Skip to content
In 1959, Richard Feynman delivered a lecture titled “There’s Plenty of Room at the Bottom,” which had a significant impact on the future development of nanotechnology. Micro-robots are an important branch of nanotechnology. Although they differ from conventional robots in composition, structure, and application, they share certain commonalities in their definition as semi-autonomous or fully autonomous machines, possessing basic features such as perception and decision-making. They can assist or even replace humans in efficiently completing dangerous, arduous, and complex tasks, thereby expanding the range of human activities and capabilities. Micro-robots have enormous application potential in biomedical and environmental remediation fields. However, the movement of small robots differs from that of traditional macro-scale robots; due to the significantly reduced Reynolds number, movement and actuation become challenging. As the characteristic size of robots decreases from macro to micro-nano scales, the effects of adhesion and friction become more pronounced, while the influence of gravity can be neglected.
Powered by energy sources such as chemical fuels, magnetic fields, electric fields, ultrasonic fields, and optical fields, micro-robots can overcome the fluid viscosity and friction that hinder their movement efficiency, actively moving to specific areas at controllable speeds and maneuverability. Most practical applications require micro-robots to operate in more viscous environments than those tested on laboratory workbenches. This greatly limits the practical applications of micro-robots. Therefore, there is a significant gap between the current research status and practical applications, especially in terms of in vivo targeted delivery. Due to limited driving forces, researchers are focusing on enhancing the maneuverability of micro-robots in viscous fluids (such as blood, mucus, ionic media, and oil-water mixtures) to promote their clinical and environmental applications.
In nature, various species can reduce resistance by rationally designing surface structures and compositions. For example, the water strider, known as the pond skater, can stand and glide freely on water due to the directional micro-hairs on its legs that trap a significant amount of air. Despite their large size, sharks move swiftly and agilely because the dermal denticles on their skin are closely aligned parallel to the local flow direction of the water, helping to reduce water resistance. Earthworms can crawl through soil without damaging their surface tissues, as the mucus dynamically secreted on their surfaces reduces motion friction. Therefore, surface modification and structuring are essential means to reduce surface adhesion and friction between micro-robots and their surrounding environments. It can also enhance liquid slip on the robot’s surface, thereby improving the mobility of micro-robots. In recent years, researchers have developed a series of micro-robots ranging from single robots to robotic swarms, benefiting from rational surface design and functionalization (Figure 1), which makes micro-robots promising for controlled delivery in highly viscous in vivo environments and sludge wastewater remediation.
Recently, Dr. Ben Wang from Shenzhen University, Professor Li Zhang from the Chinese University of Hong Kong, Professor Zhiguang Guo from Hubei University, Professor Martin Pumera from Brno University of Technology, Professor Xuechang Zhou from Shenzhen University, and Academician Weimin Liu from the Institute of Chemistry and Physics, Chinese Academy of Sciences published a review titled “Small-scale robotics with tailored wettability” in Advanced Materials . This review focuses on the current progress and future prospects of micro-robots with hydrophilic and hydrophobic modifications (including tethered and untethered robots). It summarizes the characteristics and advantages of micro-robots after hydrophilic and hydrophobic surface modifications in terms of actuation, imaging, and biocompatibility, and outlines their potential applications. The review summarizes the cutting-edge applications of micro-robots in biomedical and environmental fields and discusses the challenges and prospects of micro-robots. Figure 2 presents a timeline of some significant achievements in the fields of wettability and micro-robots. The first author of the article is Dr. Ben Wang, and the corresponding authors are Professor Li Zhang, Professor Zhiguang Guo, and Professor Martin Pumera.
