Background and Overview
Sensor is an important part of the Internet of Things (IoT), “Sensors to IoT” is equivalent to “eyes to humans.” Without eyes, humans cannot see this vast world, and without sensors, IoT cannot perceive the ever-changing world.
Currently, there are many sensors developed for IoT, including Accelerometers, Magnetometers, Gyroscopes, Ambient Light Sensors, Proximity Sensors, Barometers, Humidometers, etc. Major semiconductor manufacturers around the world produce these sensors, which increases market options but also complicates application development. Different sensor manufacturers and types require their unique drivers to operate, which increases the development difficulty as applications must adapt to different sensors. To reduce application development difficulty and increase the reusability of sensor drivers, we designed the Sensor Driver Framework.
The function of the Sensor Driver Framework is to provide a unified operation interface for the upper layer, improving the reusability of upper-layer code; simplifying the difficulty of lower-level driver development, allowing sensors to be registered in the system by implementing simple ops (operations).
Overall Framework
The overall architecture diagram of the Sensor Driver Framework is as follows:
 sensor
sensor
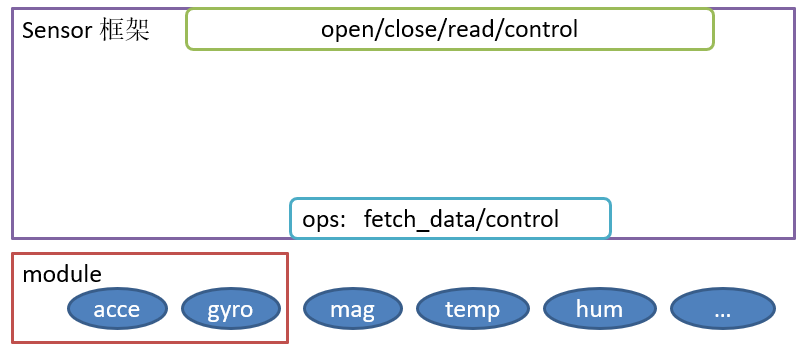
It provides a standard device interface for the upper layer <span>open/close/read/write/control</span> and a simple ops interface for the lower-level driver:<span>fetch_data/control</span>. The framework also supports modules, providing services for coupled sensor devices at the lower level.
Working Principle
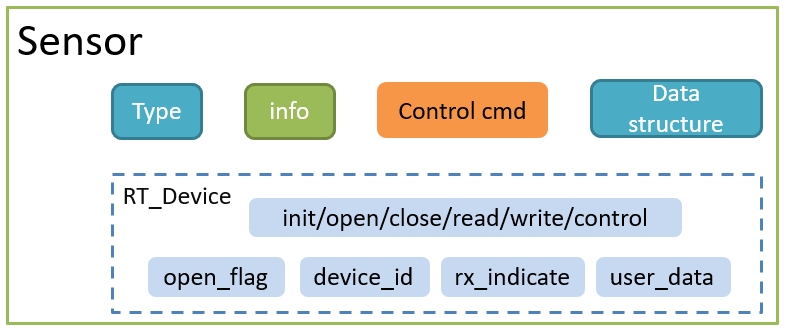
The Sensor device is actually an enhancement of the standard device <span>rt_device</span>, adding unique attributes and control commands specific to sensors, as shown in the figure below:
 sensor
sensor
The entire Sensor device consists of two parts:
-
Inherits some characteristics from the standard device, including: standard control interface,
<span>callback function</span>,<span>device_id</span>, etc. -
Unique parts of the Sensor device include:
<span>Sensor type</span>,<span>related information</span>,<span>unique control commands</span>,<span>ops</span>, and some<span>data structures</span>.
