The SPI interface (Serial Peripheral Interface) is a synchronous serial communication protocol widely used for high-speed data exchange between devices over short distances. Its core features and technical details are as follows:
Communication Modes
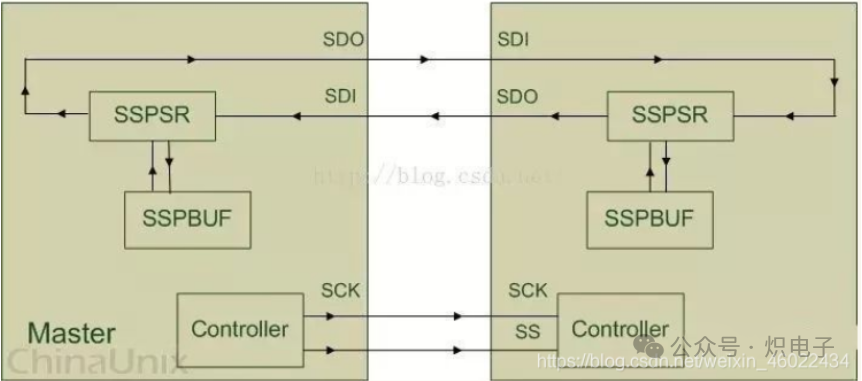
- Uses a master-slave architecture, supporting communication between a single master and one or more slave devices, with the master device managing the slave devices through a chip select signal (CS/SS).
- Full-duplex synchronous communication, with data transfer rates exceeding 100 MHz.
- Hardware Structure
- SCLK: The synchronous clock signal provided by the master device;
- MOSI: Master output, slave input data line;
- MISO: Master input, slave output data line;
- CS/SS: Slave chip select signal line.
 Four modes of the SPI bus: CPOL and CPHA.CPOL indicates the level state of the SPI bus clock when idle, where 0 represents low level and 1 represents high level.CPHA indicates which clock edge is sampled, where 0 indicates the first clock edge and 1 indicates the second clock edge.
Four modes of the SPI bus: CPOL and CPHA.CPOL indicates the level state of the SPI bus clock when idle, where 0 represents low level and 1 represents high level.CPHA indicates which clock edge is sampled, where 0 indicates the first clock edge and 1 indicates the second clock edge.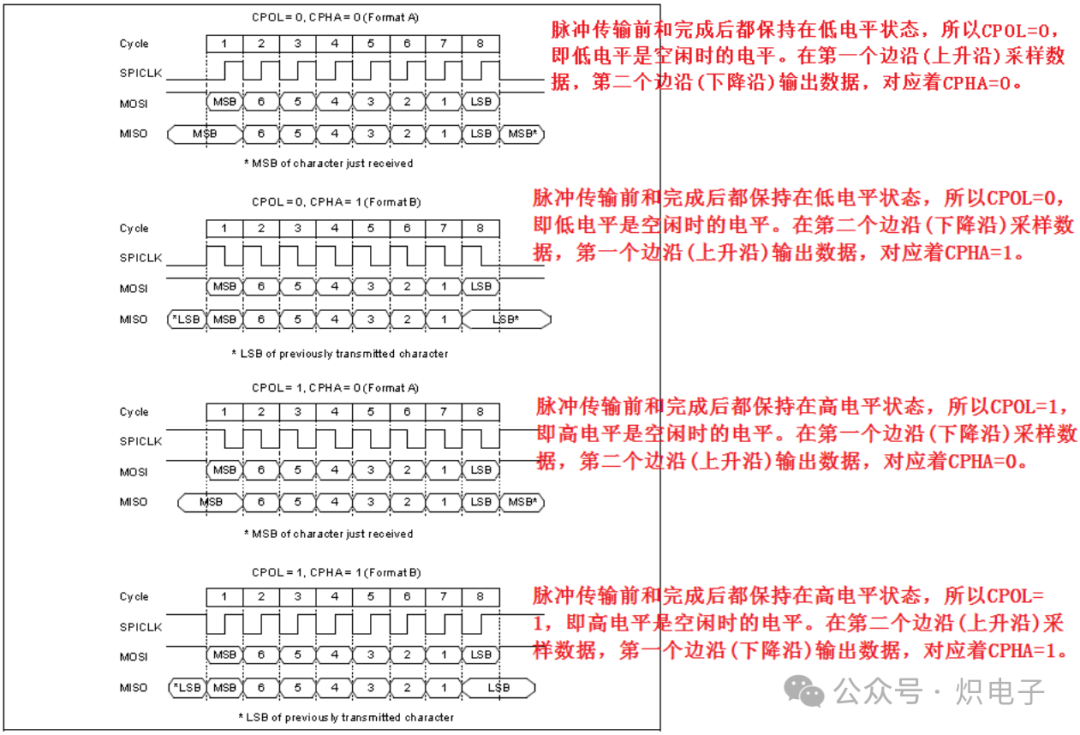 Objective of this experiment: Based on the Black Gold platform, implement SPI Master code for FPGA access to M25P16 SPI Flash, including reading the content of the first byte at address 000000, as well as reading the manufacturer ID and device ID of the M25P16.Project Structure:
Objective of this experiment: Based on the Black Gold platform, implement SPI Master code for FPGA access to M25P16 SPI Flash, including reading the content of the first byte at address 000000, as well as reading the manufacturer ID and device ID of the M25P16.Project Structure: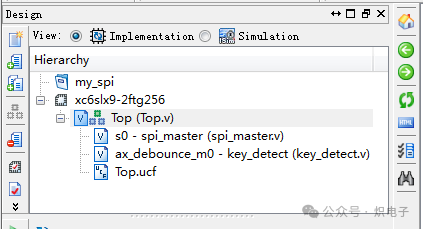 Hardware Structure:
Hardware Structure: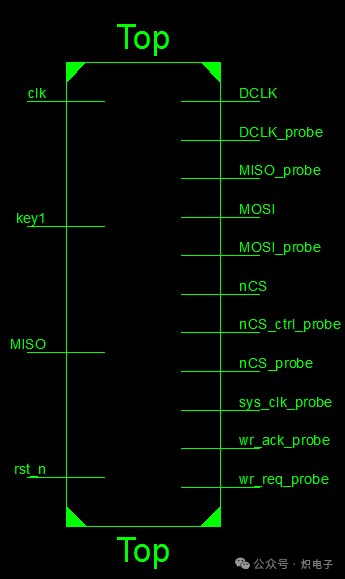 top.v
top.v
`timescale 1ns / 1ps
// Create a state machine to input commands to spi_master in sequence
module Top( input clk, input rst_n, output nCS, output DCLK, output MOSI, input MISO, input key1, // Button triggers transition from IDLE to SEND state
