

When it comes to robots, influenced by the term “human” in the name, most people might picture either the adorable and agile NAO robot or the polite and well-behaved ASIMO robot, or perhaps David, who looks just like a human in the movie “Artificial Intelligence.” In fact, these robots belong to the category of humanoid robots, designed and manufactured to mimic human form and behavior, generally possessing human-like limbs and head either separately or simultaneously.

However, aside from humanoid robots, a significant portion of bionic robots is modeled after our friends in nature—the biological organisms that inspire their creation.
Bionic robots refer to robots that imitate biological characteristics and perform tasks characteristic of living organisms. Currently, mechanical pets are quite popular in Western countries, and bionic sparrow robots can undertake environmental monitoring tasks, showcasing vast development potential. As humanity enters an aging society in the 21st century, the development of humanoid robots will compensate for the severe shortage of young labor, addressing social issues related to household services and healthcare in an aging society, while also opening up new industries and creating new job opportunities.
The architecture of robot systems refers to the structural approach of one or several robots in information processing and control logic to achieve specified goals.
Function-Based Decomposition
The function-based decomposition architecture in artificial intelligence belongs to traditional deliberative intelligence, characterized by serial distribution in structure and asynchronous execution in operation, following a “perceive-plan-act” model for information processing and control realization. A typical representative is the NASR human robot proposed by NASA and the National Institute of Standards and Technology. The advantage of this architecture is that the system’s functions are clear, with well-defined layers, and simple implementation. However, the processing method greatly extends the system’s response time to external events, and changes in the environment necessitate replanning, thereby reducing execution efficiency. Thus, it is only suitable for completing relatively complex tasks in known structured environments.
Behavior-Based Decomposition
The behavior-based decomposition architecture in artificial intelligence represents modern reactive intelligence, characterized by parallel (inclusive) distribution in structure and synchronous execution in operation, following a “perceive-act” model for parallel information processing and control. Typical representatives include the behavior-based layered inclusive architecture proposed by R.A. Brooks at MIT and the motor schema-based structure proposed by Arkin. Its main advantages are short execution time, high efficiency, and strong mobility. However, due to a lack of overall management, it is difficult to adapt to various situations. Therefore, it is only suitable for executing relatively simple tasks in unstructured environments.
Intelligence-Based Decomposition
The intelligence-based decomposition architecture in artificial intelligence represents the latest distributed intelligence, characterized by decentralized distribution in structure and collaborative execution in operation, where each agent can solve local problems independently while also collaborating to solve single or multiple global issues. A typical representative is the multi-agent-based architecture. This architecture’s advantages include possessing both characteristics of “intelligent distribution” and a unified coordination mechanism. However, how to reasonably divide and coordinate among various intelligent agents still requires extensive research and practice. This architecture has widespread applications in many large intelligent information processing systems.
Besides the three main types of architectures mentioned above, there are also some improved hybrid architectures, such as behavior decomposition models with feedback loops, layered architectures based on distributed intelligence, and multi-agent structures based on functional decomposition. However, overall, they either lack flexibility and scalability in functional modules or fail to coordinate deliberative intelligence and reactive intelligence effectively, or the communication mechanisms between layers are not sufficiently refined.
Control System
Principles of Bionic Architecture
Essentially, deliberative intelligence, reactive intelligence, and distributed intelligence are all borrowings and imitations of biological control logic and reasoning methods. However, due to objective conditions and the limitations of demand purposes, they only represent a one-sided, partial imitation of biological intelligence from certain angles and directions. The bionic architecture proposed in this article is based on the aforementioned biological control logic and behavioral reasoning, fully drawing on the advantages and shortcomings of the three architectural ideas of deliberative intelligence, reactive intelligence, and distributed intelligence. It aims to address the shortcomings and issues in the control architecture of robots, especially mobile robots working in unknown environments, proposing a new control philosophy and concept with adaptive behavior and evolutionary capabilities.
By borrowing the ideas of distributed intelligence, a social behavior control layer is introduced into the control architecture;
By borrowing the idea of biological adaptability, learning from the deliberative behavior layer to the reflex behavior layer is realized within the same generation in the control architecture;
By borrowing the idea of biological self-evolution, evolution (or degeneration) from the reflex behavior layer to the instinctive behavior layer is realized across generations in the control architecture.
Thus, the bionic architecture consists of four behavior control layers: instinctive behavior control layer, reflex behavior control layer, deliberative behavior control layer, and social behavior control layer. They receive external and internal information from the perception layer in parallel, make logical judgments and reactions, and send control information to the end execution layer, adjusting themselves and adapting to the external environment through competition and coordination, thereby accomplishing work tasks according to objectives.
Examples
Robot Scorpion
The robot scorpion, measuring about 50 centimeters, differs from traditional robots in that it does not possess the ability to solve complex problems. The robot scorpion relies almost entirely on reflex actions to navigate. This enables it to quickly respond to any obstacles it encounters, with two ultrasonic sensors on its head. If it encounters an obstacle taller than 50% of its height, it will navigate around it. Moreover, if the left sensor detects an obstacle, it will automatically turn to the right.
Mechanical Cockroach
Not only scorpions but even cockroaches can inspire scientists’ designs. Researchers have discovered that cockroaches only have three legs on the ground during high-speed movement—two on one side and one on the other, repeating this cycle. Based on this principle, bionicists have created a mechanical cockroach that can move three meters per second, with excellent balance, allowing it to adapt to various harsh environments. In the near future, it could be used for space exploration or mine clearance.
