
The robotic arms we often refer to are typically articulated multi-degree-of-freedom robots resembling human arms. They consist of multiple driven joints connected in series through the mechanical structure of the robot body, allowing the end of the robot to achieve multi-degree-of-freedom motion in space. By installing actuators such as suction cups, grippers, or paint nozzles at the end, they can replace human labor in performing some high-risk, high-intensity repetitive tasks. They are now widely used in industries such as manufacturing, healthcare, education, and entertainment, closely related to our daily lives. This article will summarize the essential topics that must be mentioned when discussing “robotic arms”.
1. The “Axes” of Robotic Arms
The term “axes” corresponds to the degrees of freedom (DOF) in mechanical terminology, representing the number of independent motion coordinate axes that the robot possesses, which is usually equal to the number of motors used in the robot. For example, a seven-axis robotic arm uses 7 motors to drive the robot’s operation through 7 independent movements. Common robotic arms typically have between 3 to 7 axes; the more axes, the more flexible the robot, but the structure becomes more complex and the cost increases.
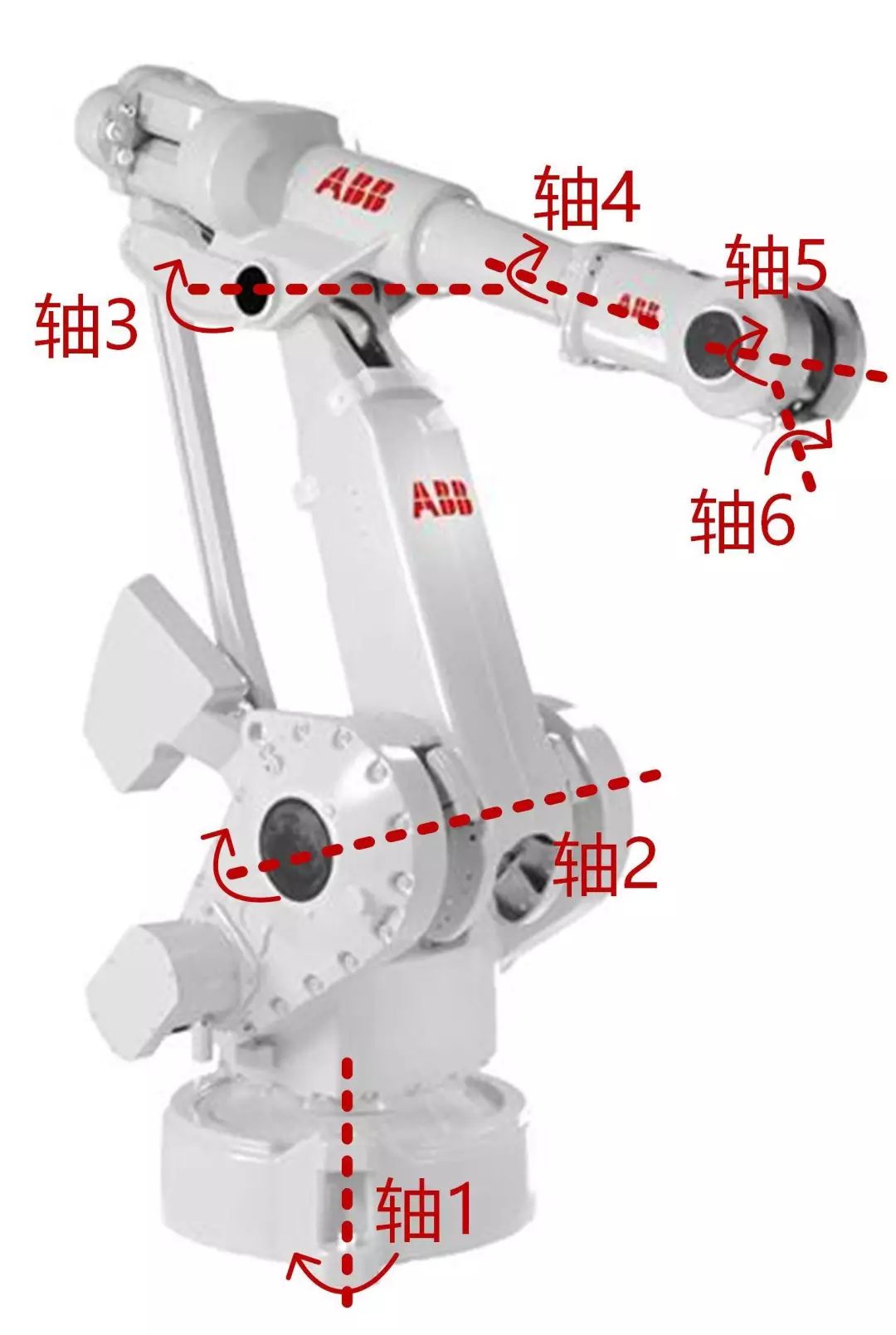
ABB’s six-axis robotic arm (Image source: ABB)
(1) Four-Axis Robotic Arm – SCARA Robot
The SCARA robot (Selective Compliance Assembly Robot Arm), also known as a horizontal multi-joint robot, was invented in 1978 by Hiroshi Makino from Yamanashi University in Japan. This robot has 4 independent driven joints, including 3 parallel rotating joints and 1 moving joint. The 3 rotating joints allow the robot to position and orient itself in a plane, while the moving joint enables linear motion perpendicular to the plane. The SCARA robot has a relatively simple structure, allowing for rapid movement, making it suitable for fast sorting; it has compliance in the XOY plane and good rigidity in the Z-axis direction, making it also suitable for precision assembly.

