Recently, a team led by Associate Researcher Xu Sheng and Researcher Xu Tiantian from the Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences, proposed a complex motion learning control method for miniature fish-like magnetic driven robots. This method establishes the relationship between controllable magnetic field variations and various action primitives of the fish-like robot through broad learning network training, enabling complex movements of the fish-like robot without the need for complicated parameter tuning, while ensuring excellent robustness and stability against external disturbances. The related research results were published in A Robot Motion Learning Method Using Broad Learning System Verified by Small-scale Fish-like Robot in the IEEE Transactions on Cybernetics.
Due to their reasonable configuration and small scale, miniature fish-like robots can maneuver flexibly in complex and confined spaces, showing great application potential in fields such as micropore exploration and targeted therapy. However, controlling the robot’s movement along a desired trajectory is quite challenging due to the strong nonlinearity between the magnetic field and the robot’s motion. Additionally, in complex scenarios (such as inside the human body), the accurate coordinates of the ideal target trajectory are often difficult to obtain, limiting the application of tracking control strategies. The internal environment is convoluted and complex, with frequent directional changes, leading to cumbersome and repetitive adjustments of the controller. Therefore, it is necessary to encapsulate the underlying movements of the miniature robot into basic movements, such as straight movement, right-angle turns, S-shaped bends, and C-shaped bends, and use these basic movements as primitives in a high-level motion command library for easier invocation in subsequent macro motion path planning, thereby reducing the computational complexity of real-time control commands. The research team combined broad learning theory to train and learn the motion primitives of the magnetic-controlled fish-like robot, completing various complex movements.
The research team designed a basic motion controller for the miniature robot based on a broad neural network; using Lyapunov stability theory, they derived constraints on the controller network parameters to ensure the stability of the robot’s movement, simplifying the training and learning process of controller parameters for different motion primitives. They proposed a training method for the controller network parameters based on variations in magnetic field parameters and changes in the robot’s velocity vector, allowing users to obtain various motion primitives simply by changing the types of training data, while considering stability constraints in the training algorithm to ensure the stability of the obtained controller.
Through simulations and experiments, the research team utilized the proposed learning control method to obtain controllers for various motion primitives such as acute turns, J-shaped bends, and S-shaped bends, and conducted obstacle avoidance experiments with the fish-like robot. During the robot’s movement, researchers simulated complex disturbances that may exist in real scenarios by manually shaking the container and violently touching the robot. In complex environments, the robot efficiently avoided obstacles by directly invoking motion primitives such as C-shaped bends and S-shaped bends. Using the proposed method, the robot was able to reach the final designated area, validating the strong disturbance resistance of the proposed method. This achievement aligns with the concept of high-level motion command planning, significantly simplifying the computational complexity of real-time control commands, laying the foundation for multi-robot cluster movements or optimal motion planning without reference trajectories for miniature robots, and can also be extended to complex motion control of drones, unmanned vehicles, and industrial robots.
The related research work was supported by the National Key Research and Development Program, the National Natural Science Foundation, the Guangdong Natural Science Foundation, the Youth Innovation Promotion Association of the Chinese Academy of Sciences, and various technology projects in Shenzhen.
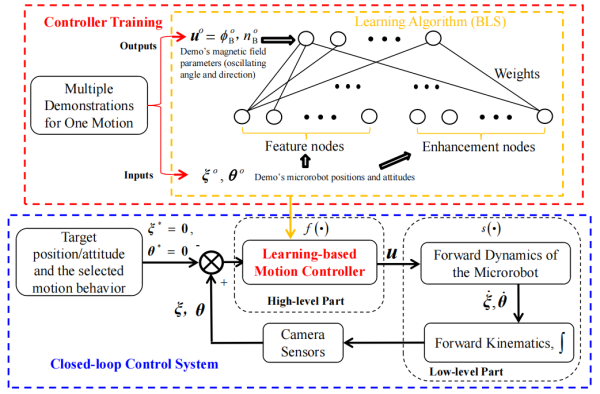
Figure 1: Motion primitive learning control method for miniature fish-like robots based on broad neural networks
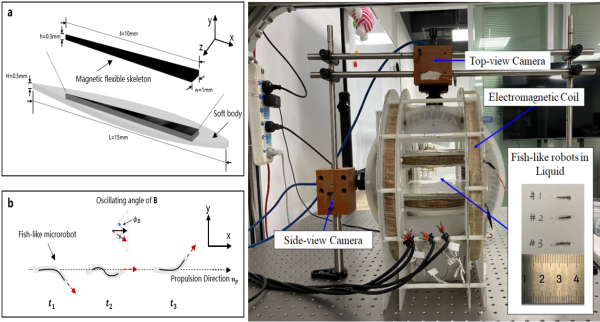
Figure 2: Structure and motion principle of the miniature fish-like robot, magnetic drive experimental system
Figure 3: Actual effect of the robot executing the “S” shape obstacle avoidance multiple times
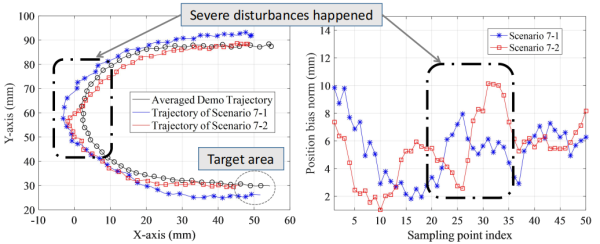
Figure 4: Verification of the robot’s strong disturbance resistance (violent obstruction, container vibration)
Source: Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences

This account’s articles are defaulted to enable WeChat “Quick Reprint”
Please indicate the source when reprinting
For other channels, please contact us