Click the blue text above to follow us



Author’s Note
🔊 Author Introduction: 985 graduate, researcher in the field of Matlab;
🚅SeatRightInscription行百里者,half于九十。
✅Business Scope: Complete Code, Paper Reproduction, Program Customization, Journal Writing, Research Collaboration
🏆CodeAcquisitionMethod:How to Obtain Matlab Poseidon Code
🏫 For more Matlab path planning simulation content click 👇
Matlab Path Planning (Advanced Version)


Introduction
📋📋📋 The table of contents is as follows: 🎁🎁🎁
Table of Contents
💥1 Overview
📚2 Part of the Code and Running Steps
🎉3 Running Results
🌈4 Matlab Version and References
🔎5 Code Acquisition Method
🍅6 Simulation Consultation



1 Overview
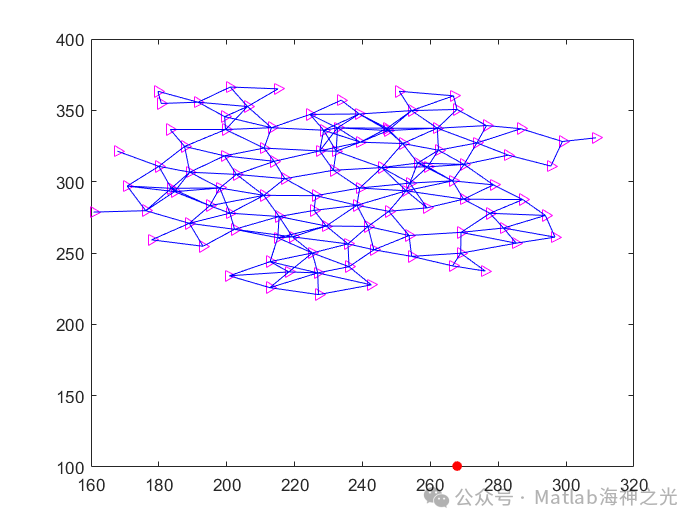
MSN Flocking Control, Target Tracking, Obstacle Avoidance
MSN flocking is a technology that utilizes multiple drones to form a flock, achieving functions such as swarm control, target tracking, and obstacle avoidance through flocking technology. Below is a brief introduction to its principles and processes: 1 Principle: – Flocking Control: Through swarm control algorithms, multiple drones are formed into a flock to achieve coordinated actions. The drones in the flock can control and maintain relative positions, communicating and exchanging information physically through communication protocols. – Target Tracking: One or more drones in the flock are responsible for the target tracking task. These drones obtain information about the target using sensors (such as cameras, radars, etc.) and use target tracking algorithms for real-time tracking. – Obstacle Avoidance: Drones in the flock use obstacle avoidance sensors (such as laser radars, infrared sensors, etc.) to perceive the location and shape of obstacles in real-time and decide on paths to avoid obstacles using obstacle avoidance algorithms. 2 Process: – Flock Formation: Drones establish communication links based on flock control algorithms through communication protocols to form a flock. Drones in the flock control and maintain relative positions according to specified protocols and instructions. – Target Tracking: Designate one or more drones as target trackers, equipped with sensors to perceive the target in real-time and obtain target information. Implement target tracking through tracking algorithms. – Obstacle Avoidance Path Planning: Drones in the flock equipped with obstacle avoidance sensors perceive surrounding obstacle information in real-time. Calculate paths to avoid obstacles using obstacle avoidance algorithms. – Path Execution: Drones execute corresponding flight actions based on path instructions obtained from target tracking and obstacle avoidance algorithms, including position adjustments and obstacle avoidance. The above is a brief introduction to the principles and processes of MSN flocking control, target tracking, and obstacle avoidance. The specific implementation process may involve more details and algorithms.

