🚀 Practical Case: Selecting GMSL2 SerDes Solution for an 8-Megapixel Camera! (Including Formula Derivation and Selection Process)
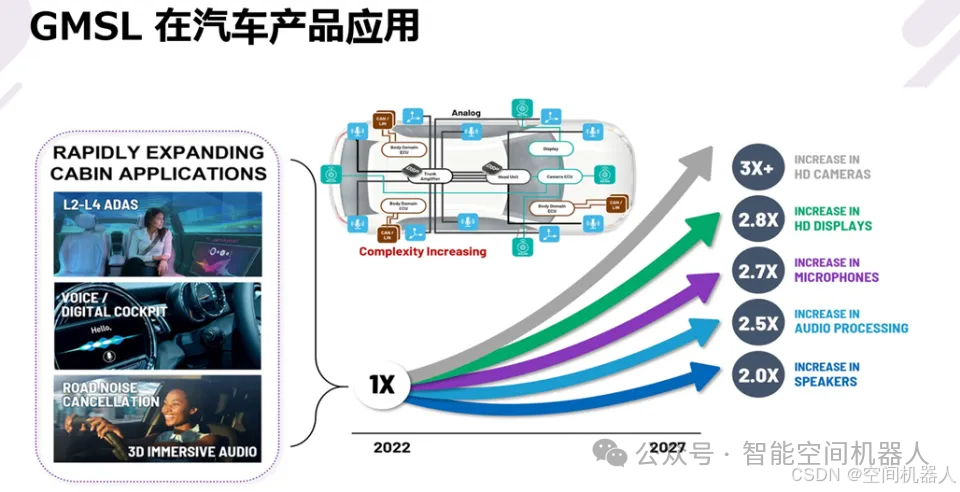
1. Background Setting
In this project, there is a camera with the following requirements:
- Sensor: 8 Megapixels
- Resolution: 3840 × 2160 (4K)
- Frame Rate: 30FPS
- Color Depth: 12bit (RAW12 format)
- Output Interface: MIPI CSI-2
- Must use GMSL2 protocol, single coaxial cable, transmitting to the main control domain controller
The question arises:🔔 Which GMSL2 SerDes + DeSer chip combination should be selected?
2. Step One: Deriving Bandwidth Requirements! 📈
Formula
The basic bandwidth formula (let’s review it again):

Common overhead factor is around 1.25 (considering MIPI overhead, encoding, and synchronization clock).
Substituting for Calculation
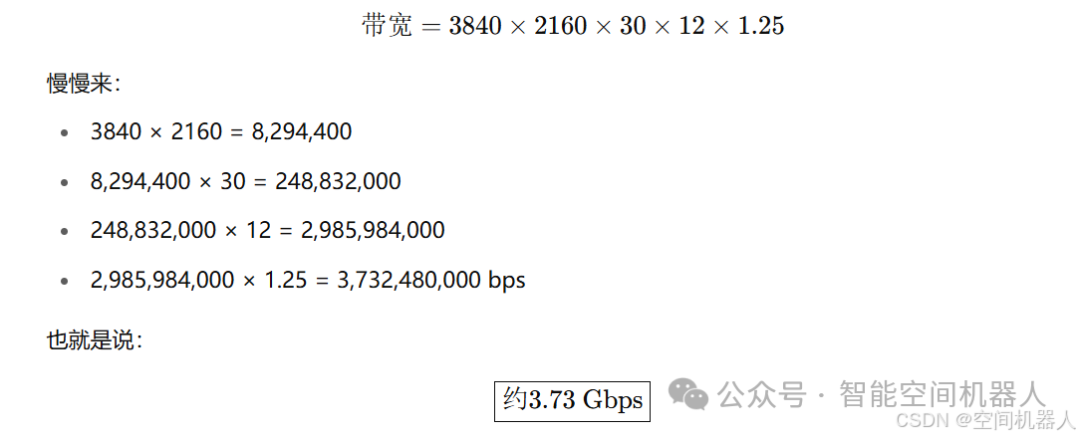
⚡ Final Conclusion:
This 8-megapixel camera requires at least3.73Gbps of effective link bandwidth!
