
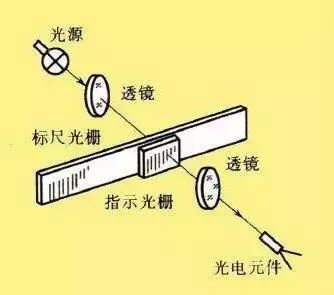
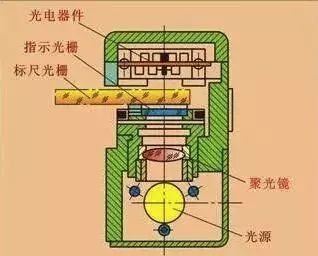
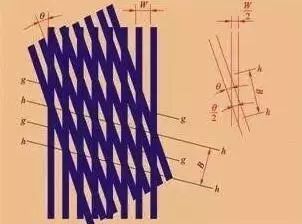
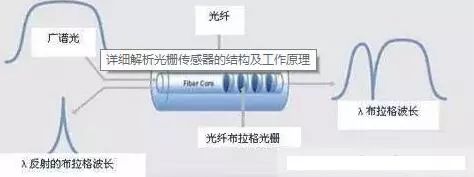
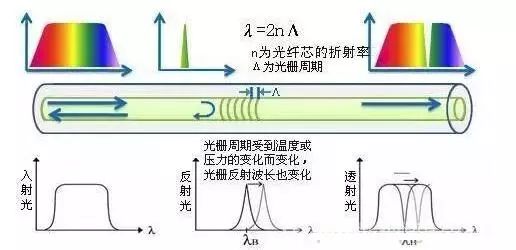
Grating Sensors

Infrared Sensors
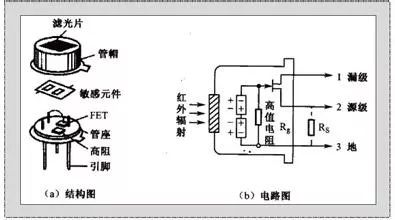
Pyroelectric Infrared Sensors

Fiber Optic Gyroscope Sensors

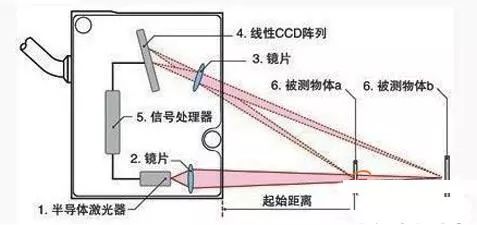
Laser Displacement Sensors
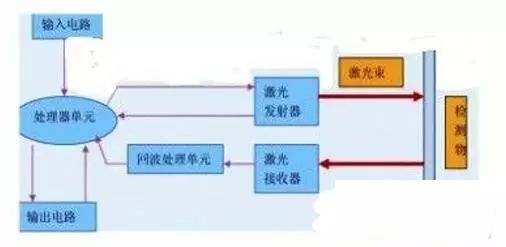
Laser Ranging Sensors
0.001m(3X10^8m/s)=3ps

Grating Sensors
Infrared Sensors
Pyroelectric Infrared Sensors
Fiber Optic Gyroscope Sensors
Laser Displacement Sensors
Laser Ranging Sensors
0.001m(3X10^8m/s)=3ps