2 Part of the Code and Running Steps
(1) Directly run main.m to generate the graph with one click

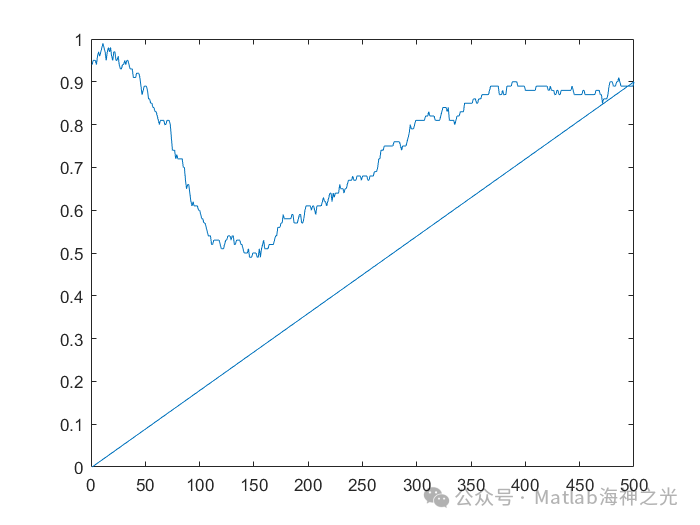
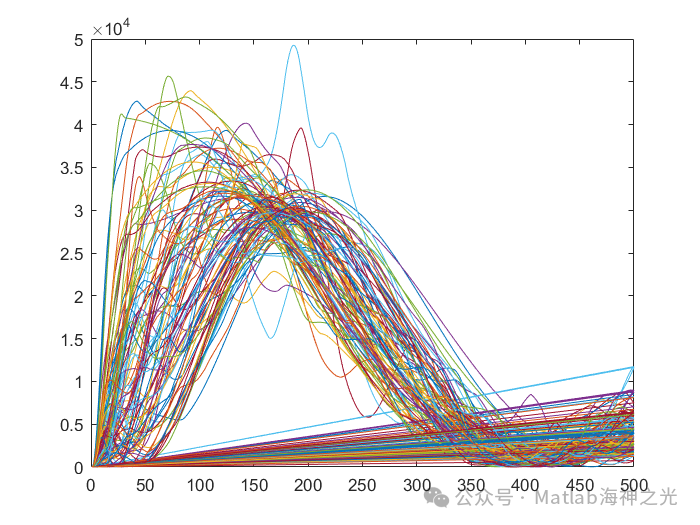
3Running Results
3Running Results

4Matlab Version and References
1 Matlab Version
2019b
2 References
[1] Hu Yangyang. Group Consistency of Heterogeneous Multi-Agent Systems under Equivalent Partition[J]. Science and Technology Innovation. 2024
3 Note
This part is excerpted from the internet for reference only. If there is infringement, please contact for deletion


5 Code Acquisition Method
CodeAcquisitionMethod:How to Obtain Matlab Poseidon Code

6 Simulation Consultation
**🍅 Simulation Consultation
1 Various Intelligent Optimization Algorithms Improvement and Application**
1.1 PID Optimization
1.2 VMD Optimization
1.3 Distribution Network Reconstruction
1.4 Three-Dimensional Packing
1.5 Microgrid Optimization
1.6 Optimization Layout
1.7 Optimization Parameters
1.8 Optimization Costs
1.9 Optimization Charging
1.10 Optimization Scheduling
1.11 Optimization Pricing
1.12 Optimization Dispatching
1.13 Optimization Allocation
1.14 Optimization Coverage
1.15 Optimization Control
1.16 Optimization Inventory
1.17 Optimization Routing
1.18 Optimization Design
1.19 Optimization Location
1.20 Optimization Absorption
1.21 Optimization Site Selection
1.22 Optimization Operation
1.23 Optimization Assignment
1.24 Optimization Combination
1.25 Workshop Scheduling
1.26 Production Scheduling
1.27 Economic Scheduling
1.28 Assembly Line Scheduling
1.29 Reservoir Scheduling
1.30 Warehouse Position Optimization
1.31 Bus Scheduling Optimization
1.32 Container Ship Loading Optimization
1.33 Pump Combination Optimization
1.34 Medical Resource Allocation Optimization
1.35 Visible Base Station and Drone Site Selection Optimization
**2 Machine Learning and Deep Learning Classification and Prediction**
**2.1 Machine Learning and Deep Learning Classification**
2.1.1 BiLSTM Bidirectional Long Short-Term Memory Neural Network Classification
2.1.2 BP Neural Network Classification
2.1.3 CNN Convolutional Neural Network Classification
2.1.4 DBN Deep Belief Network Classification
2.1.5 DELM Deep Learning Extreme Learning Machine Classification
2.1.6 ELMAN Recurrent Neural Network Classification
2.1.7 ELM Extreme Learning Machine Classification
2.1.8 GRNN General Regression Neural Network Classification
2.1.9 GRU Gated Recurrent Unit Classification
2.1.10 KELM Hybrid Kernel Extreme Learning Machine Classification
2.1.11 KNN Classification
2.1.12 LSSVM Least Squares Support Vector Machine Classification
2.1.13 LSTM Long Short-Term Memory Network Classification
2.1.14 MLP Multi-Layer Perceptron Classification
2.1.15 PNN Probabilistic Neural Network Classification
2.1.16 RELM Robust Extreme Learning Machine Classification
2.1.17 RF Random Forest Classification
2.1.18 SCN Stochastic Configuration Network Model Classification
2.1.19 SVM Support Vector Machine Classification
