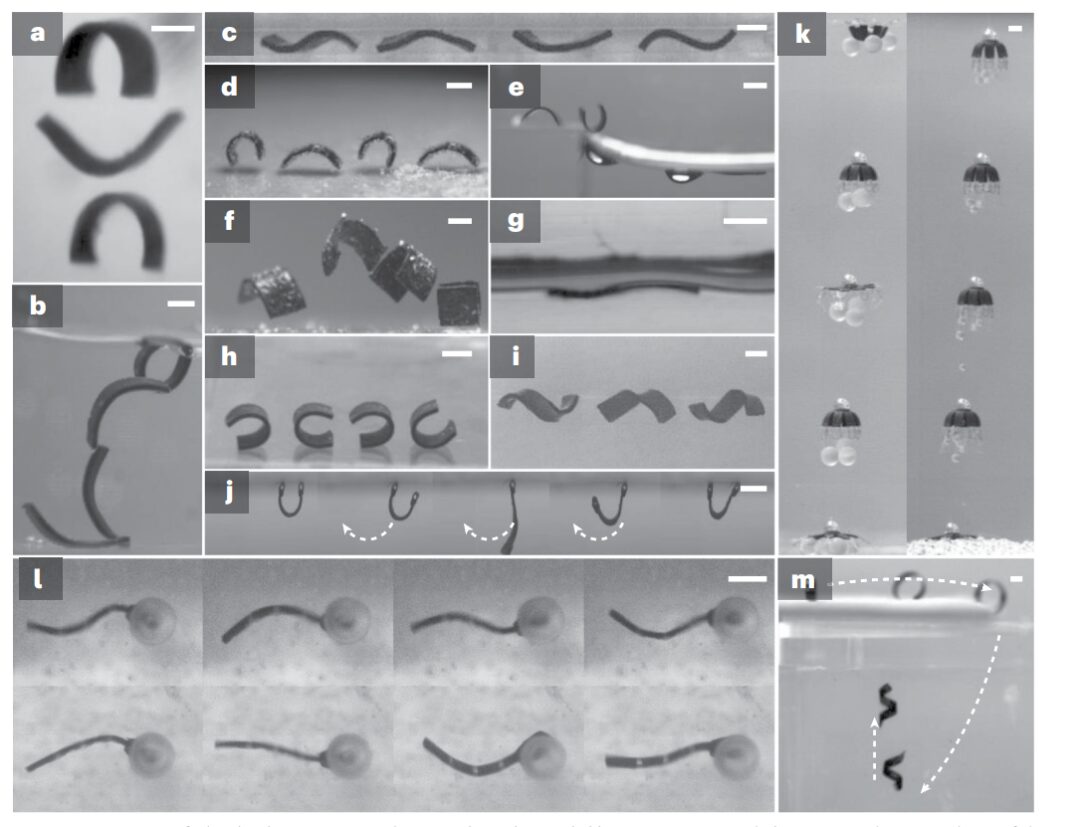
Figure 1: Magnetic soft-bodied micro-robots with multimodal movement capabilities.
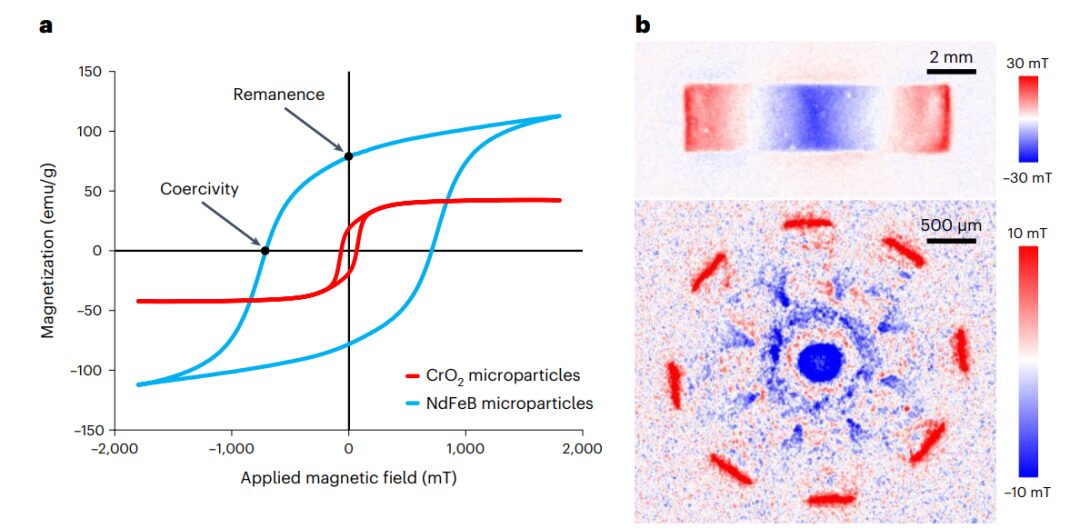
Figure 2: Example results of magnetic material characterization.