Robot Pike
The robot pike from MIT is the world’s first robot fish capable of swimming freely. It is mostly made of fiberglass, covered with a layer of wire mesh, and the outermost layer is made of synthetic elastic fiber. Its tail consists of a spring-like conical fiberglass coil, making the robot pike both sturdy and flexible. A servo motor powers this robot fish.
Robot Frog
The robot frog’s knee is equipped with springs, allowing it to bend its legs like a frog and leap. The furthest distance a robot frog can jump on Earth is 2.4 meters; on Mars, due to the gravity being about one-third that of Earth, it could leap as far as 7.2 meters, approaching the human long jump world record. Thus, it will no longer be at a loss when faced with a small stone, as the Mars rover was in 2007.
Robot Spider
This was created by space engineers inspired by spiders’ wall-climbing skills. It is equipped with a set of antennas that mimic insect antennae, allowing it to detect terrain and obstacles as it moves its long legs. The prototype of the robot spider is quite small, standing only 18 centimeters tall, not much larger than a human hand. These “spider-men” can not only climb Martian slopes that rovers cannot reach but are also cost-effective, so a large number of space “spider-men” could spread across the Martian landscape.
Robot Tuna
The robot tuna is MIT’s latest achievement in the field of robot fish since “Charlie.” This new prototype has a soft body, containing only one engine and six moving parts, allowing it to better simulate the movements of real fish.
Robot Gecko
Dr. Li Xiaoyang and his research team at Zhuhai New Concept Aerospace Co., Ltd. successfully developed the bionic robot gecko “Shenxingzhe” on November 15, 2008. This small, agile intelligent robot has the potential for widespread application in search and rescue, anti-terrorism, as well as scientific experiments and investigations in the near future. According to Dr. Li, this robot gecko can quickly climb vertically up and down walls, underground, and in wall crevices of various buildings, or walk upside down on ceilings, adapting to smooth glass, rough or dusty walls, and various metal surfaces, automatically identifying obstacles and avoiding them, with movements that are agile and realistic. Its flexibility and speed can rival that of natural geckos.
Robot Jellyfish
The U.S. Navy Research Office has developed a “robot jellyfish” that can be used to monitor surface ships and submarines, detect chemical spills, and track the movements of migratory fish. These robot jellyfish are made of bio-responsive memory alloys connected by fine wires that contract like muscle tissue when heated.
Next, let’s explore these beautiful and adorable bionic robots:
1. Robot Fish
Robot fish, as the name suggests, are robots that resemble fish. Compared to traditional underwater vehicles (AUVs) that rely on propeller propulsion, robot fish achieve a unified propulsion and steering mechanism, offering advantages such as efficiency, high maneuverability, and low disturbance, making them more suitable for monitoring, searching, exploring, and rescue operations in narrow, complex, and dynamic underwater environments.
Marine organisms have evolved extraordinary underwater movement capabilities through long-term natural selection, demonstrating high efficiency, speed, and maneuverability. The propulsion methods of aquatic animals include body and/or caudal fin (BCF) propulsion mode, median and/or paired fin (MPF) propulsion mode, and jet propulsion mode:
Body and tail fin propulsion mode (BCF): Fish using this mode primarily generate thrust through body undulations and tail fin movements, exhibiting excellent instantaneous acceleration and strong cruising capabilities.
Median and paired fin propulsion mode (MPF): This mode primarily relies on the movements of pectoral or pelvic fins to generate thrust, demonstrating good maneuverability.
Jet propulsion mode: This mode primarily relies on compressing a cavity to form reactive force for thrust.
Most fish employ the first two propulsion modes. Since MIT developed the world’s first bionic tuna robot (Robotuna) in 1994, research on robot fish has surged both internationally and domestically. Various forms of robot fish and robot dolphins have been reported. Notable institutions excelling in this field include MIT and the Institute of Automation at the Chinese Academy of Sciences. On May 28 of this year, a soft robot fish from MIT was included in the review article “Design, Fabrication and Control of Soft Robots” in the journal Nature due to its outstanding performance, so I will take this robot as a representative to introduce robot fish.
The MIT robot fish focuses on enabling the robot to perform rapid escape responses.
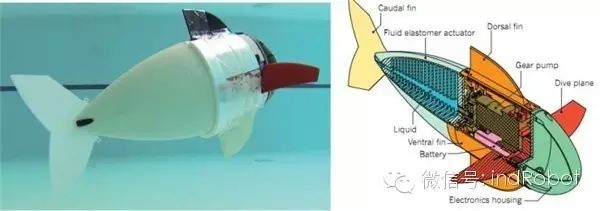
The robot employs a structure that mimics the body of a real fish, with embedded systems in the driving components. It features an innovative fluid drive system that powers its body movements, and includes all the subsystems onboard traditional robots: power supply, actuators, processors, and controllers. This robot fish imitates the escape response of real fish and uses C-shaped starting control, as such swimming requires rapid body acceleration and continuous movement. Through experiments, this robot fish can complete an escape response in just 160 milliseconds.
In addition to the robot fish that swims freely like a fish in water, there is also a creature that can swim in water and walk on land, which is the amphibious robot fish.
Researchers at the École Polytechnique Fédérale de Lausanne in Switzerland designed a robot salamander, and their results were published in the journal Science. They designed six spinal joints, four movable limb joints, and ten motors for the robot salamander, enabling it to mimic the S-shaped body undulation pattern of amphibians. Electric signals transmitted wirelessly from a computer can adjust the robot salamander’s speed, direction, and gait type. This control mechanism resembles the process of signal transmission in the spinal cord of vertebrates. This control method has also been named Central Pattern Generator (CPG), becoming a widely used control method for many bionic fish, with far-reaching influence. The second version of the bionic salamander is named Pleurobot, which is closer in form to a real salamander and has improved performance.
2. Robot Jellyfish
In the introduction of propulsion modes above, robot fish primarily utilize the first two propulsion modes, while the jet propulsion mode is the one used by jellyfish in nature. The jet propulsion mode produces less noise and vibration, being 7-10 decibels lower than vessels with propellers. It has a shallow draft, minimal shallow water effects, a simple transmission mechanism, low drag, good protection performance, and easy daily maintenance. Compared to the tail fin propulsion mode and median fin propulsion mode of bionic robot fish, it also offers advantages such as zero radius turning and stability. With so many advantages, it is naturally a target of imitation for scientists.