2.1.20 XGBOOST Classification
**2.2 Machine Learning and Deep Learning Prediction**
2.2.1 ANFIS Adaptive Neuro-Fuzzy Inference System Prediction
2.2.2 ANN Artificial Neural Network Prediction
2.2.3 ARMA Autoregressive Moving Average Model Prediction
2.2.4 BF Particle Filter Prediction
2.2.5 BiLSTM Bidirectional Long Short-Term Memory Neural Network Prediction
2.2.6 BLS Broad Learning System Prediction
2.2.7 BP Neural Network Prediction
2.2.8 CNN Convolutional Neural Network Prediction
2.2.9 DBN Deep Belief Network Prediction
2.2.10 DELM Deep Learning Extreme Learning Machine Prediction
2.2.11 DKELM Regression Prediction
2.2.12 ELMAN Recurrent Neural Network Prediction
2.2.13 ELM Extreme Learning Machine Prediction
2.2.14 ESN Echo State Network Prediction
2.2.15 FNN Feedforward Neural Network Prediction
2.2.16 GMDN Prediction
2.2.17 GMM Gaussian Mixture Model Prediction
2.2.18 GRNN General Regression Neural Network Prediction
2.2.19 GRU Gated Recurrent Unit Prediction
2.2.20 KELM Hybrid Kernel Extreme Learning Machine Prediction
2.2.21 LMS Least Mean Squares Algorithm Prediction
2.2.22 LSSVM Least Squares Support Vector Machine Prediction
2.2.23 LSTM Long Short-Term Memory Network Prediction
2.2.24 RBF Radial Basis Function Neural Network Prediction
2.2.25 RELM Robust Extreme Learning Machine Prediction
2.2.26 RF Random Forest Prediction
2.2.27 RNN Recurrent Neural Network Prediction
2.2.28 RVM Relevance Vector Machine Prediction
2.2.29 SVM Support Vector Machine Prediction
2.2.30 TCN Temporal Convolutional Network Prediction
2.2.31 XGBoost Regression Prediction
2.2.32 Fuzzy Prediction
2.2.33 Singular Spectrum Analysis Method (SSA) Time Series Prediction
**2.3 Machine Learning and Deep Learning Practical Application Prediction**
CPI Index Prediction, PM2.5 Concentration Prediction, SOC Prediction, Financial Early Warning Prediction, Yield Prediction, Parking Space Prediction, Pest Prediction, Steel Thickness Prediction, Battery Health Status Prediction, Power Load Prediction, Housing Price Prediction, Corrosion Rate Prediction, Fault Diagnosis Prediction, Photovoltaic Power Prediction, Trajectory Prediction, Aircraft Engine Life Prediction, Exchange Rate Prediction, Concrete Strength Prediction, Heating Furnace Temperature Prediction, Price Prediction, Traffic Flow Prediction, Resident Consumption Index Prediction, Air Quality Prediction, Grain Temperature Prediction, Temperature Prediction, Clear Water Value Prediction, Unemployment Rate Prediction, Electricity Consumption Prediction, Transport Volume Prediction, Manufacturing Purchasing Manager Index Prediction
**3 Image Processing Aspects**
**3.1 Image Edge Detection**
**3.2 Image Processing**
**3.3 Image Segmentation**
**3.4 Image Classification**
**3.5 Image Tracking**
**3.6 Image Encryption and Decryption**
**3.7 Image Retrieval**
**3.8 Image Registration**
**3.9 Image Stitching**
**3.10 Image Evaluation**
**3.11 Image Denoising**
**3.12 Image Fusion**
**3.13 Image Recognition**
3.13.1 Dial Recognition