3. Step Two: Confirming GMSL2 Link Bandwidth 🚗
Common GMSL2 SerDes chips, such as those from Maxim (acquired by Analog Devices):
- MAX9295 (Ser, serial transmitter)
- MAX9296 (Deser, serial receiver)
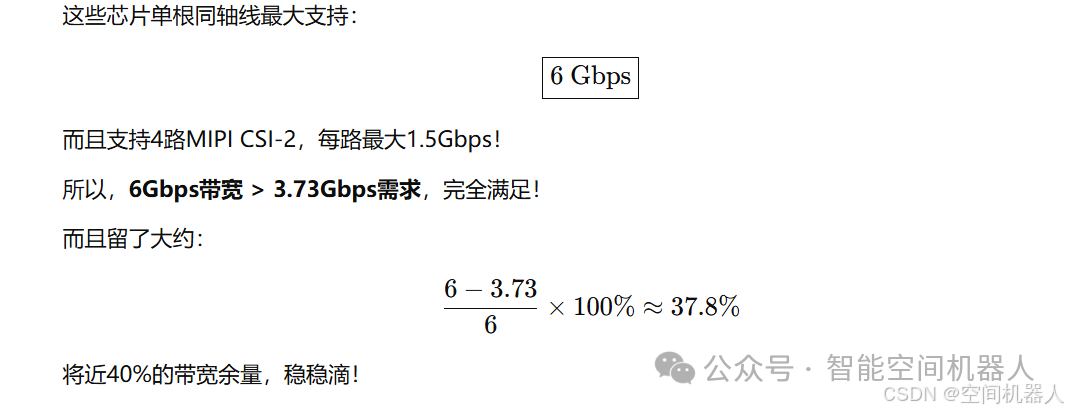
These chips support a maximum of:
4. Step Three: Matching MIPI Interface Count
Cameras generally use MIPI output, note:
- 8 Megapixels, 30 frames, 12bit, total bandwidth of 3.73Gbps
- If a single lane cannot handle it, 4 lanes can be used in parallel
MIPI’s D-PHY can generally run over 1.5Gbps per lane, so:
- 4 lanes provide a total of 6Gbps bandwidth
- Actual load is 3.73Gbps
- 👉 No problem at all
Reminder 🚨: If the camera output is only 2 lanes, be cautious, as each lane must handle 2Gbps, and you need to confirm whether the MIPI PHY supports such high speeds!
5. Step Four: Complete Link Diagram! 🔗
A small transmission link diagram can be drawn:
MIPI CSI-2 4lane
GMSL2 Coaxial Cable 6Gbps
MIPI CSI-2 4lane
8 Megapixel Camera
MAX9295 Ser
MAX9296 Des
Main Control SoC
Isn’t it clear at a glance? 🧠
6. Hidden Pitfalls Reminder! ⚡
Don’t think that calculating bandwidth is all there is to it! There are other pitfalls to be aware of:
| ⚠️ Project | 📜 Description |
|---|---|
| 1. Clock Synchronization | Is an external reference clock needed? MAX9295/9296 supports Coax synchronization/Refclk synchronization |
| 2. PoC Design | Power over Coax, PoC filters need to be well designed to avoid EMI issues! |
| 3. Distance Issues | GMSL2 typically supports 15m, choose the right cable (75Ω coaxial cable) |
| 4. Error Detection | GMSL2 has built-in ECC and CRC, but be mindful of packet recovery strategies |
| 5. Compatibility Issues | Confirm that the camera and main control’s MIPI timing are compatible, such as T_HS_PREPARE, T_CLK_PRE, etc. |
7. Conclusion
Simple Memory Mnemonic
“First calculate bandwidth, then check channels, then confirm interfaces, and finally consider cabling”
Practical Selection Recommendations
| Project | Recommended Model | Remarks |
|---|---|---|
| Ser (Transmitter) | MAX9295A/B | Supports GMSL2, coaxial transmission |
| Des (Receiver) | MAX9296A/B | Supports GMSL2, MIPI output |
| Coaxial Cable | RG174 or better | 75Ω impedance control |
🎈 Finally, to summarize in one sentence:
Selecting SerDes is like choosing a highway; if there are many cars, widen the road, if cars go fast, ensure the road is smooth, and safety must have guardrails (verification mechanisms)!