output MISO_probe, output nCS_ctrl_probe, output sys_clk_probe, output wr_req_probe, output DCLK_probe, output MOSI_probe, output nCS_probe, output wr_ack_probe );
/* State machine encoding */localparam S_IDLE = 4'd0;localparam S_SEND = 4'd1;localparam S_RECV = 4'd2;
/* Fixed data */localparam DATA0 = 8'h03;localparam DATA1 = 8'h00;localparam DATA2 = 8'h00;localparam DATA3 = 8'h00;
reg [7:0] data_in; wire [7:0] data_out;//reg wr_req;wire wr_ack;
reg nCS_ctrl;
reg [3:0] state;reg [3:0] next_state;
reg [7:0] send_cnt;reg [7:0] recv_cnt;
reg wr_ack_d0;reg wr_ack_d1;wire wr_ack_pos; // Detect rising edge
assign wr_ack_pos = wr_ack_d0 & ~wr_ack_d1;
wire button_negedge;
/* */
always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0)begin wr_ack_d0 <= 1'b0; wr_ack_d1 <= 1'b0;end
elsebegin wr_ack_d0 <= wr_ack; wr_ack_d1 <= wr_ack_d0;end
end
always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0) begin state <= S_IDLE; end
else begin state <= next_state; endend
/* Combinational logic */always @(*) begin case (state) S_IDLE: begin if(button_negedge == 1'b1) next_state = S_SEND;else next_state = S_IDLE;end
S_SEND:begin if(send_cnt == 8'd4) // send_cnt finished sending count begin next_state = S_RECV; end else begin next_state = S_SEND; end end
S_RECV: begin if(recv_cnt == 8'd1) // recv_cnt finished receiving countbegin next_state = S_IDLE;endelsebegin next_state = S_RECV;endend
default: next_state = S_IDLE; endcase
end
/* Handle send_cnt */always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0) begin send_cnt <= 8'd0;end
else if(state == S_SEND)begin if(wr_ack == 1'b1) begin send_cnt <= send_cnt + 8'd1;endend
elsebegin send_cnt <= 8'd0; end
end
/* Handle recv_cnt */always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0)begin recv_cnt <= 8'd0; end
else if(state == S_RECV) begin if(wr_ack_pos == 1'b1)begin recv_cnt <= recv_cnt + 8'd1; end end
else begin recv_cnt <= 8'd0;end
end
/* Handle nCS_ctrl */always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0) begin nCS_ctrl <= 1'd1;end
else if(state == S_RECV || state == S_SEND)begin nCS_ctrl <= 1'd0; end
else begin nCS_ctrl <= 1'd1;end
end
/* Handle data_in */always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0) begin data_in <= 8'd0;end
else if(state == S_SEND)begin if(send_cnt == 8'd0) data_in <= DATA0; else if(send_cnt == 8'd1) data_in <= DATA1;else if(send_cnt == 8'd2) data_in <= DATA2; else if(send_cnt == 8'd3) data_in <= DATA3;endend