3.13.2 Lane Line Recognition
3.13.3 Vehicle Counting
3.13.4 Vehicle Recognition
3.13.5 License Plate Recognition
3.13.6 Parking Space Recognition
3.13.7 Size Detection
3.13.8 Answer Sheet Recognition
3.13.9 Appliance Recognition
3.13.10 Fall Detection
3.13.11 Animal Recognition
3.13.12 QR Code Recognition
3.13.13 Invoice Recognition
3.13.14 Clothing Recognition
3.13.15 Chinese Character Recognition
3.13.16 Traffic Light Recognition
3.13.17 Iris Recognition
3.13.18 Fire Detection
3.13.19 Disease Classification
3.13.20 Traffic Sign Recognition
3.13.21 Card Number Recognition
3.13.22 Mask Recognition
3.13.23 Crack Detection
3.13.24 Target Tracking
3.13.25 Fatigue Detection
3.13.26 Flag Recognition
3.13.27 Grass Recognition
3.13.28 Face Recognition
3.13.29 Renminbi Recognition
3.13.30 ID Card Recognition
3.13.31 Gesture Recognition
3.13.32 Digital Letter Recognition
3.13.33 Palm Recognition
3.13.34 Leaf Recognition
3.13.35 Fruit Recognition
3.13.36 Barcode Recognition
3.13.37 Temperature Detection
3.13.38 Defect Detection
3.13.39 Chip Detection
3.13.40 Behavior Recognition
3.13.41 Verification Code Recognition
3.13.42 Medicinal Material Recognition
3.13.43 Coin Recognition
3.13.44 Postal Code Recognition
3.13.45 Playing Card Recognition
3.13.46 Fingerprint Recognition
**3.14 Image Restoration**
**3.15 Image Compression**
**3.16 Image Steganography**
**3.17 Image Enhancement**
**3.18 Image Reconstruction**
**4 Path Planning Aspects**
**4.1 Traveling Salesman Problem (TSP)**
4.1.1 Single Traveling Salesman Problem (TSP)
4.1.2 Multiple Traveling Salesman Problem (MTSP)
**4.2 Vehicle Routing Problem (VRP)**
4.2.1 Vehicle Routing Problem (VRP)
4.2.2 Capacitated Vehicle Routing Problem (CVRP)
4.2.3 Capacitated + Time Window + Distance Vehicle Routing Problem (DCTWVRP)
4.2.4 Capacitated + Distance Vehicle Routing Problem (DCVRP)
4.2.5 Distance Vehicle Routing Problem (DVRP)
4.2.6 Vehicle Routing Problem with Charging Stations + Time Windows (ETWVRP)
4.2.3 Vehicle Routing Problem with Multiple Capacities (MCVRP)
4.2.4 Distance Multi-Vehicle Routing Problem (MDVRP)
4.2.5 Vehicle Routing Problem with Simultaneous Pickup and Delivery (SDVRP)
4.2.6 Vehicle Routing Problem with Time Windows + Capacity (TWCVRP)
4.2.6 Vehicle Routing Problem with Time Windows (TWVRP)
**4.3 Multimodal Transportation Problem**
**4.4 Robot Path Planning**
4.4.1 Obstacle Avoidance Path Planning
4.4.2 Maze Path Planning
4.4.3 Grid Map Path Planning
**4.5 Delivery Path Planning**
4.5.1 Cold Chain Delivery Path Planning
4.5.2 Takeout Delivery Path Planning
4.5.3 Mask Delivery Path Planning
4.5.4 Medicine Delivery Path Planning
4.5.5 Delivery Path Planning Including Charging Stations
4.5.6 Chain Supermarket Delivery Path Planning
4.5.7 Vehicle Coordinated Drone Delivery Path Planning
**4.6 Drone Path Planning**
4.6.1 Aircraft Simulation
4.6.2 Drone Flight Operations
4.6.3 Drone Trajectory Tracking