Structure of Sensor
The structure of the Sensor device is as follows:
struct rt_sensor_device
{
struct rt_device parent; /* The standard device */
struct rt_sensor_info info; /* The sensor info data */
struct rt_sensor_config config; /* The sensor config data */
void *data_buf; /* The buf of the data received */
rt_size_t data_len; /* The size of the data received */
const struct rt_sensor_ops *ops; /* The sensor ops */
struct rt_sensor_module *module; /* The sensor module */
};
typedef struct rt_sensor_device *rt_sensor_t;
Sensor Information
The struct rt_sensor_info info stores information related to the Sensor itself, provided during the registration of the Sensor device, and its content should not be modified during use. The specific members are as follows:
struct rt_sensor_info
{
rt_uint8_t type; /* The sensor type */
rt_uint8_t vendor; /* Vendor of sensors */
const char *model; /* model name of sensor */
rt_uint8_t unit; /* unit of measurement */
rt_uint8_t intf_type; /* Communication interface type */
rt_int32_t range_max; /* maximum range of this sensor's value. unit is 'unit' */
rt_int32_t range_min; /* minimum range of this sensor's value. unit is 'unit' */
rt_uint32_t period_min; /* Minimum measurement period,unit:ms. zero = not a constant rate */
rt_uint8_t fifo_max; /* Maximum depth of fifo */
};
Currently, the Sensor types are limited to the following, and if new sensor types are available, a PR can be submitted to add them.
#define RT_SENSOR_CLASS_ACCE (1) /* Accelerometer */
#define RT_SENSOR_CLASS_GYRO (2) /* Gyroscope */
#define RT_SENSOR_CLASS_MAG (3) /* Magnetometer */
#define RT_SENSOR_CLASS_TEMP (4) /* Temperature */
#define RT_SENSOR_CLASS_HUMI (5) /* Relative Humidity */
#define RT_SENSOR_CLASS_BARO (6) /* Barometer */
#define RT_SENSOR_CLASS_LIGHT (7) /* Ambient light */
#define RT_SENSOR_CLASS_PROXIMITY (8) /* Proximity */
#define RT_SENSOR_CLASS_HR (9) /* Heart Rate */
#define RT_SENSOR_CLASS_TVOC (10) /* TVOC Level */
#define RT_SENSOR_CLASS_NOISE (11) /* Noise Loudness */
#define RT_SENSOR_CLASS_STEP (12) /* Step sensor */
The other members include vendor, model (e.g., “mpu6050”), unit of sensor data, communication interface type, maximum measurement range, minimum measurement range, minimum measurement period, and maximum depth of hardware FIFO.
Sensor Configuration
The Sensor Driver Framework abstracts some common configuration options, which are placed in <span>struct rt_sensor_config</span>, with the following members:
struct rt_sensor_config
{
struct rt_sensor_intf intf; /* sensor interface config */
struct rt_device_pin_mode irq_pin; /* Interrupt pin, The purpose of this pin is to notification read data */
rt_uint8_t mode; /* sensor work mode */
rt_uint8_t power; /* sensor power mode */
rt_uint16_t odr; /* sensor out data rate */
rt_int32_t range; /* sensor range of measurement */
};
Among these configuration items, intf and irq_pin are abstracted to decouple the sensor from the hardware. By passing the parameter <span>struct rt_sensor_config</span> during lower-level initialization, the communication interface decoupling is completed.
struct rt_sensor_intf
{
char *dev_name; /* The name of the communication device */
rt_uint8_t type; /* Communication interface type */
void *user_data; /* Private data for the sensor. ex. i2c addr,spi cs,control I/O */
};
Other configuration items are controlled by specific sensor control commands, as follows:
#define RT_SENSOR_CTRL_GET_ID (0) /* Read Device ID */
#define RT_SENSOR_CTRL_GET_INFO (1) /* Get Device Info */
#define RT_SENSOR_CTRL_SET_RANGE (2) /* Set Sensor Measurement Range */
#define RT_SENSOR_CTRL_SET_ODR (3) /* Set Sensor Data Output Rate, unit is HZ */
#define RT_SENSOR_CTRL_SET_MODE (4) /* Set Work Mode */
#define RT_SENSOR_CTRL_SET_POWER (5) /* Set Power Mode */
#define RT_SENSOR_CTRL_SELF_TEST (6) /* Self-test */
Using these with the control interface in ops allows for sensor configuration.
Storage of Sensor Data
To facilitate data parsing, it is specified that each type of Sensor has its unique data structure, with members using <span>union</span> to reduce code size.