EPSON’s SCARA robot
(Image source: EPSON)
(2) Six-Axis Robotic Arm – The Most Common Industrial Robot
In 1959, George Devol and Joseph F. Engelberger invented the world’s first industrial robot, which functioned similarly to a human arm and was named Unimate, meaning “universal automation.” The most common six-axis robotic arm is a typical industrial robot, widely used in automatic handling, assembly, welding, and painting in industrial settings.
Structurally, this robot has 6 independent driven joints. The first driven joint simulates the human waist rotation, the second and third driven joints simulate the upper and lower arm movements, and the last three driven joints replicate the functions of the human wrist, allowing for flexible movement and enabling any positioning and orientation within its working range. The six-axis robotic arm has good versatility, and when equipped with end effectors such as suction cups, grippers, or claws, it can meet the needs of different industrial processes and has become a backbone of flexible manufacturing and assembly production lines.
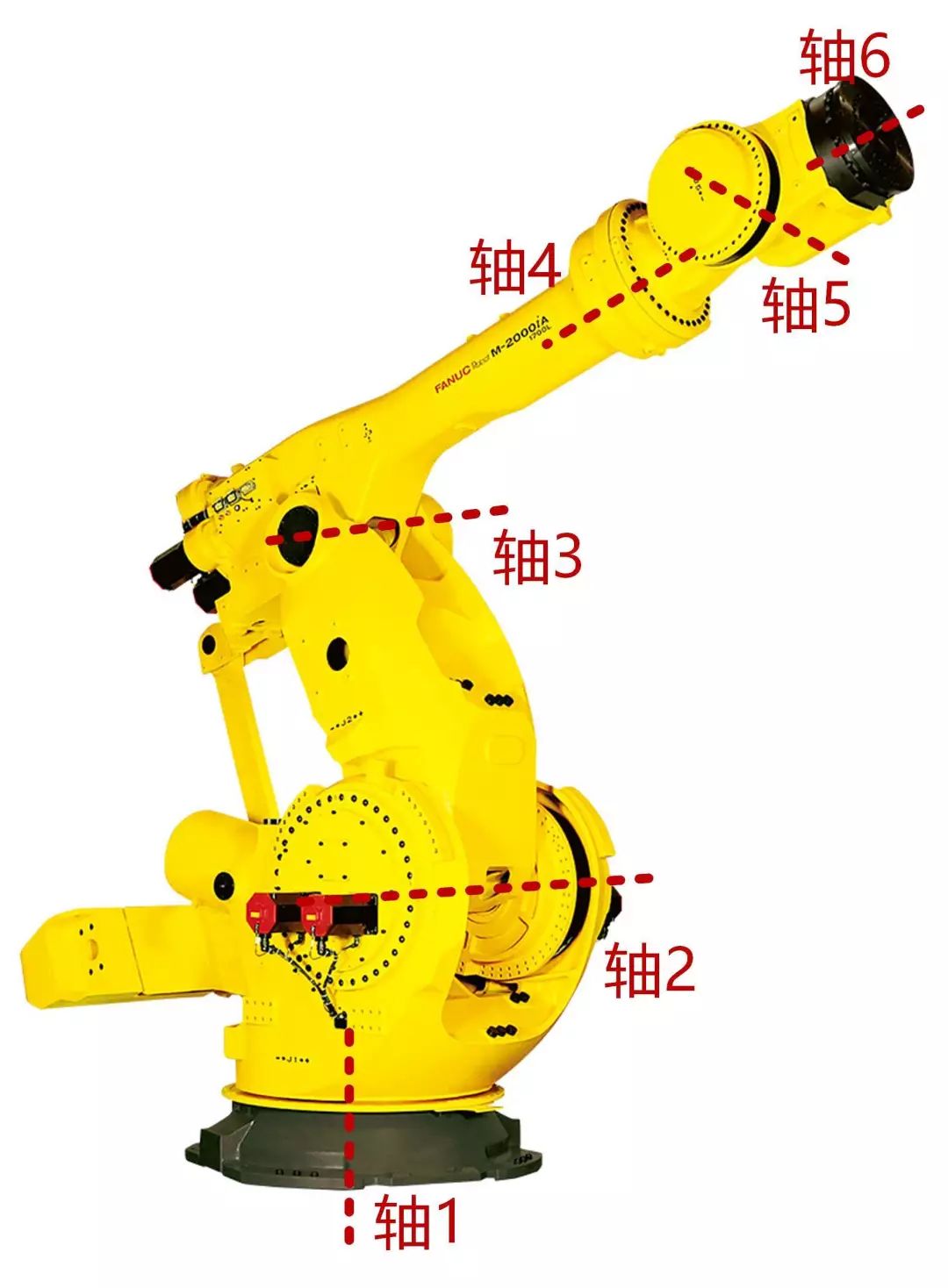
FANUC’s large six-axis industrial robot
(Image source: FANUC)
(3) Seven-Axis Robotic Arm – The Obstacle-Avoiding Robot