spi_master s0( .sys_clk (clk ), .rst (~rst_n ), .nCS (nCS ), .DCLK (DCLK ), .MOSI (MOSI ), .MISO (MISO ), .CPOL (1'b1 ), .CPHA (1'b1 ), .nCS_ctrl (nCS_ctrl ), .clk_div (16'd0 ), .wr_req (~nCS_ctrl ), .wr_ack (wr_ack ), .data_in (data_in ), .data_out (data_out ),
/* Output for logic analysis */ .MISO_probe (MISO_probe ), .nCS_ctrl_probe (nCS_ctrl_probe ), .sys_clk_probe (sys_clk_probe ), .wr_req_probe (wr_req_probe ), .DCLK_probe (DCLK_probe ), .MOSI_probe (MOSI_probe ), .nCS_probe (nCS_probe ), .wr_ack_probe (wr_ack_probe )
);
/* Button detection */key_detect ax_debounce_m0( .clk (clk), .rst (~rst_n), .button_in (key1), .button_posedge (), .button_negedge (button_negedge), .button_out ());
endmodule
spi_master.v
module spi_master( input sys_clk, input rst, output nCS, //chip select (SPI mode) output DCLK, //spi clock output MOSI, //spi master data output input MISO, //spi master input input CPOL, input CPHA, input nCS_ctrl, input[15:0] clk_div, input wr_req, output wr_ack, input[7:0] data_in, output[7:0] data_out,
/* Output for logic analysis */ output MISO_probe , output nCS_ctrl_probe , output sys_clk_probe , output wr_req_probe , output DCLK_probe , output MOSI_probe , output nCS_probe , output wr_ack_probe
);
/* Output test signals */assign MISO_probe = MISO;assign nCS_ctrl_probe = nCS_ctrl;assign sys_clk_probe = sys_clk;assign wr_req_probe = wr_req;assign DCLK_probe = DCLK;assign MOSI_probe = MOSI;assign nCS_probe = nCS;assign wr_ack_probe = wr_ack;
localparam IDLE = 0;localparam DCLK_EDGE = 1;localparam DCLK_IDLE = 2;localparam ACK = 3;localparam LAST_HALF_CYCLE = 4;localparam ACK_WAIT = 5;reg DCLK_reg;reg[7:0] MOSI_shift;reg[7:0] MISO_shift;reg[2:0] state;reg[2:0] next_state;reg[15:0] clk_cnt;reg[4:0] clk_edge_cnt;
assign MOSI = MOSI_shift[7];assign DCLK = DCLK_reg;assign data_out = MISO_shift;assign wr_ack = (state == ACK);assign nCS = nCS_ctrl;
always@(posedge sys_clk or posedge rst)beginif(rst) state <= IDLE;else state <= next_state;end
