The potential of micro smart vehicles comes from their small size, low power consumption, and ability to perform simple tasks independently or collaborate in groups to complete more complex tasks. Here are some micro robots that can autonomously move, crawl, or fly.
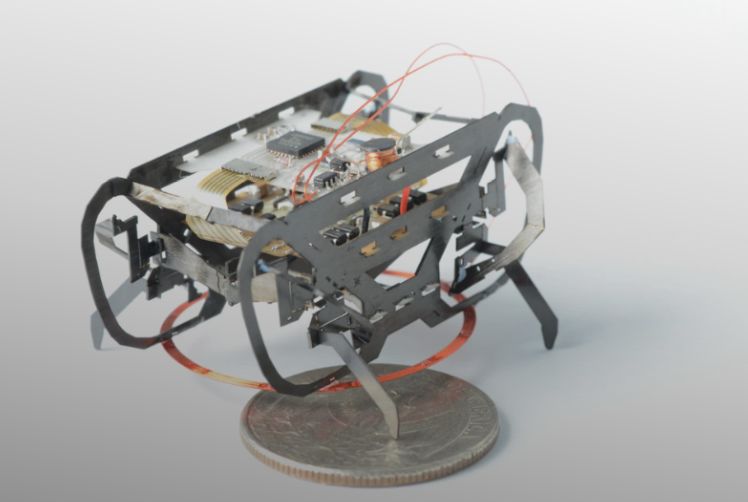
Micro crawling robot powered by radio energy

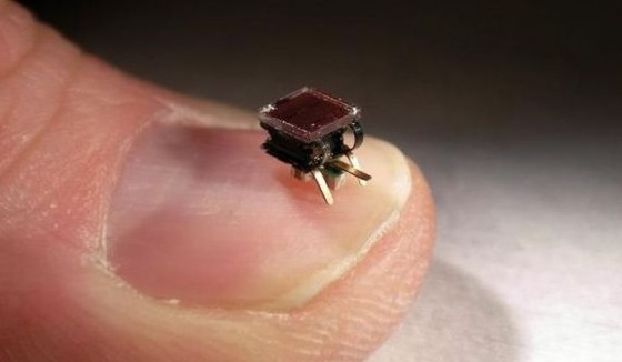
Robot navigated by sound and powered by a button battery
The world’s smallest programmable robot driven by antimagnetic micro-operation
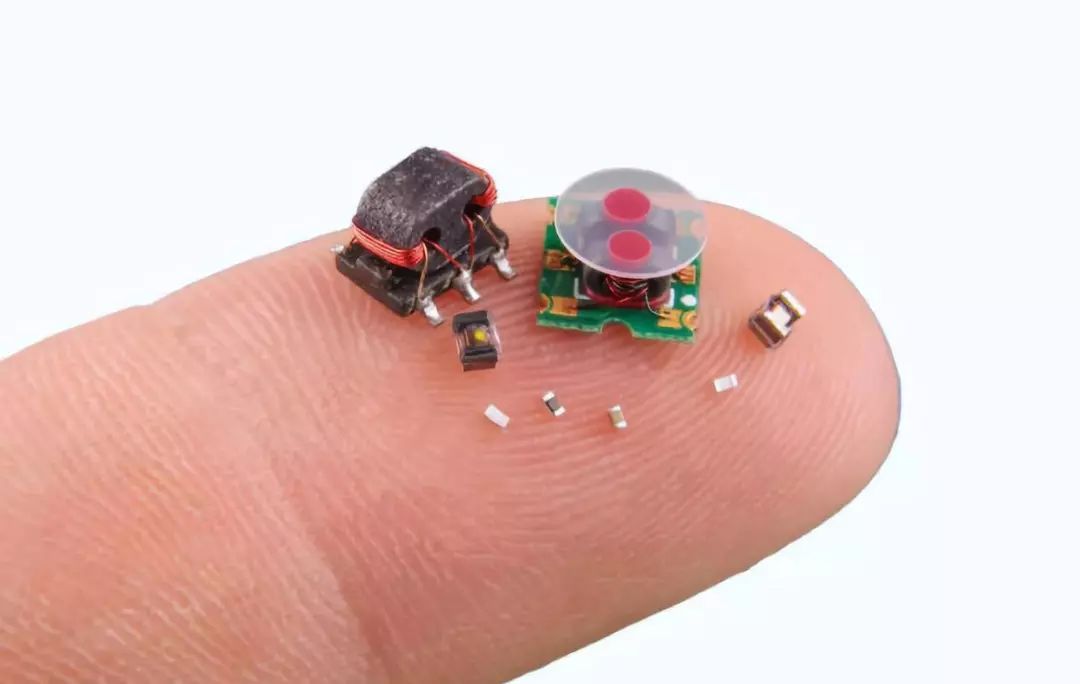
Smallest robot components above