The seven-axis robotic arm has 7 independent driven joints, allowing for the most realistic replication of human arm movements. While six-axis robotic arms can already position themselves in any location and direction in space, the seven-degree-of-freedom robotic arm adds a redundant driven joint, providing greater flexibility to adjust the arm’s configuration while keeping the end effector fixed, effectively avoiding nearby obstacles. The redundant drive axis enhances the arm’s flexibility, making it more suitable for human-robot collaborative use.
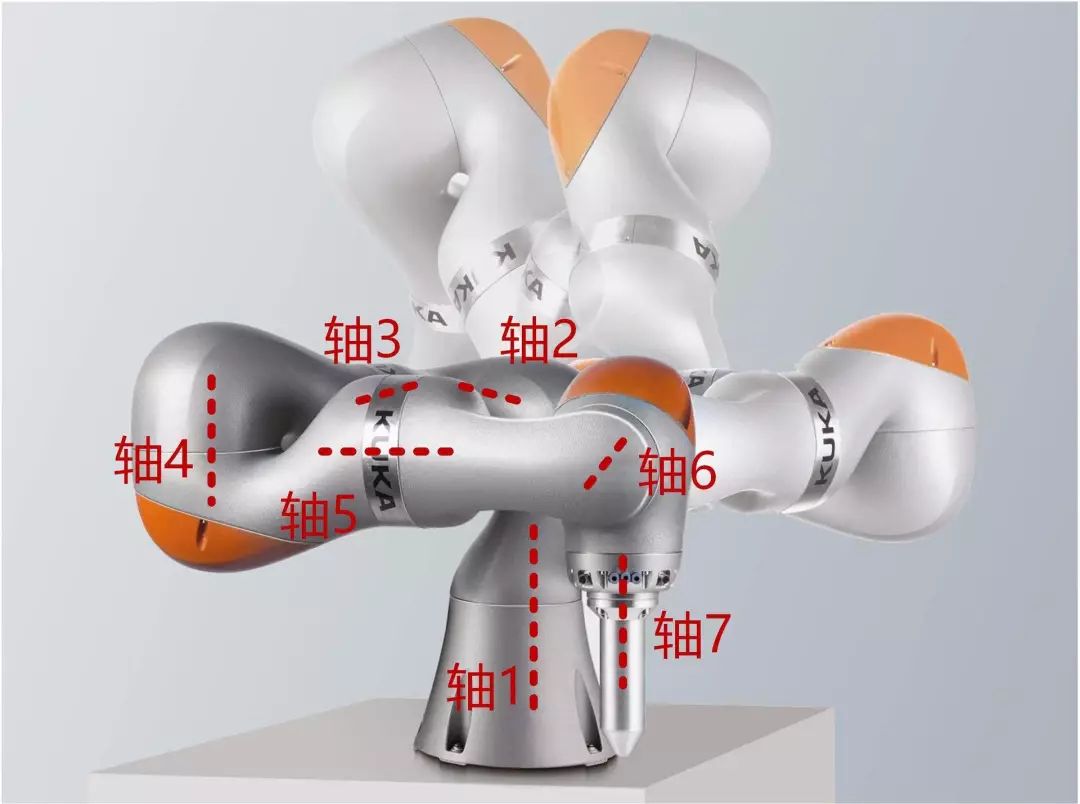
KUKA’s LBR iiwa seven-axis robot
(Image source: KUKA)
2. The Core Components of Robotic Arms
(1) Servo Drive
Servo refers to the approximation of the command signal and control result to a certain degree, allowing the controlled object to move according to the command. Common servo drives used in robotic arms include servo motors and servo hydraulic cylinders. The former provides feedback on the position of the motor output through rotary or linear encoders, while the latter uses magnetostrictive displacement sensors to feedback the displacement of the hydraulic cylinder’s extending rod, both achieving very accurate closed-loop control of displacement and speed.