4.6.4 Drone Swarm Simulation
4.6.5 Three-Dimensional Path Planning for Drones
4.6.6 Drone Formation
4.6.7 Drone Cooperative Tasks
4.6.8 Drone Task Assignment
**5 Speech Processing**
**5.1 Speech Emotion Recognition**
**5.2 Sound Source Localization**
**5.3 Feature Extraction**
**5.4 Speech Coding**
**5.5 Speech Processing**
**5.6 Speech Separation**
**5.7 Speech Analysis**
**5.8 Speech Synthesis**
**5.9 Speech Encryption**
**5.10 Speech Denoising**
**5.11 Speech Recognition**
**5.12 Speech Compression**
**5.13 Speech Hiding**
**6 Cellular Automata Aspects**
**6.1 Cellular Automata Virus Simulation**
**6.2 Cellular Automata Urban Planning**
**6.3 Cellular Automata Traffic Flow**
**6.4 Cellular Automata Gas**
**6.5 Cellular Automata Personnel Evacuation**
**6.6 Cellular Automata Forest Fire**
**6.7 Cellular Automata Game of Life**
**7 Signal Processing Aspects**
**7.1 Fault Signal Diagnosis Analysis**
7.1.1 Gear Damage Identification
7.1.2 Asynchronous Motor Rotor Broken Bar Fault Diagnosis
7.1.3 Rolling Element Inner and Outer Ring Fault Diagnosis Analysis
7.1.4 Motor Fault Diagnosis Analysis
7.1.5 Bearing Fault Diagnosis Analysis
7.1.6 Gearbox Fault Diagnosis Analysis
7.1.7 Three-Phase Inverter Fault Diagnosis Analysis
7.1.8 Diesel Engine Fault Diagnosis
**7.2 Radar Communication**
7.2.1 FMCW Simulation
7.2.2 GPS Anti-Jamming
7.2.3 Radar LFM
7.2.4 Radar MIMO
7.2.5 Radar Angle Measurement
7.2.6 Radar Imaging
7.2.7 Radar Localization
7.2.8 Radar Echo
7.2.9 Radar Detection
7.2.10 Radar Digital Signal Processing
7.2.11 Radar Communication
7.2.12 Radar Phased Array
7.2.13 Radar Signal Analysis
7.2.14 Radar Early Warning
7.2.15 Radar Pulse Compression
7.2.16 Antenna Radiation Pattern
7.2.17 Radar Clutter Simulation
**7.3 Biological Electrical Signals**
7.3.1 Electromyography Signal (EMG)
7.3.2 Electroencephalography Signal (EEG)
7.3.3 Electrocardiography Signal (ECG)
7.3.4 Heart Simulation
**7.4 Communication Systems**
7.4.1 DOA Estimation
7.4.2 LEACH Protocol
7.4.3 Encoding and Decoding
7.4.4 Variational Mode Decomposition
7.4.5 Ultra-Wideband Simulation
7.4.6 Multipath Fading Simulation
7.4.7 Cellular Networks
7.4.8 Pipeline Leakage
7.4.9 Empirical Mode Decomposition
7.4.10 Filter Design
7.4.11 Analog Signal Transmission
7.4.12 Analog Signal Modulation
7.4.13 Digital Baseband Signal
7.4.14 Digital Channel
7.4.15 Digital Signal Processing
7.4.16 Digital Signal Transmission
7.4.17 Digital Signal Denoising
7.4.18 Underwater Acoustic Communication
7.4.19 Communication Simulation
**7.5 Drone Communication**
**7.6 Wireless Sensor Positioning and Layout Aspects**
7.6.1 WSN Positioning
7.6.2 Height Estimation
7.6.3 Filtering Tracking
7.6.4 Target Positioning
7.6.4.1 Dv-Hop Positioning
7.6.4.2 RSSI Positioning
7.6.4.3 Intelligent Algorithm Optimization Positioning
7.6.5 Integrated Navigation
**8 Power System Aspects**
Microgrid Optimization, Reactive Optimization, Distribution Network Reconstruction, Energy Storage Configuration