always@(*)begincase(state) IDLE: if(wr_req == 1'b1) next_state <= DCLK_IDLE;else next_state <= IDLE; DCLK_IDLE://half a SPI clock cycle produces a clock edgeif(clk_cnt == clk_div) next_state <= DCLK_EDGE;else next_state <= DCLK_IDLE; DCLK_EDGE://a SPI byte with a total of 16 clock edgesif(clk_edge_cnt == 5'd15) next_state <= LAST_HALF_CYCLE;else next_state <= DCLK_IDLE;//this is the last data edge LAST_HALF_CYCLE:if(clk_cnt == clk_div) next_state <= ACK;else next_state <= LAST_HALF_CYCLE; //send one byte complete ACK: next_state <= ACK_WAIT;//wait for one clock cycle, to ensure that the cancel request signal ACK_WAIT: next_state <= IDLE;default: next_state <= IDLE; endcaseend
always@(posedge sys_clk or posedge rst)beginif(rst) DCLK_reg <= 1'b0;else if(state == IDLE) DCLK_reg <= CPOL;else if(state == DCLK_EDGE) DCLK_reg <= ~DCLK_reg;//SPI clock edgeend
//SPI clock wait counteralways@(posedge sys_clk or posedge rst)beginif(rst) clk_cnt <= 16'd0;else if(state == DCLK_IDLE || state == LAST_HALF_CYCLE) clk_cnt <= clk_cnt + 16'd1;else clk_cnt <= 16'd0;end
//SPI clock edge counteralways@(posedge sys_clk or posedge rst)beginif(rst) clk_edge_cnt <= 5'd0;else if(state == DCLK_EDGE) clk_edge_cnt <= clk_edge_cnt + 5'd1;else if(state == IDLE) clk_edge_cnt <= 5'd0;end
//SPI data outputalways@(posedge sys_clk or posedge rst)beginif(rst) MOSI_shift <= 8'd0;else if(state == IDLE && wr_req) MOSI_shift <= data_in;else if(state == DCLK_EDGE)if(CPHA == 1'b0 && clk_edge_cnt[0] == 1'b1) MOSI_shift <= {MOSI_shift[6:0],MOSI_shift[7]};else if(CPHA == 1'b1 && (clk_edge_cnt != 5'd0 && clk_edge_cnt[0] == 1'b0)) MOSI_shift <= {MOSI_shift[6:0],MOSI_shift[7]};end
//SPI data inputalways@(posedge sys_clk or posedge rst)beginif(rst) MISO_shift <= 8'd0;else if(state == IDLE && wr_req) MISO_shift <= 8'h00;else if(state == DCLK_EDGE)if(CPHA == 1'b0 && clk_edge_cnt[0] == 1'b0) MISO_shift <= {MISO_shift[6:0],MISO};else if(CPHA == 1'b1 && (clk_edge_cnt[0] == 1'b1)) MISO_shift <= {MISO_shift[6:0],MISO};end
endmodule
key_detect.v
`timescale 1 ns / 100 ps
module key_detect ( input clk, input rst, input button_in, output reg button_posedge, output reg button_negedge, output reg button_out);
//// ---------------- internal constants --------------
parameter N = 32 ; // debounce timer bitwidth
parameter FREQ = 50; //model clock :Mhz
parameter MAX_TIME = 20; //ms
localparam TIMER_MAX_VAL = MAX_TIME * 1000 * FREQ;
////---------------- internal variables ---------------
reg [N-1 : 0] q_reg; // timing regs
reg [N-1 : 0] q_next;
reg DFF1, DFF2; // input flip-flops
wire q_add; // control flags
wire q_reset;
reg button_out_d0;
