As automotive consumers increasingly demand safety, comfort, and intelligence in vehicles, automotive bus technology has rapidly developed. The use of in-vehicle bus systems simplifies the number of harnesses, enables intelligent information exchange, and connects all control units through a network bus system for data transmission. Each ECU unit can exchange data at any time to achieve information sharing, such as engine speed, throttle position, and vehicle speed.
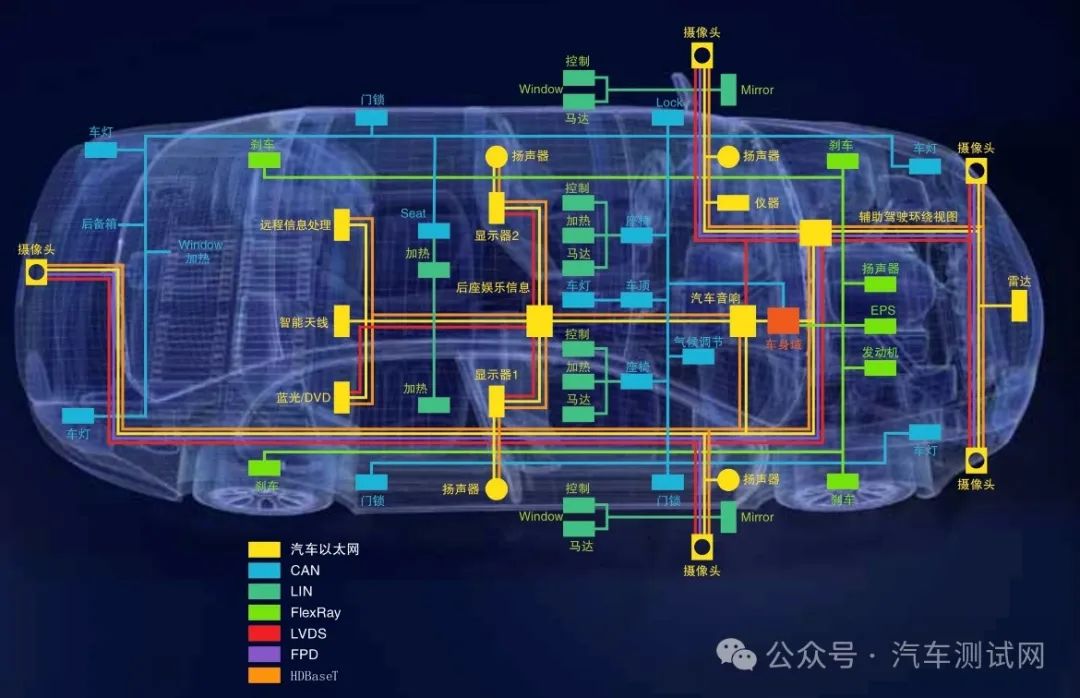
 Distribution of Automotive Bus ECUs
Distribution of Automotive Bus ECUs
Currently, the commonly used automotive buses include Local Interconnect Network (LIN) and Controller Area Network (CAN). Emerging automotive bus technologies include FlexRay, a high-speed fault-tolerant network protocol, MOST bus for automotive multimedia and navigation, and Bluetooth, Wireless LAN, and other wireless network technologies.
This article primarily introduces four mainstream automotive buses: CAN, LIN, FlexRay, MOST, and in-vehicle Ethernet.
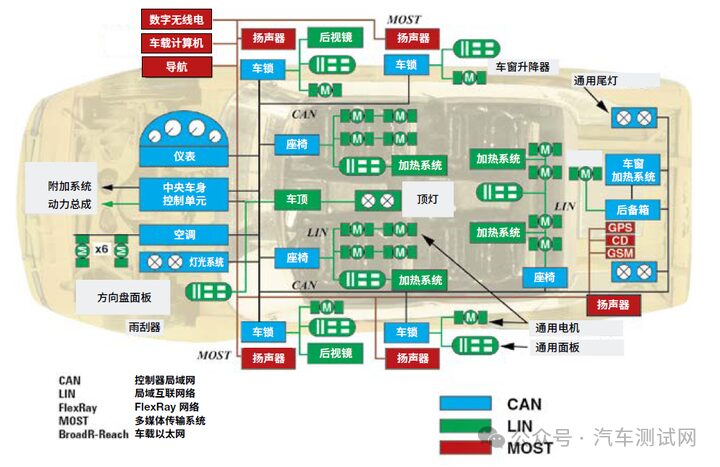
 Types of In-Vehicle Buses
Types of In-Vehicle Buses
1. CAN Bus
Controller Area Network (CAN) is a serial communication protocol bus for real-time applications, capable of transmitting signals over twisted-pair wires, and is one of the most widely used field buses in the world.