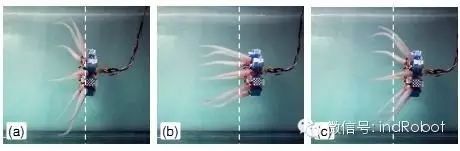
When it comes to the contraction and expansion of jet propulsion, people naturally think of making the materials used to create robot jellyfish “twitch” themselves. Therefore, in the early stages, various bionic jellyfish made from smart materials emerged, such as SMA (shape memory alloy), IPMC (ionic polymer metal composite), EMA (electromagnetic actuation), and other new materials used as propellers. However, due to the small deformation of smart materials, later developments led to the creation of bionic robot jellyfish made from mechanical materials. The most representative example is FESTO’s AquaJelly.
AquaJelly consists of a translucent hemisphere and eight propulsion tentacles. At the center of AquaJelly is a water-tight laser-sintered body. It is equipped with a central motor, two lithium polymer batteries, a charging control unit, and a servo motor.
Anyone who has seen its swimming posture in the water has been deeply impressed by its elegant “dance.”
3. Robot Lobster
The robot lobster was developed by Joseph A. Ayers for the U.S. Navy’s oceanographic center in the Northeast. The robot lobster possesses high flexibility and can be used for underwater mineral detection. This robot lobster is powered by a specially designed waterproof battery, and its two long antennae serve as highly sensitive waterproof antennas capable of detecting obstacles. Its eight legs allow it to move in any direction, all equipped with waterproof sensors, while its claws and tail help maintain stability in turbulent waters and other environments. Its brain is a microcomputer.
It can adapt to irregular seabeds like a real lobster, maneuvering agilely at various depths and skillfully handling turbulent waves and changing currents while avoiding various underwater rocks.