//// ------------------------------------------------------
//// Continuous assignment for counter control
assign q_reset = (DFF1 ^ DFF2); // xor input flip flops to look for level change to reset counter
assign q_add = ~(q_reg == TIMER_MAX_VAL); // add to counter when q_reg msb is equal to 0
//// Combo counter to manage q_next always @ ( q_reset, q_add, q_reg)begin case( {q_reset , q_add}) 2'b00 : q_next <= q_reg; 2'b01 : q_next <= q_reg + 1; default : q_next <= { N {1'b0} }; endcase end
//// Flip flop inputs and q_reg update
always @ ( posedge clk or posedge rst)begin if(rst == 1'b1) begin DFF1 <= 1'b0; DFF2 <= 1'b0; q_reg <= { N {1'b0} }; end else begin DFF1 <= button_in; DFF2 <= DFF1; q_reg <= q_next; endend
//// Counter control
always @ ( posedge clk or posedge rst)beginif(rst == 1'b1) button_out <= 1'b1; else if(q_reg == TIMER_MAX_VAL) button_out <= DFF2; else button_out <= button_out;end
always @ ( posedge clk or posedge rst)beginif(rst == 1'b1) begin button_out_d0 <= 1'b1; button_posedge <= 1'b0; button_negedge <= 1'b0; endelse begin button_out_d0 <= button_out; button_posedge <= ~button_out_d0 & button_out; button_negedge <= button_out_d0 & ~button_out; end endendmodule
Pin Constraint File Top.ucf
NET "clk" IOSTANDARD = LVCMOS33;
NET "DCLK" IOSTANDARD = LVCMOS33;
NET "DCLK_probe" IOSTANDARD = LVCMOS33;
NET "MISO" IOSTANDARD = LVCMOS33;
NET "MISO_probe" IOSTANDARD = LVCMOS33;
NET "MOSI" IOSTANDARD = LVCMOS33;
NET "MOSI_probe" IOSTANDARD = LVCMOS33;
NET "nCS" IOSTANDARD = LVCMOS33;
NET "nCS_ctrl_probe" IOSTANDARD = LVCMOS33;
NET "nCS_probe" IOSTANDARD = LVCMOS33;
NET "sys_clk_probe" IOSTANDARD = LVCMOS33;
NET "wr_ack_probe" IOSTANDARD = LVCMOS33;
NET "wr_req_probe" IOSTANDARD = LVCMOS33;
NET "rst_n" IOSTANDARD = LVCMOS33;
NET "clk" LOC = T8;
NET "DCLK" LOC = R11;
NET "DCLK_probe" LOC = M4;
NET "MISO" LOC = P10;
NET "MISO_probe" LOC = N4;
NET "MOSI" LOC = T10;
NET "MOSI_probe" LOC = P2;
NET "nCS" LOC = T3;
NET "nCS_ctrl_probe" LOC = M5;
NET "nCS_probe" LOC = R2;
NET "rst_n" LOC = L3;
NET "sys_clk_probe" LOC = N6;
NET "wr_ack_probe" LOC = R1;
NET "wr_req_probe" LOC = P6;
# PlanAhead Generated physical constraints
NET "key1" LOC = C3;
# PlanAhead Generated IO constraints
NET "key1" IOSTANDARD = LVCMOS33;