/* 3-axis Data Type */
struct sensor_3_axis
{
rt_int32_t x;
rt_int32_t y;
rt_int32_t z;
};
struct rt_sensor_data
{
rt_uint32_t timestamp; /* The timestamp when the data was received */
rt_uint8_t type; /* The sensor type of the data */
union
{
struct sensor_3_axis acce; /* Accelerometer. unit: mG */
struct sensor_3_axis gyro; /* Gyroscope. unit: mdps */
struct sensor_3_axis mag; /* Magnetometer. unit: mGauss */
rt_int32_t temp; /* Temperature. unit: dCelsius */
rt_int32_t humi; /* Relative humidity. unit: permillage */
rt_int32_t baro; /* Pressure. unit: pascal (Pa) */
rt_int32_t light; /* Light. unit: lux */
rt_int32_t proximity; /* Distance. unit: centimeters */
rt_int32_t hr; /* Heat rate. unit: HZ */
rt_int32_t tvoc; /* TVOC. unit: permillage */
rt_int32_t noise; /* Noise Loudness. unit: HZ */
rt_uint32_t step; /* Step sensor. unit: 1 */
} data;
};
Unique Ops
The ops (operation functions) include two function pointers, one for fetching sensor data (fetch_data) and the other for controlling the sensor through control commands (control).
struct rt_sensor_ops
{
rt_size_t (*fetch_data)(struct rt_sensor_device *sensor, void *buf, rt_size_t len);
rt_err_t (*control)(struct rt_sensor_device *sensor, int cmd, void *arg);
};
Registration Method
The sensor driver framework provides a Sensor registration function, allowing the registration of a sensor device by passing the Sensor control block, name, flag, and private data.
int rt_hw_sensor_register(rt_sensor_t sensor,
const char *name,
rt_uint32_t flag,
void *data);
Thus, the Sensor Driver Framework relies on the standard device framework, and as long as the sensor driver interfaces with the Sensor’s ops and calls the <span>rt_hw_sensor_register</span> function to register as a Sensor device, it can control the sensor through the standard device interface.
Module Support
The definition of module is to solve the coupling issue of two sensors at the lower level; some sensors have both accelerometer and gyroscope functionalities, and their FIFO is shared. In FIFO mode, both types of sensor data can only be read simultaneously, indicating that their data is coupled.
To address this issue, we define the module type:
struct rt_sensor_module
{
rt_mutex_t lock; /* The module lock */
rt_sensor_t sen[RT_SENSOR_MODULE_MAX]; /* The module contains a list of sensors */
rt_uint8_t sen_num; /* Number of sensors contained in the module */
};
This contains pointers to the control blocks of coupled sensor devices, allowing simultaneous updates of the accelerometer value while reading the gyroscope data, thus resolving the coupling issue at the lower level.
Previous Recommendations:
1. 50 Million Yuan Funding for Major Chip Technology Projects, RT-Thread Assessment Indicators
2. Promoting Efficient Development of IoT, RT-Thread Launches IoT Sensor Logo Program
3. RT-Thread Learning Notes for Community Newcomers — Thread Management
4. RT-Thread Learning Notes for Community Newcomers 2 — Clock Management
5. Xiong Puxiang: 2019, Go RT-Thread!

Join the RT-Thread Sensor Technology Group
From now on, add Xiao Shimei (WeChat: RT-Thread2006) with the note “Name + Company”. After passing the review, you can join the “Sensor Professional Technology Group”. Joining the group allows you to:
a. Receive support for sensor driver development-related queries from the RT-Thread official team
b. Get early access to sensor driver development materials/tutorials, and have the opportunity to participate in sensor-related activities
c. Meet more partners in the sensor industry, directly communicate with industry leaders, and build connections
d. Enjoy occasional RT-Thread community benefits waiting for you~

When adding friends, please note “Name + Company”

RT-Thread
Make the development of IoT terminals simple and fast, maximizing the value of chips.Apache2.0 protocol, can be used for free in commercial products without the need to disclose source code, no potential commercial risk.
Long press the QR code to follow us
 Click “Read Original” to enter the RT-Thread Sensor Logo Program!
Click “Read Original” to enter the RT-Thread Sensor Logo Program!