Servo motor-driven motion is highly precise and easy to adjust, but the thrust is relatively small, and increasing thrust can be costly. In contrast, servo hydraulic cylinders have fast response times and high thrust, but the system maintenance is complex. The KUKA industrial robot shown in the image uses a servo motor drive, balancing the load with hydraulic cylinders at joints with larger loads, optimizing the robot’s size, load, and control precision indicators, with a repeatability of ±0.08 mm and a maximum load of 1.3 tons.

KUKA’s KR 600 industrial robot
(Image source: KUKA)
(2) Reducer
A reducer is typically connected to the output shaft of the servo motor to reduce the speed at the motor output. With the power of the servo motor remaining constant, reducing the motor speed can increase the output torque and enhance the motor’s driving capability. Commonly used reducers in industrial robots include harmonic reducers and RV reducers.
1. Harmonic Reducer
Harmonic reducers mainly consist of three parts: a rigid wheel, a flexible wheel, and a wave generator. The rigid wheel has internal teeth, while the flexible wheel has external teeth and can deform elastically radially. The wave generator is installed inside the flexible wheel and is elliptical, with rolling bearings on the outer circle. The number of external teeth on the flexible wheel is less than that of the internal teeth on the rigid wheel. When the motor shaft drives the wave generator to rotate continuously, it forces the flexible wheel to deform continuously, resulting in a tooth misalignment motion that drives the flexible wheel to rotate, achieving a reduced output.
The harmonic gear reducer has advantages such as high precision and high load capacity. Compared to ordinary reducers, it uses 50% less material, and its volume and weight are reduced by at least one-third. The transmission ratio of harmonic reducers generally ranges from 70 to 320, with a simple structure and easy installation. However, the flexible wheel of the harmonic reducer is prone to fatigue and has poor heat dissipation conditions, making it commonly used in the wrist drive joints of industrial robots with smaller loads.
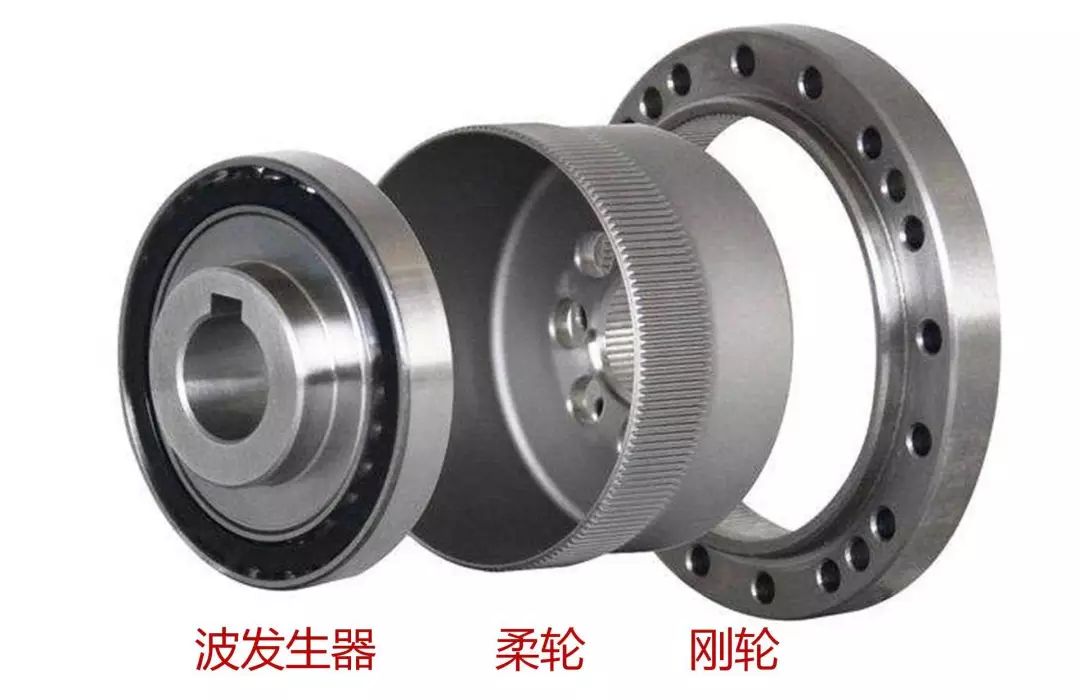
Harmonic reducer
2. RV Reducer
RV reducers consist of a first-stage involute cylindrical gear planetary reduction mechanism and a second-stage cycloidal pinwheel planetary reduction mechanism. The motor shaft drives the sun gear of the planetary reduction mechanism, which in turn drives the three planet gears to revolve and rotate, allowing the planet gears to drive the crankshaft to rotate, achieving differential gear speed reduction.