4. Robot Crab
The robot crab, named Crabster CR200, is a multi-jointed robot that was successfully developed in 2013 by the Korea Institute of Ocean Science and Technology and five universities in South Korea. Weighing about 600 kilograms, it is currently the largest deep-sea walking robot in the world, resembling a crab in appearance and operation.

The Crabster CR200 is capable of performing tasks that ordinary equipment finds challenging, such as underwater topography surveys and underwater pipeline installations. It can be operated by four personnel and can work at depths of up to 200 meters. Once submerged, it can collect various video data using ten cameras for an extended period, and its two front legs can also collect samples.

Compared to the large robot crab from South Korea, the Hexapod six-legged robot from Kondo Company in Japan is much smaller. This robot crab is powered by a 10.8V/800mAh battery and can not only navigate around obstacles using sensors but also perform various entertaining actions.

5. Robot Octopus
A project funded by the European Commission, the ICT-FET OCTOPUS project, was inspired by octopus morphology and observed the characteristics of octopus swimming. Michael Sfakiotakis and his collaborators designed a bionic robot octopus with eight arms made of two materials: flexible and rigid. It can perform arm strokes and flapping motions similar to a real octopus, using a propulsion method akin to that of jellyfish, also employing a jet propulsion mode.
6. Robot Snake
At this point, you might ask, isn’t a snake a land animal? How did it end up in the water? Actually, the robot snake I want to introduce is a remarkable amphibious robot snake that I was thrilled to see in a video. This robot snake, made in Japan, is named ACM-R5. When you first see ACM-R5, you might think it resembles the alien tentacles from Tom Cruise’s movie “War of the Worlds.”
ACM-R5 can glide underwater quite naturally, and it can also crawl, climb, and roll, essentially becoming a robotic giant snake. This eight-kilogram robot snake is powered by a lithium battery, and during operation, a remote operator sets a direction while a 32-bit microprocessor with sensors guides the actual underwater acrobatics and land terrain decisions. This robot snake will initially be used in humanitarian scenarios to help locate victims of disasters like earthquakes. However, I believe that weaponizing this robot is also an inevitable trend, potentially being used to carry explosives or assist soldiers in anti-terrorism operations.