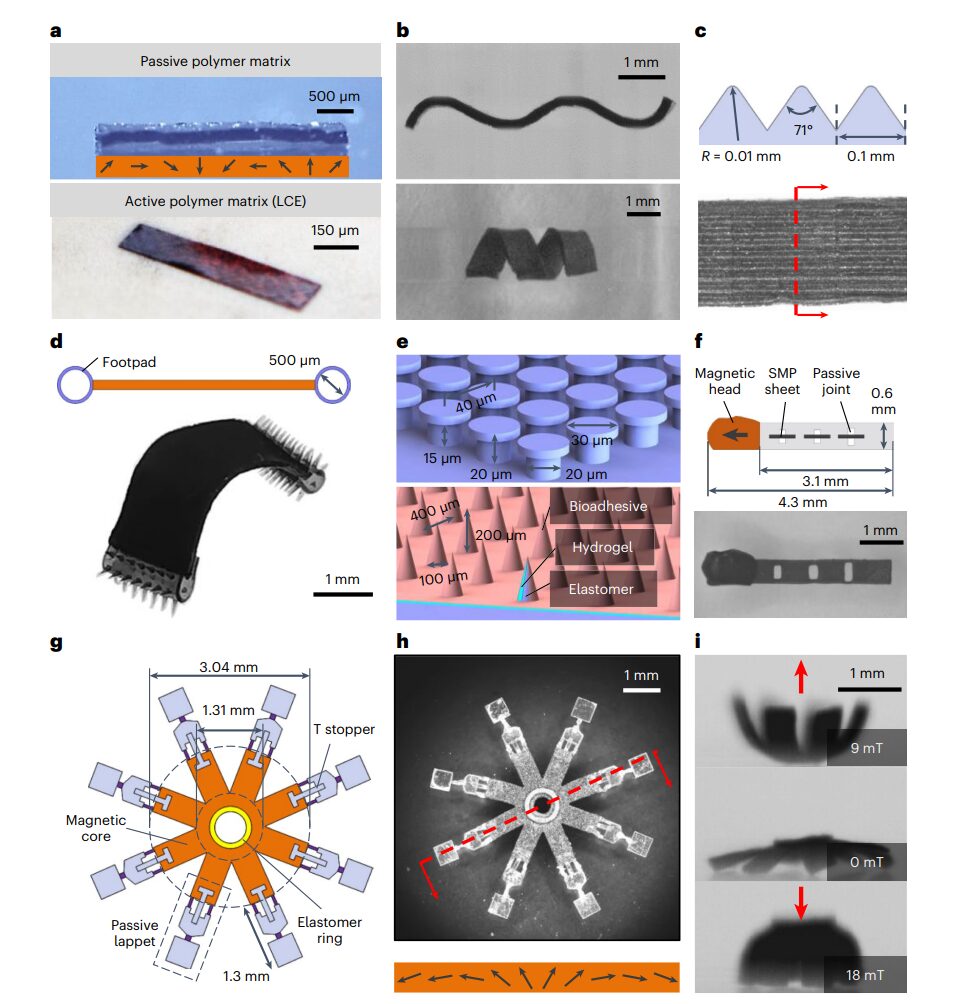
Figure 3: Design of magnetic soft-bodied micro-robots with multimodal movement.
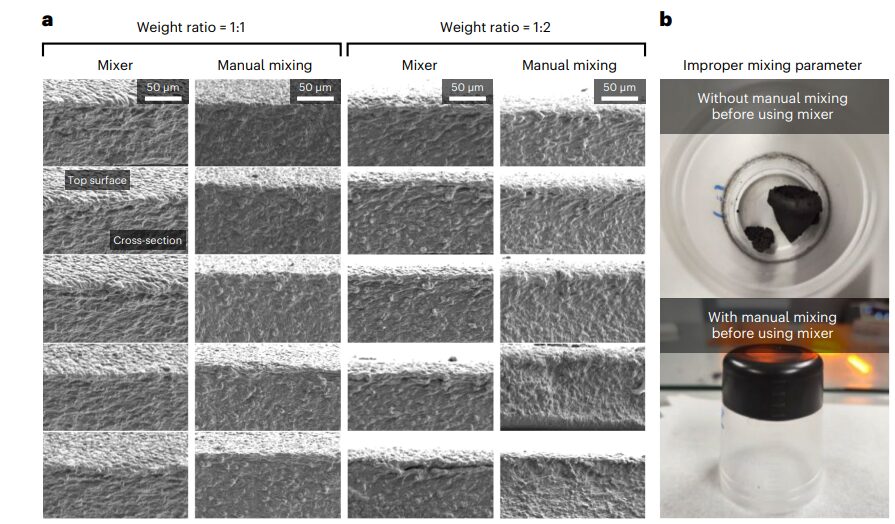
Figure 4: Distribution of magnetic particles in a polymer matrix.