Experiment Phenomenon 1: After compiling and programming the FPGA firmware, pressing the key1 button on the development board captured the SPI communication waveform with a logic analyzer, where the FPGA first sent the 03h command and the 000000 address, then read 1 byte of data 0E (the data written by the official Black Gold example).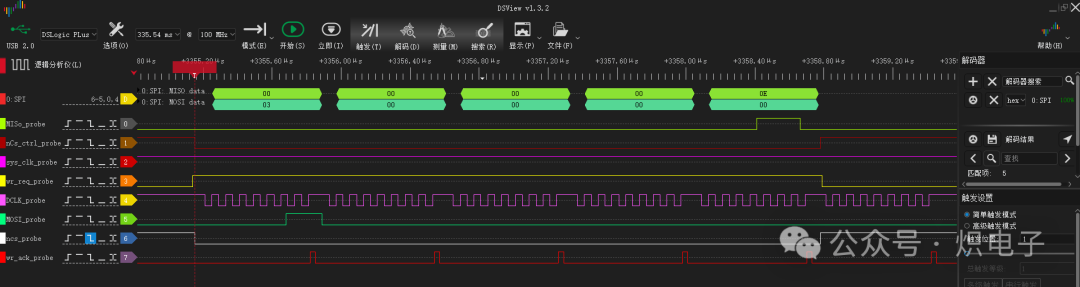 The preceding code implements data reading, and below is the code for reading the manufacturer ID and device ID of the M25P16, which only requires modifying the data in top.v, as shown in the modified code below.Top.v
The preceding code implements data reading, and below is the code for reading the manufacturer ID and device ID of the M25P16, which only requires modifying the data in top.v, as shown in the modified code below.Top.v
`timescale 1ns / 1ps
// Create a state machine to input commands to spi_master in sequence
module my_spi_top_2( input clk, input rst_n, output nCS, output DCLK, output MOSI, input MISO, input key1, // Button triggers transition from IDLE to SEND state
/* Connect signals for logic analysis */ output MISO_probe, output nCS_ctrl_probe, output sys_clk_probe, output wr_req_probe, output DCLK_probe, output MOSI_probe, output nCS_probe, output wr_ack_probe );
/* State machine encoding */localparam S_IDLE = 4'd0;localparam S_SEND = 4'd1;localparam S_RECV = 4'd2;
/* Fixed data, "READ IDENTIFICATION", the ID command for the M25P16 storage chip is 9Fh, 9Eh */localparam DATA0 = 8'h9f;localparam DATA1 = 8'h9e;localparam DATA2 = 8'h00;localparam DATA3 = 8'h00;
reg [7:0] data_in; wire [7:0] data_out;//reg wr_req;wire wr_ack;
reg nCS_ctrl;
reg [3:0] state;reg [3:0] next_state;
reg [7:0] send_cnt;reg [7:0] recv_cnt;
reg wr_ack_d0;reg wr_ack_d1;wire wr_ack_pos; // Detect rising edge
assign wr_ack_pos = wr_ack_d0 & ~wr_ack_d1;
wire button_negedge;
/* */
always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0)begin wr_ack_d0 <= 1'b0; wr_ack_d1 <= 1'b0;end
elsebegin wr_ack_d0 <= wr_ack; wr_ack_d1 <= wr_ack_d0;end
end
always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0) begin state <= S_IDLE; end
else begin state <= next_state; endend
/* Combinational logic */always @(*) begin case (state) S_IDLE: begin if(button_negedge == 1'b1) next_state = S_SEND;else next_state = S_IDLE;end
S_SEND:begin if(send_cnt == 8'd2) // send_cnt finished sending count, 9fh, 9eh commands require sending 2 bytes of data begin next_state = S_RECV; end else begin next_state = S_SEND; end end