The CAN protocol is used for communication between various components in vehicles, replacing expensive and bulky wiring harnesses. The characteristics of the CAN protocol include complete serial data communication, real-time support, transmission rates up to 1 Mb/s, and 11-bit addressing and error detection capabilities.
The CAN bus was first proposed by Bosch in Germany in the 1980s, initially motivated to solve the communication between the numerous electronic control devices in modern vehicles, thereby reducing the increasing number of signal lines.
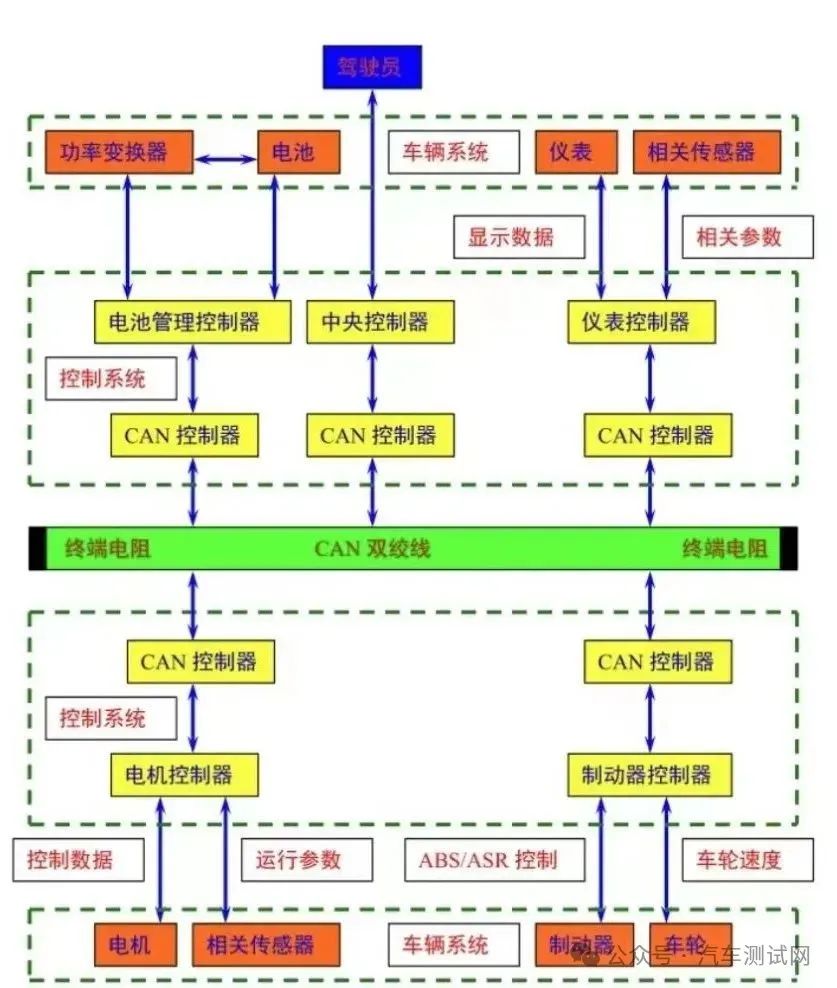 Principle of the CAN Bus System
Principle of the CAN Bus System
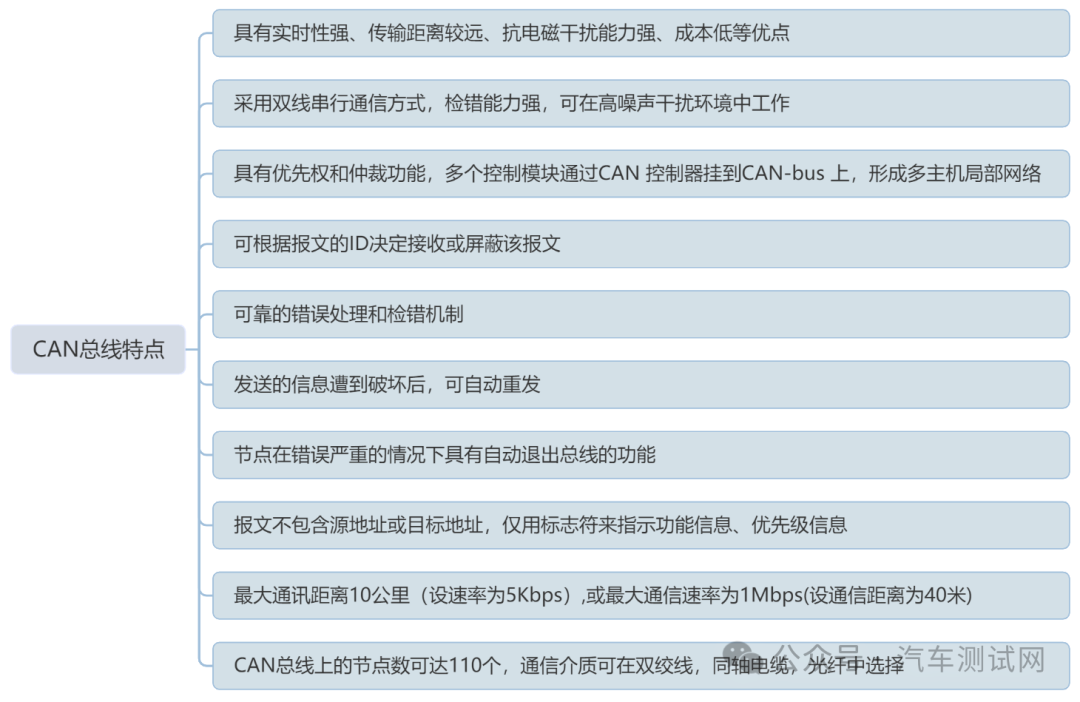 Characteristics of the CAN Bus
Characteristics of the CAN Bus
2. LIN Bus
LIN (Local Interconnect Network) is a low-cost serial communication network defined for automotive distributed electronic systems, serving as a supplement to other automotive multiplex networks such as CAN, aimed at controlling distributed electronic systems in vehicles. The goal of LIN is to provide auxiliary functions for existing automotive networks (e.g., CAN bus).
The LIN Alliance was established in 1999 and released version LIN 1.0. Initial members included Audi, BMW, Chrysler, Motorola, Bosch, Volkswagen, and Volvo. LIN is mainly used in in-vehicle distributed electronic control systems, particularly for digital communication scenarios aimed at smart sensors or actuators, with applications in electric windows, seat adjustments, and lighting control.
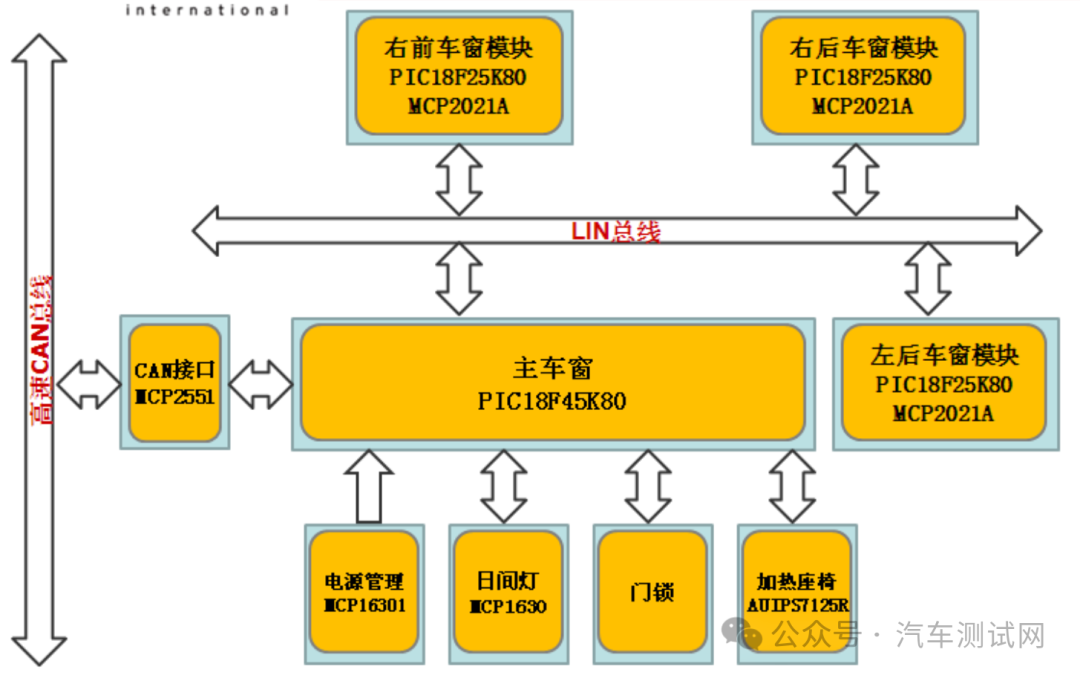 Applications of LIN Bus in Automobiles
Applications of LIN Bus in Automobiles
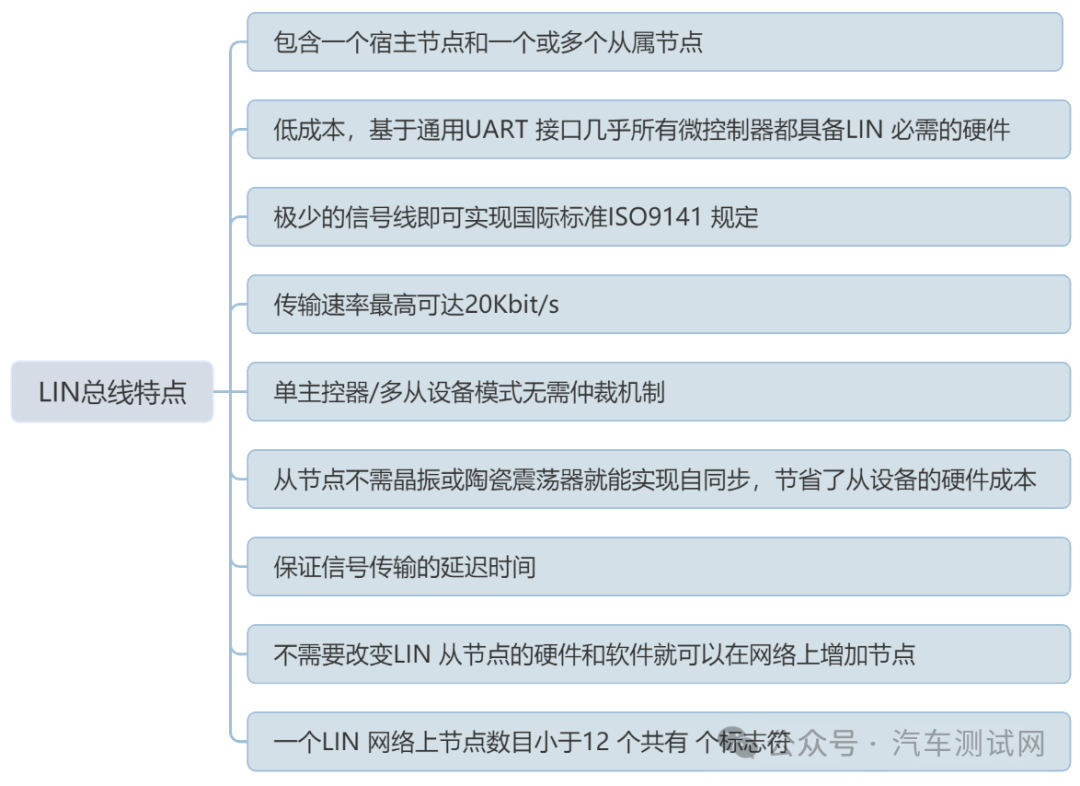 Characteristics of LIN Bus
Characteristics of LIN Bus
3. FlexRay Bus
FlexRay is a high-speed, deterministic bus technology for automotive applications with fault tolerance capabilities. It combines event-triggered and time-triggered methods, featuring high network utilization and system flexibility, making it a backbone network for the next generation of in-vehicle networks.
The FlexRay bus is a new communication standard jointly developed by companies such as BMW, Philips, Freescale, and Bosch, specifically designed for in-vehicle networking. It employs a time-triggered mechanism and has high bandwidth and good fault tolerance characteristics, offering advantages in real-time performance, reliability, and flexibility.
FlexRay can be applied in passive bus and star network topologies, as well as combinations of both. These topologies support dual-channel ECUs, which integrate multiple system-level functions to save production costs and reduce complexity. The dual-channel architecture provides redundancy and doubles the available bandwidth, with a maximum data transmission rate of 10 Mbps per channel.
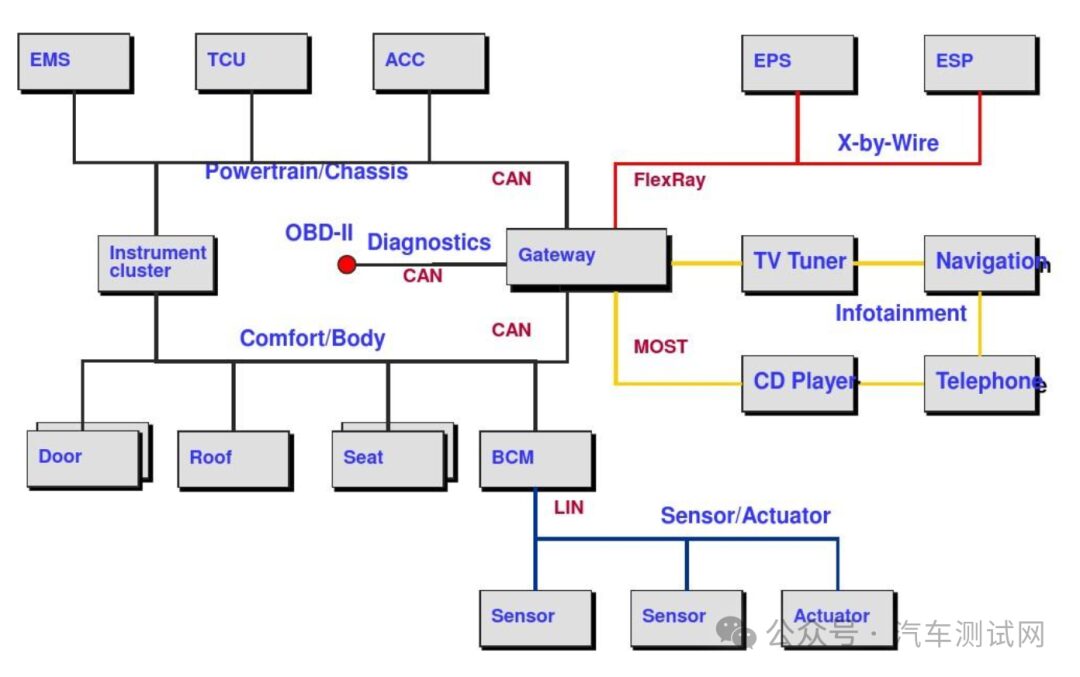 Applications of FlexRay in Automotive Buses
Applications of FlexRay in Automotive Buses
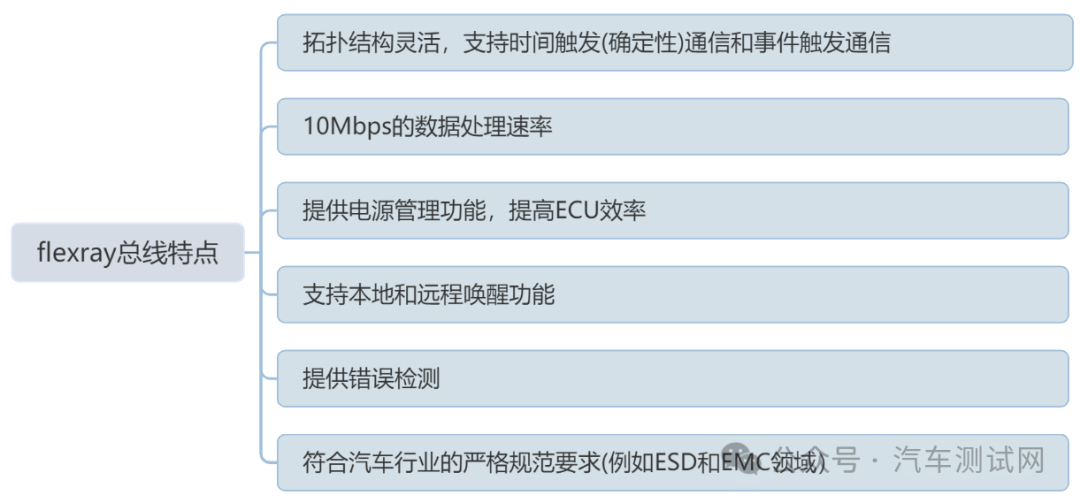 Characteristics of FlexRay Bus
Characteristics of FlexRay Bus
4. MOST Bus
MOST (Media Oriented System Transport) is a media-oriented system transport bus, representing a “multimedia transport system.” It is a data bus technology for automotive multimedia information transmission based on communication protocols, using optical fibers or twisted pairs as physical transmission media, specifically developed for in-vehicle use to serve multimedia applications.
BMW, Mercedes-Benz, Buick, and SMSC founded the MOST Cooperation in 1998 as a German civil partnership, and Audi soon joined the organization. After the establishment of the MOST Cooperation, efforts were made to rapidly standardize the protocol, quickly implementing actual systems in vehicles.
The MOST transmission protocol consists of data blocks divided into frames, each frame containing stream data, packet data, and control data. The MOST bus uses optical pulses for data transmission, adopting a ring structure where data can only be transmitted in one direction within the ring bus.
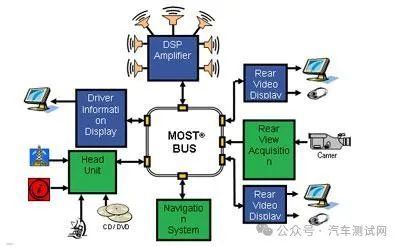 In-Vehicle Entertainment System Based on MOST Bus
In-Vehicle Entertainment System Based on MOST Bus
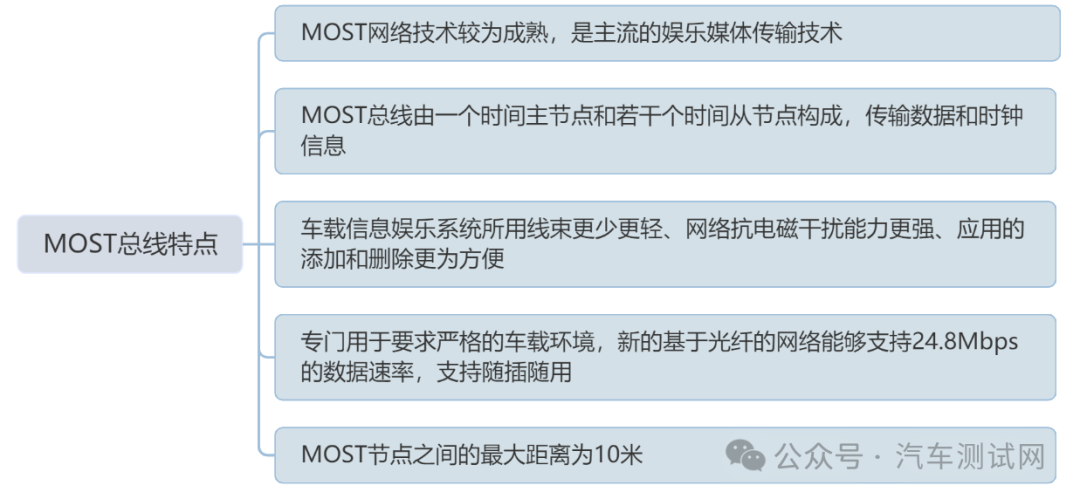 Characteristics of MOST Bus
Characteristics of MOST Bus
5. In-Vehicle Ethernet
In-Vehicle Ethernet connects internal electronic units of vehicles through Ethernet technology, achieving data transmission rates of 100 Mbps, and even reaching 1 Gbps, using a single pair of unshielded twisted pairs, while meeting the automotive industry’s requirements for low power consumption, low electromagnetic radiation, and strong reliability.
Ethernet was originally created by Xerox and became a network standard in 1980 through collaboration between DEC, Intel, and Xerox.
Standards for In-Vehicle Ethernet: Ethernet is the most widely used local area network, including standard Ethernet (10 Mbit/s), Fast Ethernet (100 Mbit/s), and 10G Ethernet (10 Gbit/s). Currently, the data transmission rate used in vehicles is the IEEE 802.3u standard at 100 Mbit/s.
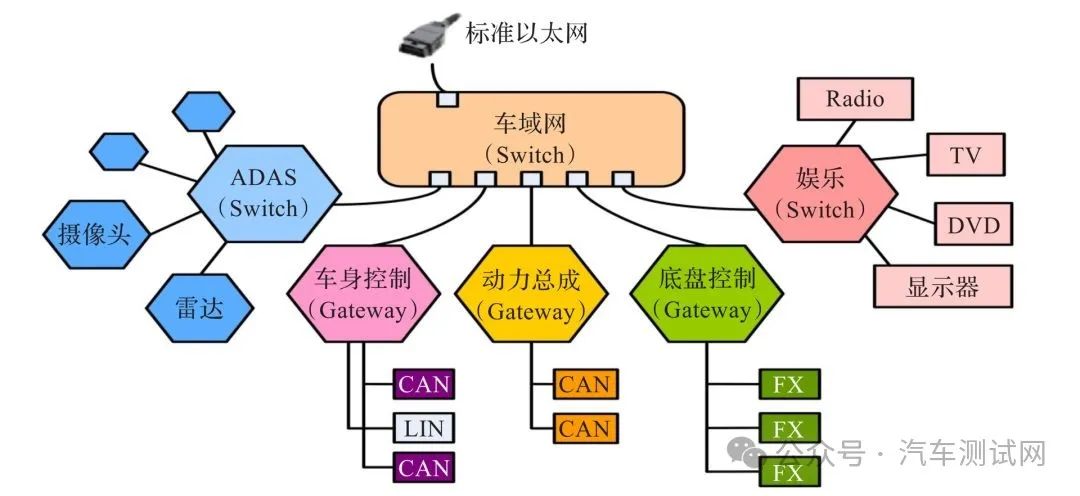
 Vehicle Architecture of In-Vehicle Ethernet
Vehicle Architecture of In-Vehicle Ethernet
Characteristics of In-Vehicle Ethernet:
-
High Flexibility: Compared to traditional in-vehicle networks, the architecture of Ethernet is highly flexible with a star connection, providing dedicated bandwidth of 100 Mbps for each link;
-
Strong Scalability: Ethernet has excellent scalability, allowing for remote processing of information and treating the in-vehicle system as a network system to meet the requirements of “reusability” and “interoperability”;
-
Cost-Effectiveness: Ethernet has significant advantages in openness and maturity, which also helps to save overall application costs in the automotive field.
The degree of automotive electronics is an important indicator of modern automotive standards, and the advancement of automotive electronic technology has also driven the development of bus technology. With increasingly complex automotive electronic devices, sensors, controllers, interfaces, etc., higher bandwidth requirements are necessary, and the communication rates inside and outside the vehicle have significantly increased. The advantages of Ethernet make its application in the automotive industry an inevitable trend in the future.