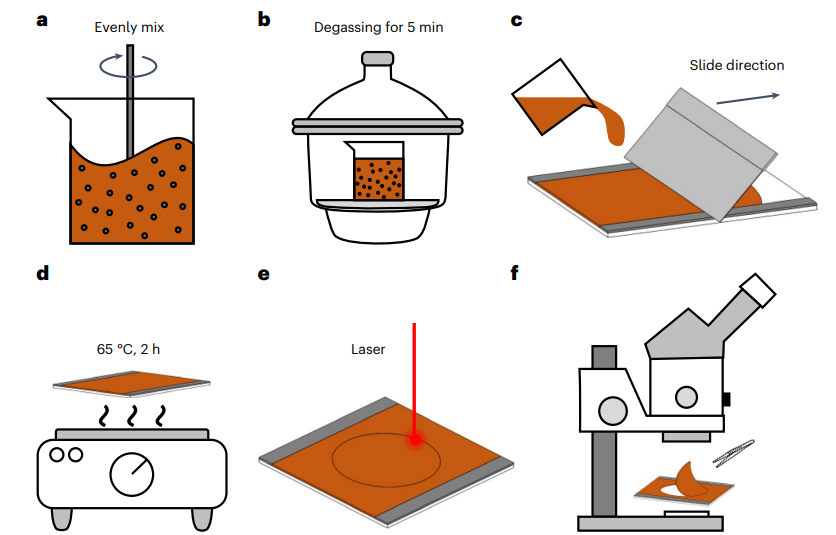
Figure 5: Preparation process of magnetic soft composite films.
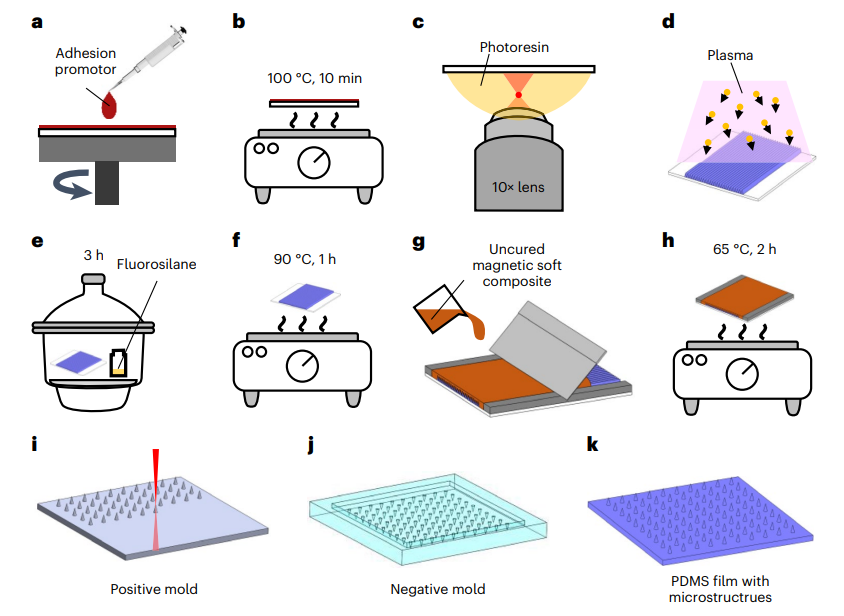
Figure 6: Preparation process of magnetic soft composite films with microstructures.
Key Points
1. This experimental protocol describes a sheet-like micro-robot with 12 modes of movement for traversing different terrains; a jellyfish-inspired micro-robot for manipulating objects in liquids; a zebrafish-inspired micro-robot for efficient swimming; and a dual-stimulus responsive micro-robot that can automatically switch movement modes in response to environmental temperature.
2. Rigid robots lack the ability to deform, limiting their specific functions, while soft micro-robots exhibit complex movement strategies similar to those employed by small organisms.
Ren, Z., Sitti, M. Design and build of small-scale magnetic soft-bodied robots with multimodal locomotion. Nat Protoc (2023).
https://doi.org/10.1038/s41596-023-00916-6
https://www.nature.com/articles/s41596-023-00916-6
This article is translated from Nature.
Statement: The content of this article comes from Today’s New Materials. For sharing only, it does not represent the position of this account. If there is any infringement, please contact the editor for deletion, thank you!