7. Robot Butterfly
Next, we have the first of three astonishing products from the heavyweight German robotics company FESTO: a robot butterfly that can flutter in the air like a real butterfly. It can adjust itself through independently controlled wings and fly along a pre-programmed route. The robot butterfly is entirely blue, with a wingspan of 50 centimeters and a weight of only 32 grams. It has two motors that independently drive its wings, equipped with an IMU (Inertial Measurement Unit, which detects the acceleration signals of an object in the carrier coordinate system and the angular velocity signals relative to the navigation coordinate system, measuring the angular velocity and acceleration of an object in three-dimensional space, thus calculating its posture), and two 90mAh polymer batteries.
The wings of the robot butterfly use a carbon fiber skeleton covered with a thinner elastic capacitive membrane. It flaps its wings 1-2 times per second, reaching a top speed of 2.5m/s, and after flying for 3-4 minutes, it requires a 15-minute charge, so its endurance still needs improvement.

8. Robot Dragonfly
The robot dragonfly is another new type of robot developed by Germany’s FESTO. It can vibrate its wings in any direction in the air and hover. It features four wings made of foldable carbon fiber, capable of flapping 20 times per second, and we can control it via a smartphone, sending it to hard-to-reach areas. Although the robot dragonfly is lightweight, it is equipped with sensors, actuators, and other hardware, allowing it to fly in a unique manner.
All these components are installed in a compact space, fitting together precisely. The robot dragonfly has a wingspan of 63 centimeters and a body length of 44 centimeters, slightly larger than a real dragonfly.
Its similarity to real dragonflies lies in its ability to fly in any direction and execute the most complex flight strategies while maintaining excellent agility.
The success of the robot dragonfly is first reflected in its ability to complete flight tasks under all flight conditions of helicopters, conventional airplanes, and even gliders. Despite its complex structure, its highly integrated internal system can be controlled through a smartphone, making it remarkably easy to operate.

9. Robot Bird
The robot bird, developed by Germany’s FESTO, is another new type of robot named SmartBird. It can simulate birds gliding through the sky and flap its wings extremely realistically. This robot bird is inspired by the herring gull, weighing only 450 grams, with a wingspan of 1.96 meters, capable of flapping its wings based on the lever principle. It can also twist its body at certain angles, shake its tail and head to change direction.
The robot bird uses minimal materials and is lightweight, making its movement and flapping closely resemble that of a real bird, easily mistaken for an actual bird during flight.

10. Robot Bat
Scientists were inspired by nature to develop the idea of creating a robot bat. In the field of micro aerial vehicles (MAV), animals like bats, which perform flapping flight, are the most effective micro flying machines. This robot bat, developed by researchers at North Carolina State University, is the size of a human palm and serves as an excellent micro flying machine for reconnaissance or information gathering. Its joints are made of shape memory alloys, and its muscles are composed of smart material alloys. These alloys possess exceptional elasticity, allowing the robot bat to perform a full range of movements while always returning to its original gliding state.

11. Robot Fly
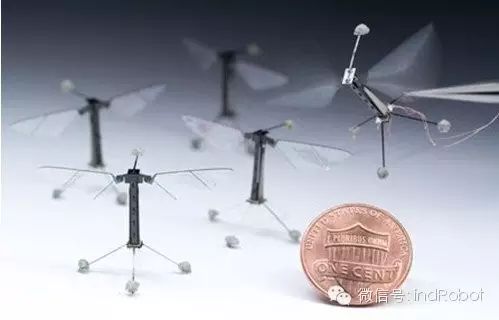
The robot fly is a bionic robot modeled after flies. In May 2013, Harvard University developed the world’s first robot fly. The main body of the robot fly is made of carbon fiber, weighing only 80 milligrams, with a wingspan of 3 centimeters. While flying, it flaps its wings 120 times per second, with a frequency nearly matching that of real flies, so fast that it is almost invisible to the naked eye, and it can hover and accelerate along a pre-set route.
In laboratory flight tests, the robot fly demonstrated stable and controllable flight performance, capable of continuous flight for over 20 seconds. Its power consumption during flight is approximately 19 milliwatts, roughly equivalent to that of a real fly.
The Pentagon has always placed great importance on the robot fly, which is expected to become a “miniature spy.” Since the research began in 1998, it has received substantial funding. The military envisions that robot flies could assist in reconnaissance missions in Afghan caves or locate secret weapons in Iraq.
In future warfare, robot flies could even carry miniature explosives, flying into enemy headquarters to eliminate commanders or destroy all instruments in their command centers. In short, robot flies will accomplish tasks that were beyond the reach of past “007” missions, becoming genuine super spies.
In the future, robot flies will be equipped with numerous sensors and miniature cameras, enabling them to perform many tasks, such as detecting forest fires, searching for survivors in disaster areas, and playing significant roles in space exploration. Imagine that as the capabilities and stability of robot flies improve, the days of quadcopters may become increasingly challenging.
12. Conclusion
In 1936, science fiction writer Raymond Gruen described a beetle robot in the magazine Weird Tales. Gruen wrote: “The scarab beetle rubs its hind legs together, even when the fly is not flying. When feeling comfortable, it unfolds its wings and the elytra. It buzzes, and an unsuspecting person might mistake it for a real beetle…”
After hundreds of millions of years of evolution and development, the organisms on Earth have evolved a series of body structures and behavioral characteristics adapted to their survival environments, enabling them to thrive in complex and variable environments. Many of our inspirations for robot manufacturing come from this.

In military applications, one of the important capabilities that robots need to address is concealment. For bionic robots, their appearance and movement patterns closely resemble those of real biological organisms, allowing them to achieve perfect concealment in enemy surveillance. In fact, as early as 2007, a group of bizarre flying objects hovered over an anti-war demonstration, leading to accusations against the U.S. government of secretly developing insect drones. Official denials and entomologists insisted they were merely dragonflies, but this did not quell public speculation.
In the following year, the U.S. Air Force unveiled the mystery of insect-sized spy planes, claiming they were “as small as bumblebees,” difficult to detect, and could fly into buildings to “take photos, record audio, and even attack insurgents and terrorists.” The U.S. Department of Defense’s Advanced Research Projects Agency has long been researching design proposals for nano-bionic micro-drones. Researchers are now developing bionic drones with insect eyes, bat ears, bird wings, and even bee hairs to detect biological, chemical, and nuclear weapons.
Although the prospects for bionic robots becoming machine spies are vast, achieving the goal of “sneaking in quietly, gathering intelligence silently” and truly breaking through air defense networks remains a significant challenge:
Challenge 1: Endurance
Due to the small size of spy robots, the volume and capacity of the batteries they carry are limited, resulting in short swimming or flying times and small effective payloads. Future use of fuel cells or next-generation battery technologies, or utilizing body antennas to receive microwave energy transmitted from the ground, could extend the range of drones. However, to become true spy drones, breakthroughs in technology are still necessary.
Challenge 2: Maintaining Course
Spy robots are small and slow, with almost no inertia, making them easily influenced by unstable water flows and air currents. In such cases, maintaining their course and executing commands from operators presents a significant control challenge.
Challenge 3: Long-Distance Communication
Moreover, to execute reconnaissance or espionage missions, spy robots must carry various reconnaissance sensors, such as visual systems, auditory systems, and biochemical detectors. These must all be ultra-lightweight micro-sensors, making miniaturization a key development in sensor technology. Additionally, once submerged or airborne, spy robots must maintain communication with their operators, and the attenuation of wireless signals during transmission, especially underwater, poses another major challenge for the future development of spies.
However, with the rapid advancement of science and technology, perhaps in a few years, the cockroach climbing next to you or the fly entering your room could be spies listening and watching; maybe when you hear the bird singing on the wire outside your window, it might just be a robot aiming a camera at you!