Harvard University’s Kilobot micro robot
A hundred Kilobots moving relative to each other

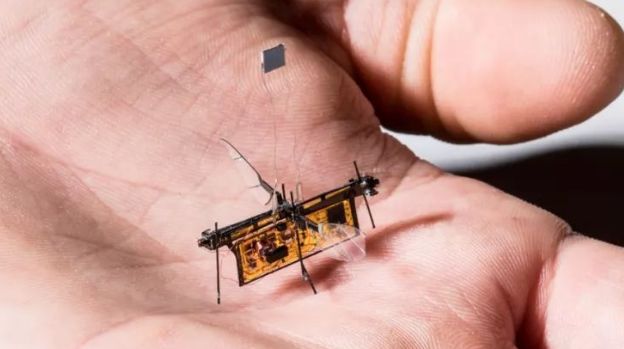
Flying insect robot developed by Dutch scientists
Flying robot developed by the US military, slightly larger

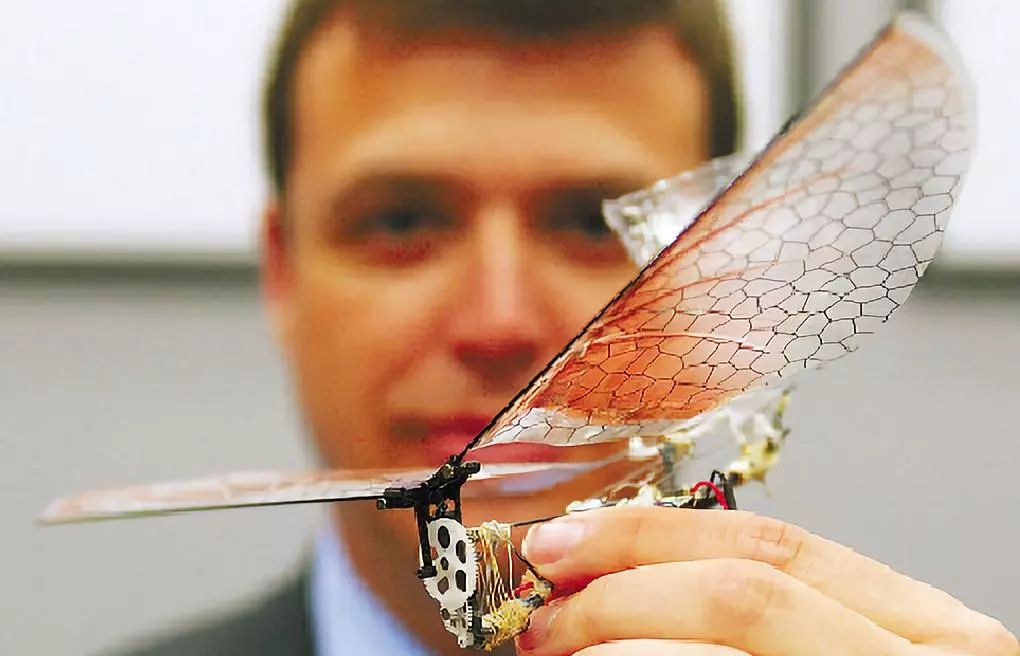
Bionic flapping wing flying robot

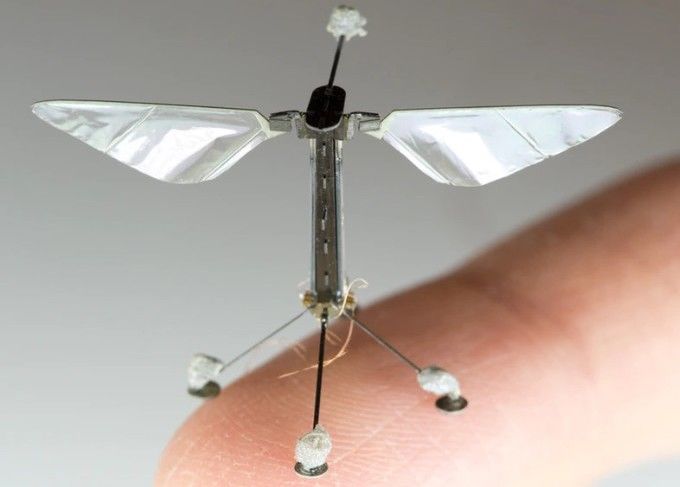
Piezoelectric ceramic-driven flapping wing flying robot
Flying robot powered by photovoltaic cells
Flying robot powered by laser

Flapping gliding flying robot

US bumblebee flying robot
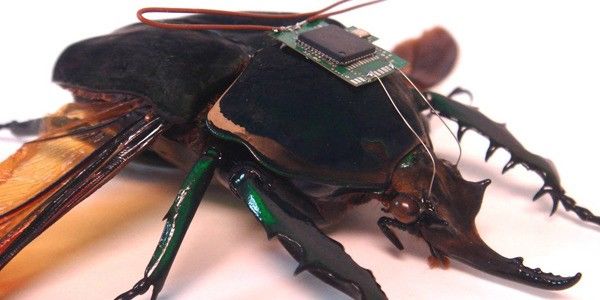
Biological robot (Cyborg) with electronic control devices

By sending stimulation signals to the cockroach through antennas attached to it, movements such as walking and turning can be controlled, allowing the cockroach to walk along a designated route.

The control device on this cockroach has three microphones in different directions, which can probe the direction of sound, thus controlling the cockroach to move towards the direction of the sound.

Cockroaches and moths equipped with electronic control circuits.They can relay environmental information to a data center through relay communication.
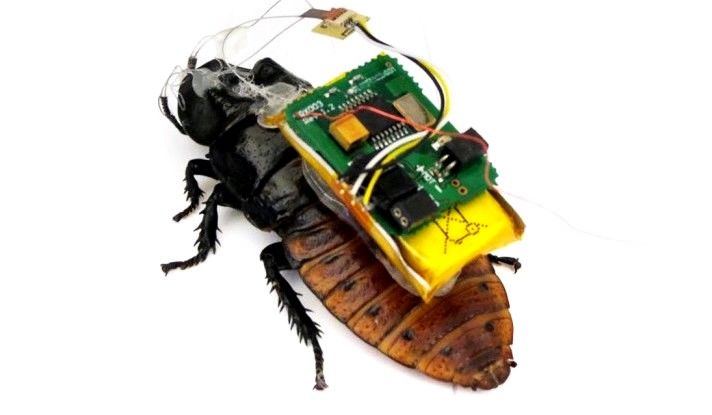
Cyborg – Cockroach
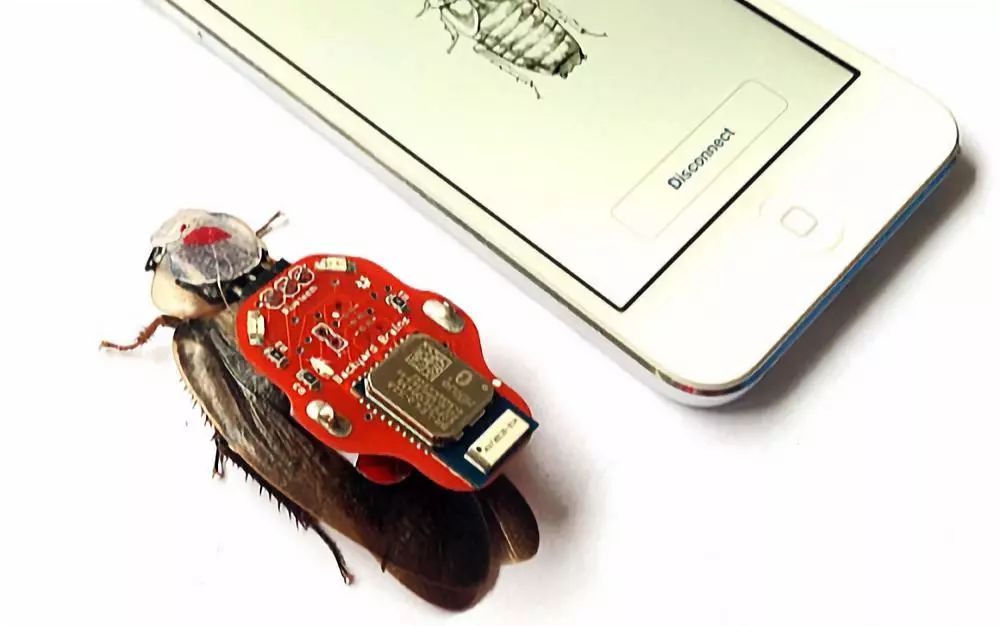
Smartphone-controlled cockroach
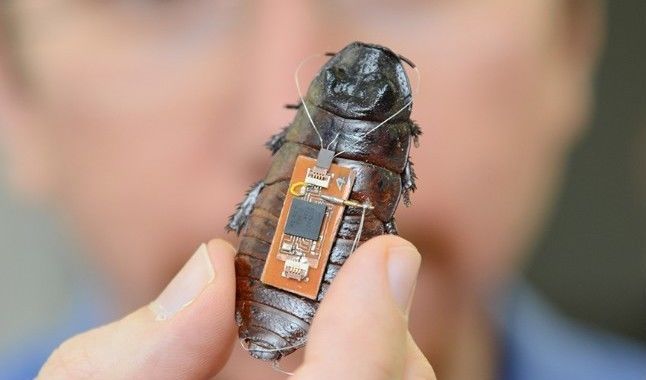
Cyborg Cockroach

Cyborg Moth
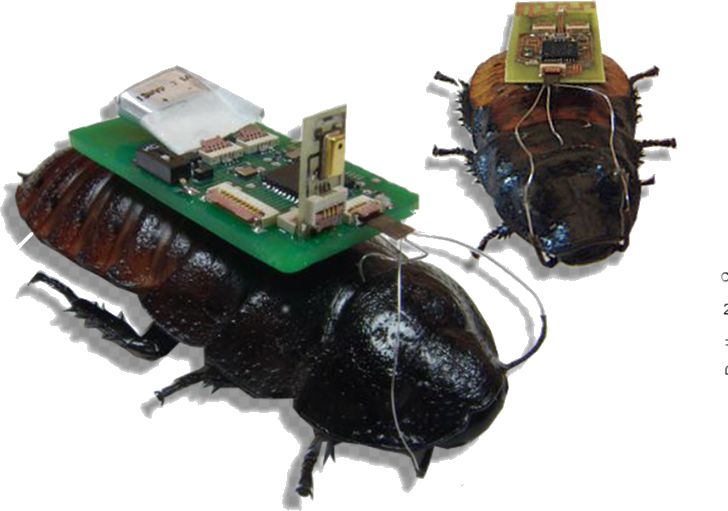
Collaborative electronic cockroaches

Controlled morning glory beetle

A Cyborg based on a dragonfly, called DragonflEye

The electronic backpack, the size of a fingernail, attached to the dragonfly contains a circuit board, sensors, and solar cells, serving as an information relay station between humans and dragonflies.
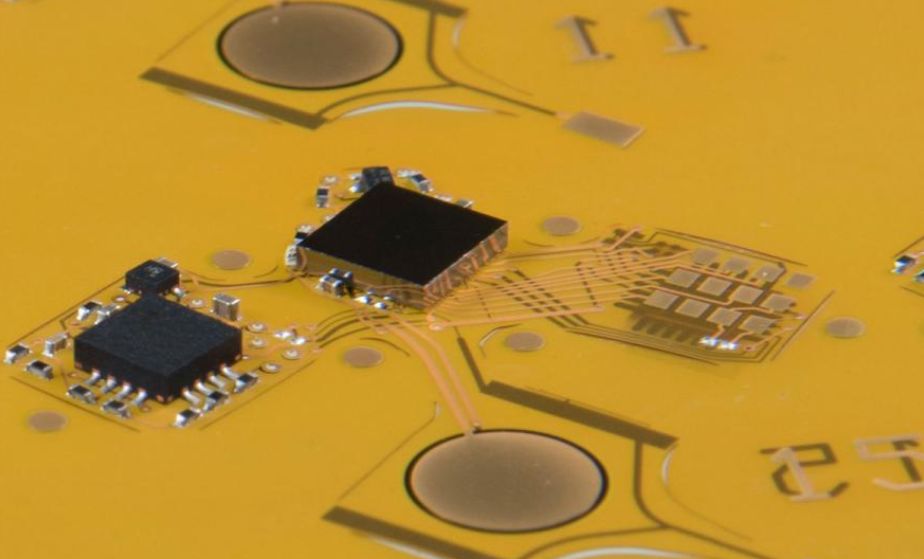
Micro circuits on the electronic backpack
Contestant Message
Hello Zhuo, I am a contestant from last year’s Optoelectronic Innovation Group. I have two small suggestions regarding this year’s Optoelectronic Innovation Group.
First, I hope we can improve the computing power. In the post-test, our system considered robustness and did not use the pure predictive algorithm l1controller, but instead used a more complex path planning, allowing the vehicle to selectively stop, reverse, etc., when encountering obstacles, which greatly increased the computing power requirement.
In recent tests of visual SLAM algorithms (based on SGBM or SSD), I found that after running laser SLAM PCL and path planning simultaneously, the image processing rate was very low (monocular 2.9fps, binocular 2.1fps), which is far from usable levels. Visual algorithms are necessary for handling complex road conditions.
On the other hand, I think the track elements can incorporate some elements closer to actual road conditions. I believe that as the only group equipped with an industrial control computer, we are also the group closest to smart vehicles, and the robustness and flexibility of the algorithms are also very important.
During the competition, many groups lost control of their vehicles when they collided with obstacles and could not continue to operate. I think we could add obstacles that move left and right on the track, making it more realistic.
I heard rumors that the Optoelectronic Innovation Group wants to reduce computing power and use the NXP i.MX series processors, simplifying algorithms for contestants just to run faster on the existing track. I believe the Optoelectronic Innovation Group should make the track more complex and increase computing power to enhance flexibility.
The current framework of the Optoelectronic Innovation Group’s ROS + PCL (+ computer vision) is also quite close to current industry explorations.
We should not blindly pursue speed; it is more important to run faster under complex road conditions to truly resemble a “smart vehicle”!