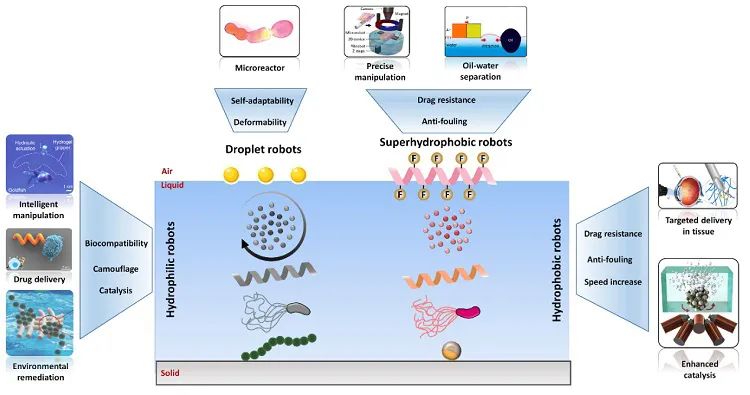
Figure 1. Tethered and untethered micro-robots achieve different functions and applications through various hydrophilic and hydrophobic surface functionalizations.
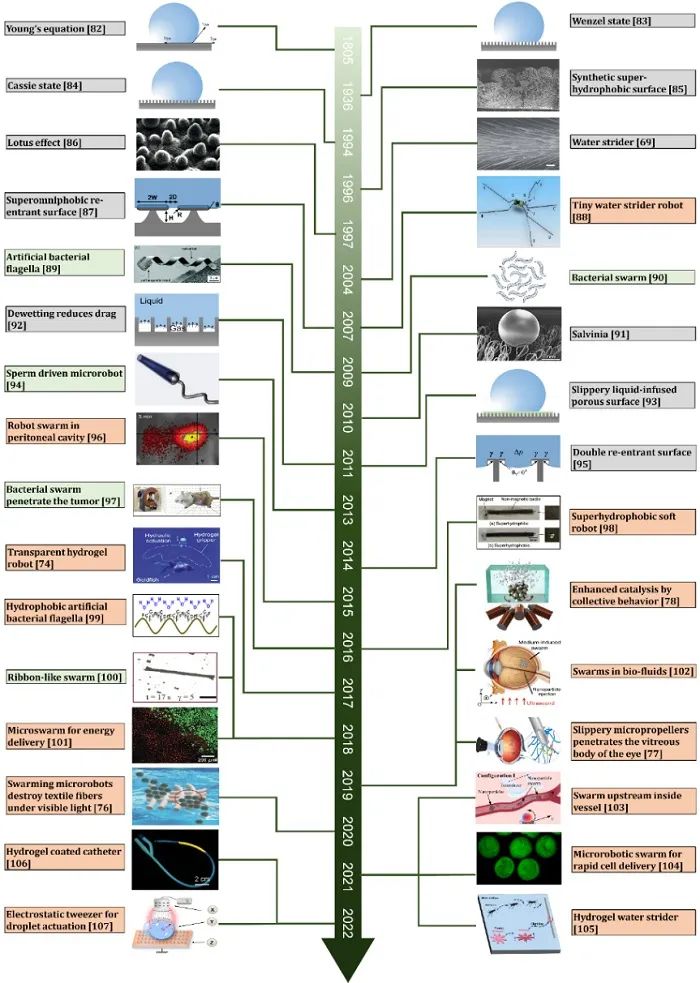
Figure 2. Some significant advances in the field of wettability and micro-robots.