S_RECV: begin if(recv_cnt == 8'd20) // recv_cnt finished receiving count, 9eh command reads back 20 bytes of data, including Manufacturer ID (EFh) and Device IDbegin next_state = S_IDLE;endelsebegin next_state = S_RECV;endend
default: next_state = S_IDLE; endcase
end
/* Handle send_cnt */always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0) begin send_cnt <= 8'd0;end
else if(state == S_SEND)begin if(wr_ack == 1'b1) begin send_cnt <= send_cnt + 8'd1;endend
elsebegin send_cnt <= 8'd0; end
end
/* Handle recv_cnt */always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0)begin recv_cnt <= 8'd0; end
else if(state == S_RECV) begin if(wr_ack_pos == 1'b1)begin recv_cnt <= recv_cnt + 8'd1; end end
else begin recv_cnt <= 8'd0;end
end
/* Handle nCS_ctrl */always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0) begin nCS_ctrl <= 1'd1;end
else if(state == S_RECV || state == S_SEND)begin nCS_ctrl <= 1'd0; end
else begin nCS_ctrl <= 1'd1;end
end
/* Handle data_in */always @(posedge clk or negedge rst_n) begin if(rst_n == 1'b0) begin data_in <= 8'd0;end
else if(state == S_SEND)begin if(send_cnt == 8'd0) data_in <= DATA0; else if(send_cnt == 8'd1) data_in <= DATA1;else if(send_cnt == 8'd2) data_in <= DATA2; else if(send_cnt == 8'd3) data_in <= DATA3;endend
spi_master s0( .sys_clk (clk ), .rst (~rst_n ), .nCS (nCS ), .DCLK (DCLK ), .MOSI (MOSI ), .MISO (MISO ), .CPOL (1'b1 ), .CPHA (1'b1 ), .nCS_ctrl (nCS_ctrl ), .clk_div (16'd0 ), .wr_req (~nCS_ctrl ), .wr_ack (wr_ack ), .data_in (data_in ), .data_out (data_out ),
/* Output for logic analysis */ .MISO_probe (MISO_probe ), .nCS_ctrl_probe (nCS_ctrl_probe ), .sys_clk_probe (sys_clk_probe ), .wr_req_probe (wr_req_probe ), .DCLK_probe (DCLK_probe ), .MOSI_probe (MOSI_probe ), .nCS_probe (nCS_probe ), .wr_ack_probe (wr_ack_probe )
);
/* Button detection */key_detect ax_debounce_m0( .clk (clk), .rst (~rst_n), .button_in (key1), .button_posedge (), .button_negedge (button_negedge), .button_out ());
endmodule
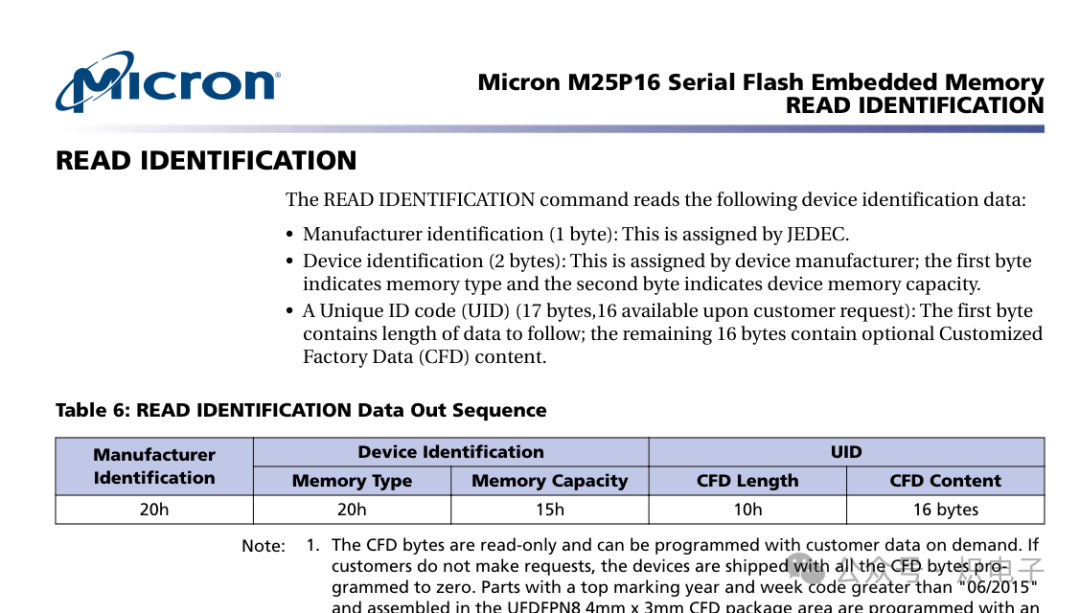
Experiment Phenomenon 2: After compiling and programming the FPGA firmware, pressing key1, the FPGA sent the commands specified in the M25P16 datasheet, 9fh and 9eh, and read the corresponding IDs.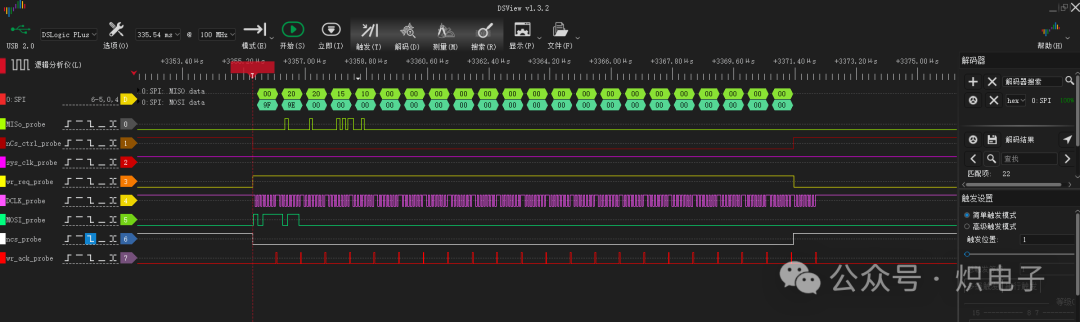 M25P16 Datasheet:
M25P16 Datasheet: