
Introduction
The design inspiration for multi-segment robots comes from multi-legged animals in nature. What advantages do these robots have compared to traditional forms?
Professor Robert J. Wood from Harvard University’s Microbotics Lab has introduced a segmented multi-legged micro-robot, with a related paper titled “Myriapod-like ambulation of a segmented microrobot”.
This micro-robot uses piezoelectric dual-plates as its drive mechanism, measuring 3.5 * 3.5 cm and weighing 750 mg. Compared to conventional hexapod micro-robots, this type of robot has potential advantages in climbing, achieving multifunctionality, and stability.
Advantages of Multi-Segment Robot Movement
The design inspiration for multi-segment robots comes from multi-legged animals in nature. The advantages of these robots compared to traditional forms are reflected in:
1. Speed: While insects like cockroaches and other hexapods can move up to 40-50 times their body length per second, centipedes can move about 10 times their body length per second. However, centipedes are still among the most agile crawling insects, capable of capturing cockroaches and even larger insects and mammals. In addition to using their limbs to amplify stride length, the inherent flexibility of centipede limbs allows them to move freely on flat surfaces, enabling centipede micro-robots to advance and change direction more quickly than traditional rigid hexapod robots of the same size on rugged terrain.
2. Movement Stability: Known as hundred-leg insects, centipedes have a large number of legs (with certain species having up to 191 legs), which manifests in a rich variety of gaits and increased movement stability.
3. High Movement Sensitivity and Robustness: Research experts have found that when a certain number of legs are removed from a centipede, its movement capabilities (including gait, speed, and stability) change little, indicating that multi-segment robots may exhibit robustness to failures. Thanks to the flexibility of their limbs, centipedes can transition from horizontal to vertical surfaces without significant changes in gait. Therefore, as the number of segments in this type of robot increases, its movement becomes more sensitive.
4. Versatility: By adding or removing segments from the centipede robot, it can better perform different tasks and adapt to various situations.
However, the current challenges in manufacturing this type of robot lie in the size differences and processing errors of micro-robots, which make their movements difficult to predict. Additionally, wiring is generally done by hand, which is time-consuming and unreliable. To address these issues, the authors propose a wiring method in this study and create a corresponding dynamic model, achieving a close prediction of the robot’s movement through prototype experiments.
Design and Working Principle of the Piezoelectric Dual-Plate Multi-Legged Robot
Compared to piezoelectric actuators (PEA) and shape memory alloy (SMA) actuators, the frequency bandwidth of shape memory alloy actuators is lower than that of piezoelectric actuators, limiting the stepping excitation frequency of micro-robots. Therefore, in this study, the multi-legged robot uses piezoelectric dual-plates as actuators, arranged in vertical and horizontal directions to achieve forward/backward movement of the legs and the stepping motion of raising/lowering the driving legs.
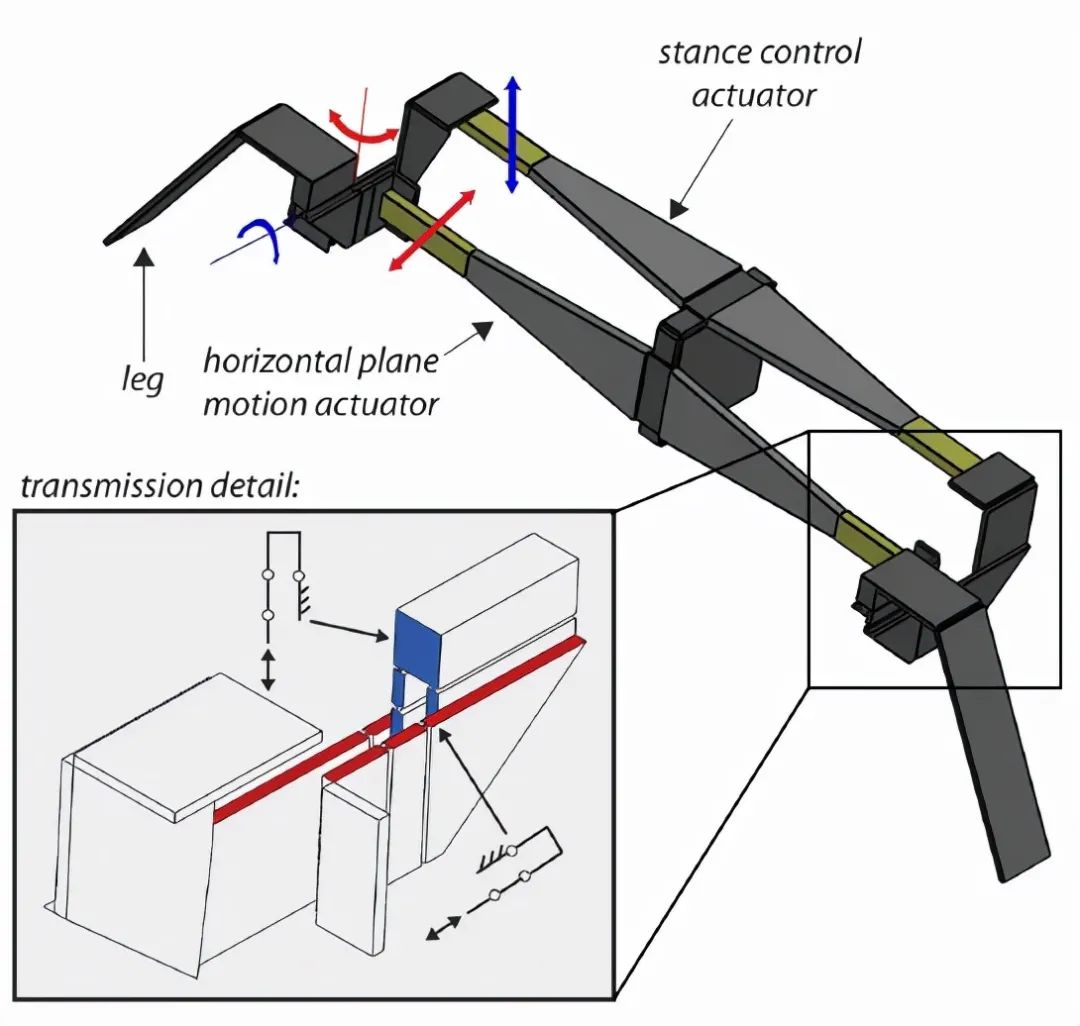 Figure | Configuration of a single-segment multi-legged robot (Source: Robert J. Wood)
Figure | Configuration of a single-segment multi-legged robot (Source: Robert J. Wood)
The multi-segment robot consists of multiple single-segment robots, connected by a Sarrus mechanism. The Sarrus mechanism is a classical mechanical mechanism invented in 1853 by French mathematician Pierre Frederic Sarrus.
This mechanism can convert limited circular motion into linear motion, allowing linear motion to be transformed into standard rotational motion. The Sarrus mechanism is a spatial mechanism, sometimes referred to as a “spatial crank mechanism.” It can achieve the transformation of devices from spatial mechanisms to planar mechanisms through changes in its configuration, significantly reducing the space it occupies.
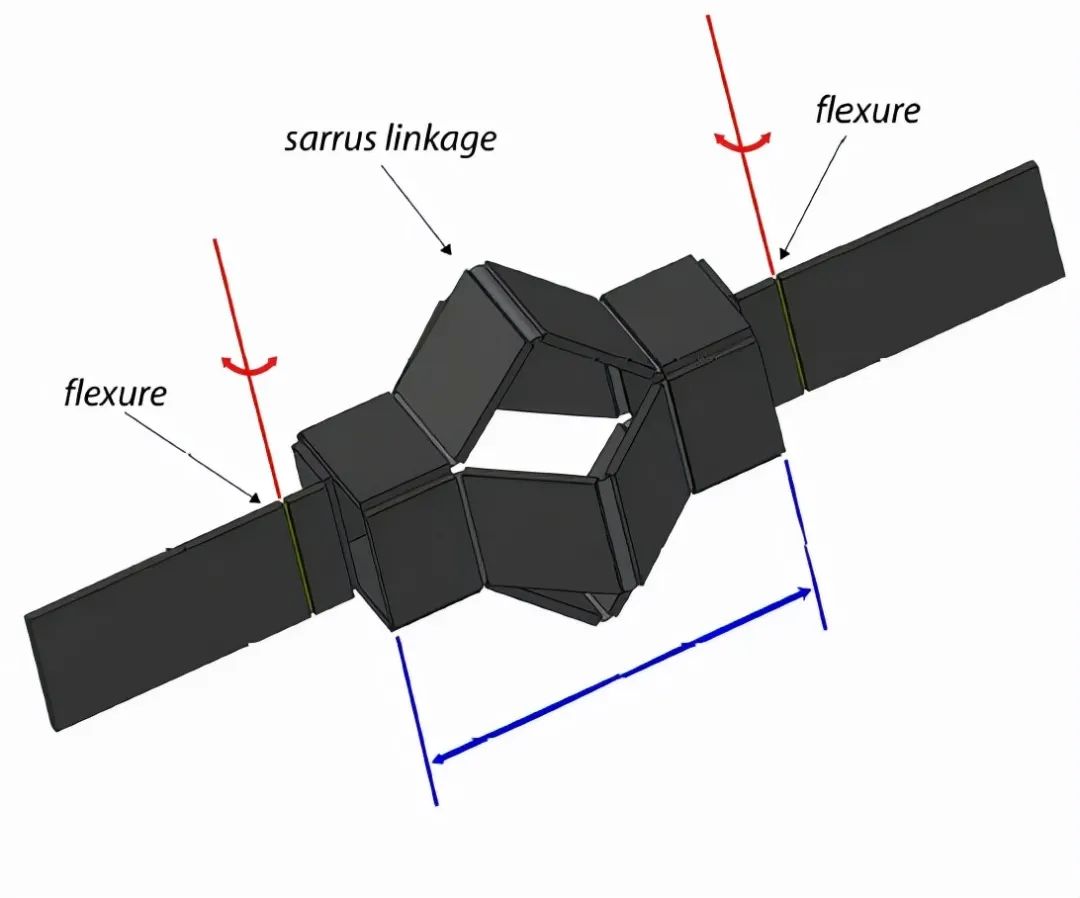 Figure | Sarrus mechanism used to construct multi-segment robots (Source: Robert J. Wood)
Figure | Sarrus mechanism used to construct multi-segment robots (Source: Robert J. Wood)
In terms of wiring, each segment of the multi-legged robot has two piezoelectric dual-plate actuators, which achieve the standing and leg rotation movements of the robot, thus requiring two drive signals. Among them, the two piezoelectric dual-plate actuators share one ground and drive signal.
The polarities on both sides of each piezoelectric dual-plate actuator are opposite. In other words, by using only one drive signal for each piezoelectric dual-plate actuator, when one leg of the robot is raised, the other leg is pre-tensioned against the ground.
Similarly, the piezoelectric dual-plate actuators controlling the horizontal direction can achieve forward and backward movement. Thus, by controlling the voltage signal, spatial movement control of the robot can be achieved.
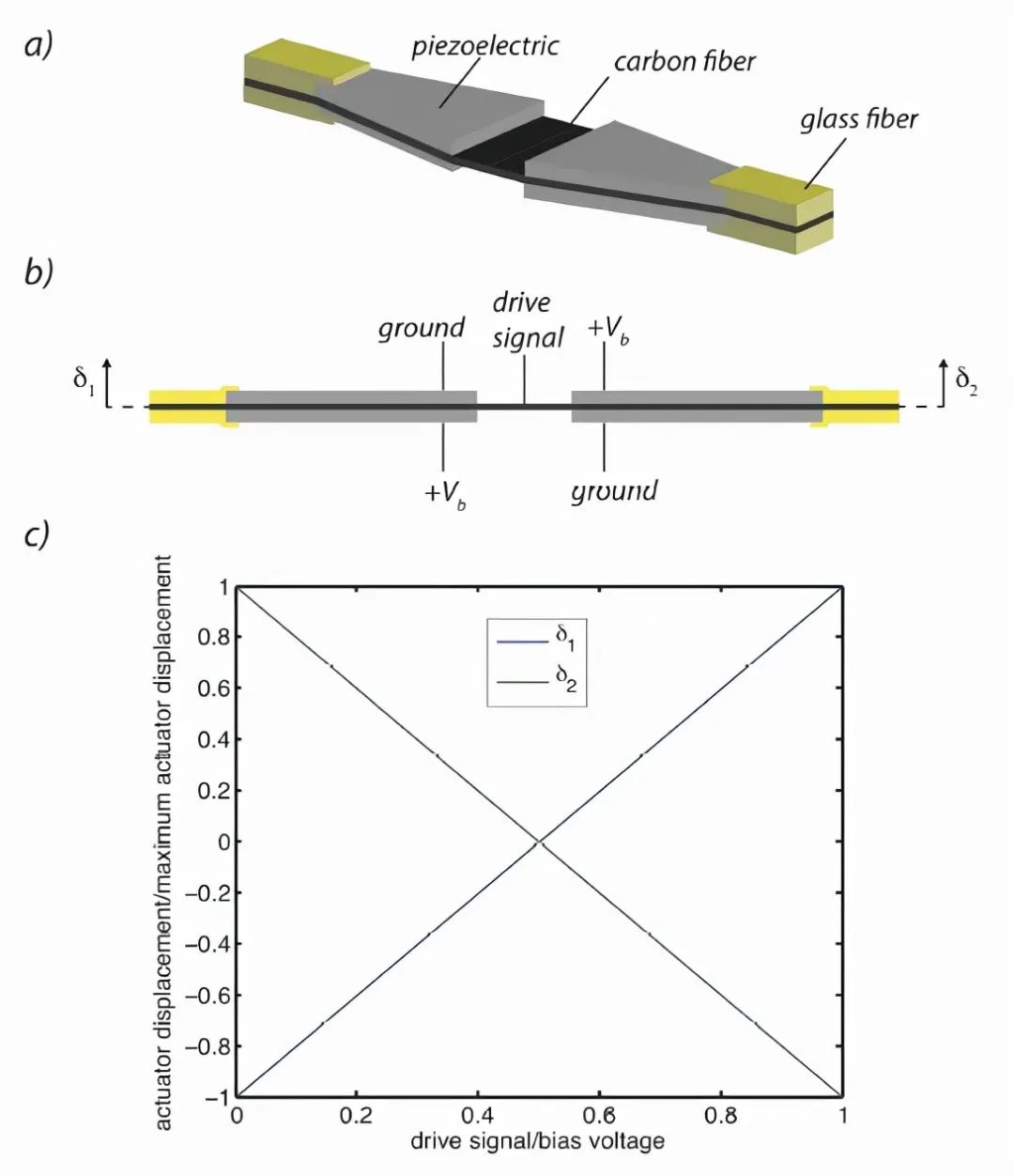 Figure | The piezoelectric dual-plate actuators used and their bending displacement output (Source: Robert J. Wood)
Figure | The piezoelectric dual-plate actuators used and their bending displacement output (Source: Robert J. Wood)
To maintain static stability during movement, the authors assembled a micro-robot with three segment actuators in this design. They also significantly reduced the number of silicone wires using copper traces. Due to the small size of the robot, the brittleness of the actuators cannot handle square wave signals, as instantaneous changes in signals can damage the piezoelectric actuators.
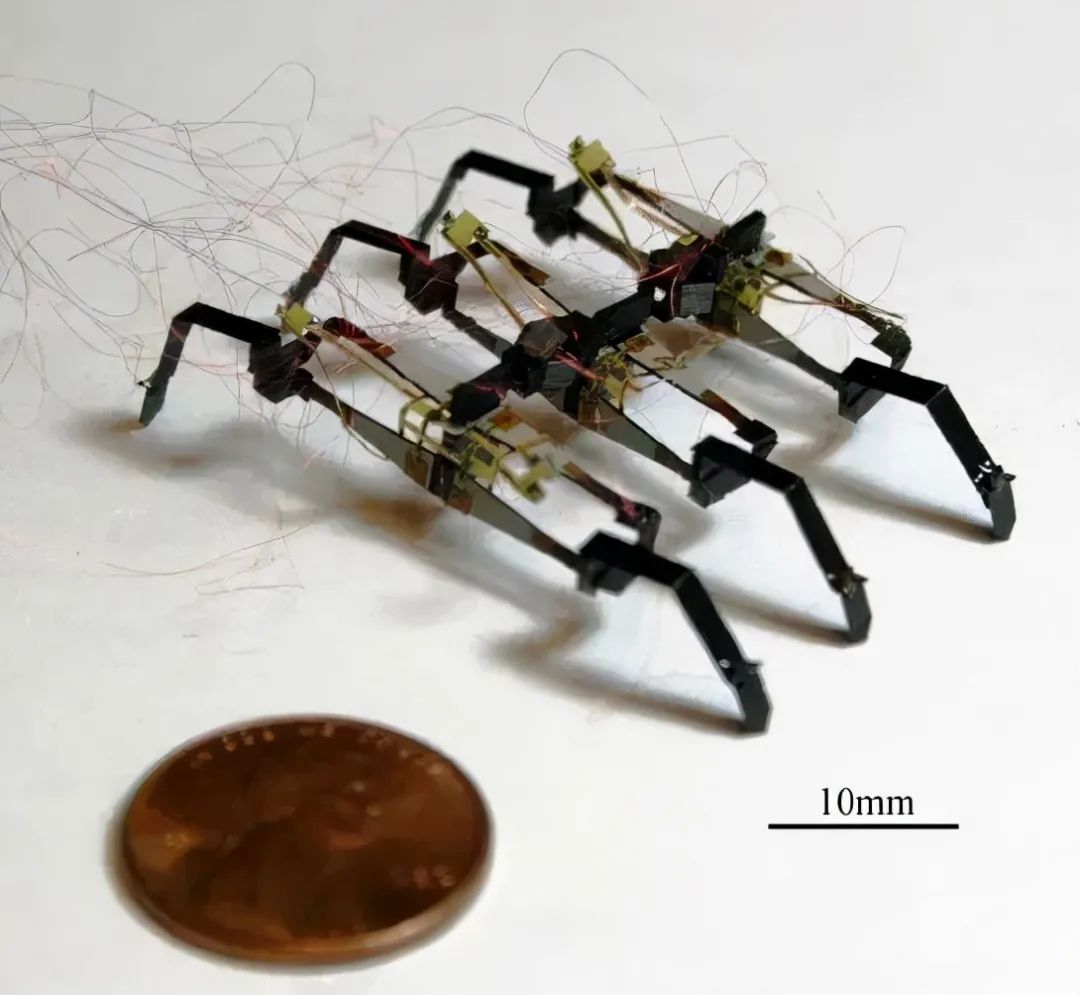 Figure | Structure of the three-segment centipede micro-robot (Source: Robert J. Wood)
Figure | Structure of the three-segment centipede micro-robot (Source: Robert J. Wood)
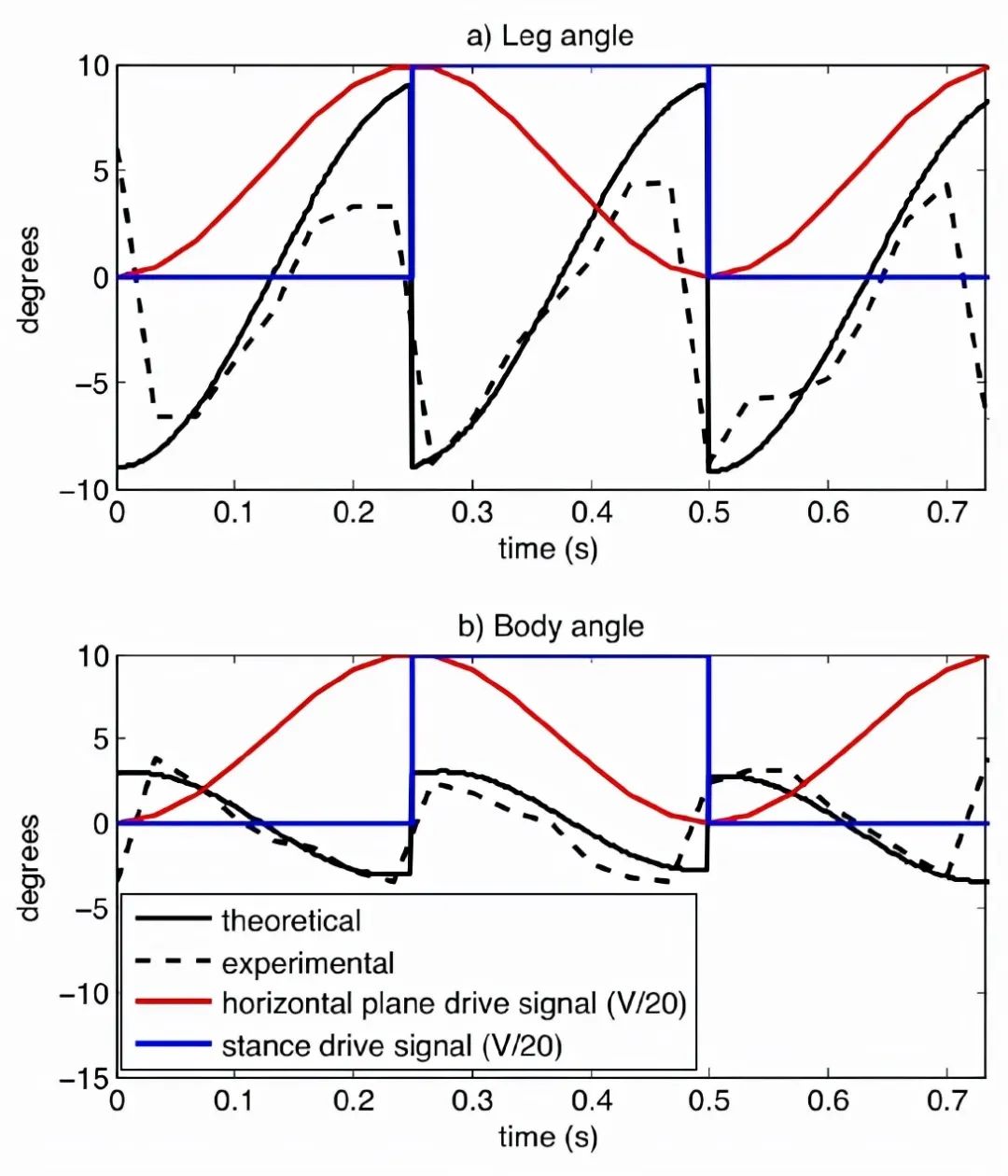 Figure | Assembled three-segment centipede micro-robot (Source: Robert J. Wood)
Figure | Assembled three-segment centipede micro-robot (Source: Robert J. Wood)
To achieve excitation, the authors applied a sine drive signal with an amplitude of 200 V and a frequency of 2 Hz, switching the standing and swinging legs in the horizontal plane at the peak of the sine drive signal.
Among them, the experimental leg and segment angle of the middle segment were extracted and compared with the dynamic model, showing that the experimental values and theoretical values are very close, proving the effectiveness of the dynamic model.
At the same time, because the switching of the driving legs is not instantaneous, there is a coupling phenomenon in the movement (i.e., when moving forward/backward, there may be a left or right deviation). In the experimental results, when the excitation frequency is 2 Hz, the robot advanced approximately a distance equal to its body length within 10 seconds, with a stride length ranging from 0.75 mm to 1 mm.
Figure | Comparison of theoretical model and experimental output of the middle segment in the three-segment robot (Source: Robert J. Wood)
The piezoelectric micro multi-legged robot proposed in this study provides inspiration for researchers related to manufacturing, control, climbing, and modeling, greatly enhancing the movement capabilities of multi-legged robots and expanding their application scenarios, such as in search and rescue tasks, exploration in hazardous environments, and surveillance, with high research and market prospects.
Highlights
Director Zi Bin – Trends in Mechanical Engineering Technology Development and Talent Cultivation
Fudan University’s Zhang Wenqiang – Talent Cultivation for Artificial Intelligence in New Engineering
Professor Zhao Xin’s report at the China International Robotics Summit Forum – Talent Cultivation for Artificial Intelligence in the Network Era



Disclaimer
Source: DeepTech
Any information sourced from other media is reprinted from other media and does not represent our website’s endorsement of its views, nor does it represent our website’s responsibility for its authenticity. For reprints of original content from our company, please contact us!