Figure 3 summarizes the roles and characteristics of hydrophobic and hydrophilic surface modifications of micro-robots, considering aspects such as actuation, imaging, biocompatibility, and applications. To meet the needs of practical applications, micro-robots must navigate various viscous liquids and biological barriers in a controllable manner, rather than being limited to concept verification in diluted low-viscosity and stagnant fluid environments. Currently, there are still some challenges in the research of surface functionalization and modification of small robots. First, if robots are used for biomedical applications, especially in vivo applications, not only the biocompatibility of the robot’s material must be considered, but also the toxicity and biocompatibility of the graft layer and potential metabolites. Fluorinated molecules can impart high hydrophobicity and low resistance to the robot’s surface. However, fluorinated molecules exhibit poor biocompatibility. Therefore, optimizing both motion resistance and biocompatibility presents a challenge. Second, hydrophobic modifications have been shown to enhance tissue penetration in some cases. However, prolonged operation of robots in vivo may lead to contamination of the surface by proteins, electrolytes, and small organic compounds, resulting in a decline and loss of drag reduction capabilities. Third, when the robot’s surface is modified to be superhydrophobic, the water contact angle is typically greater than 150°, and due to the low density of trapped air, the robot may float on the water medium. The target navigation of micro-robots may be limited to the air-water interface. To overcome these challenges, future research may focus on the following aspects. First, previous studies have reported that both hydrophobic and hydrophilic modifications can reduce interfacial friction. Future research can further clarify the effects of both modification methods on interfacial drag reduction and lubrication while identifying their respective applicable scenarios. Second, micro-robots with hydrophobic surface modification characteristics reduce resistance, particularly in viscous media. Therefore, developing biocompatible and biodegradable hydrophobic robots for in vivo applications is an important research direction, especially in deep tissue delivery and overcoming viscous body fluids such as mucus and gel-like tissues (e.g., brain gliomas). Third, the superhydrophobic surfaces of micro-robots exhibit solid-liquid-gas three-phase contact, which has been shown to effectively promote certain catalytic reactions. The constructed three-phase microenvironment can broaden the types of catalytic reactions based on micro-robots, paving the way for exploring novel chemically driven micro-robots and accelerating catalytic performance in environmental remediation and biomedical applications.
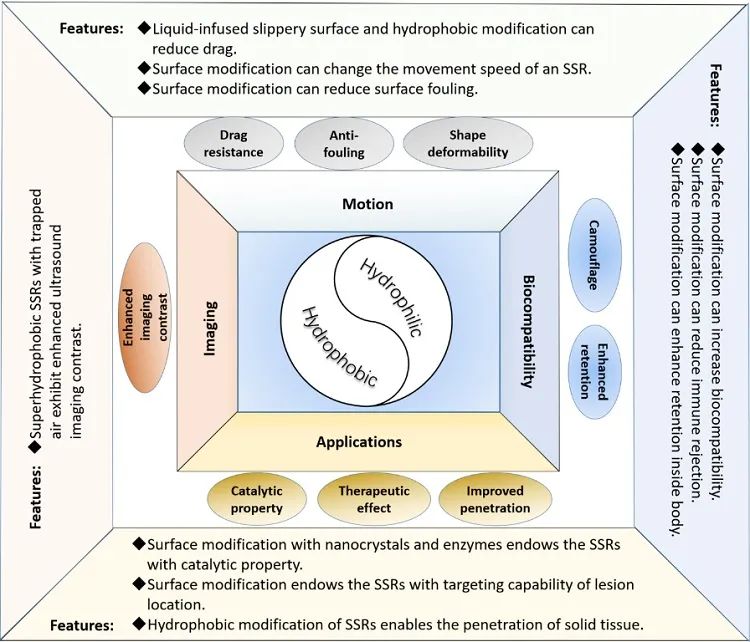
Figure 3. Summary of the roles and characteristics of hydrophobic and hydrophilic modifications of micro-robots from aspects such as actuation, imaging, biocompatibility, and applications.
Original text (Scan or long press the QR code to recognize and access the original text page):
Small-scale Robotics with Tailored Wettability
Ben Wang, Stephan Handschuh-Wang, Jie Shen, Xuechang Zhou, Zhiguang Guo, Weimin Liu, Martin Pumera, Li Zhang
Adv. Mater., 2022, DOI: 10.1002/adma.202205732
http://www.cuhklizhanggroup.com/
https://chem.szu.edu.cn/szdw/jxdanwe/hxx/tpfyjy/wb.htm
http://www.licp.cas.cn/gzg/
http://www.licp.cas.cn/rcjy/zgjgwry/liuwm/
https://www.x-mol.com/university/faculty/16698
https://www.x-mol.com/university/faculty/91988