RV reducers have good fatigue strength, rigidity, and lifespan, making them suitable for medium to heavy loads. Additionally, RV reducers maintain stable precision, avoiding the precision degradation that harmonic reducers experience after long-term use, and are commonly used in the waist rotation, upper arm, and lower arm drive joints of industrial robots. However, RV reducers have a more complex design and greater manufacturing difficulty.
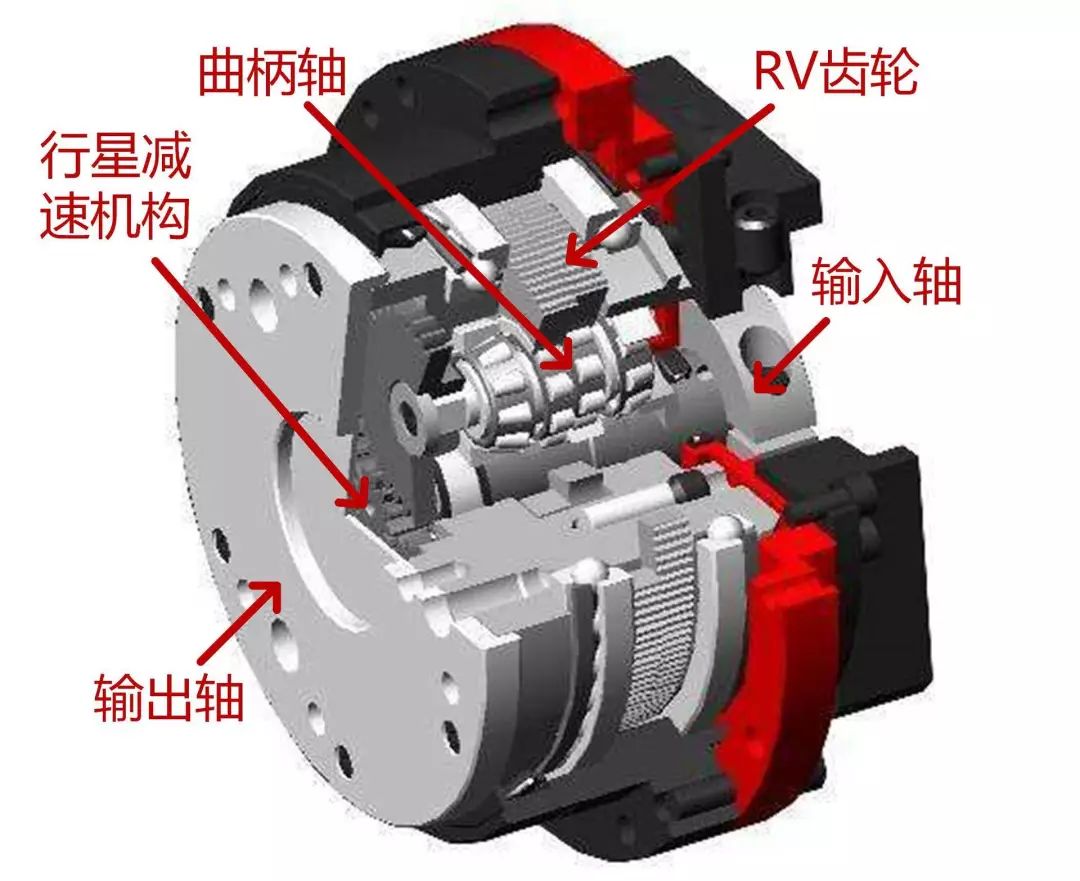
RV reducer
(3) Controller
The controller can manage the motion position and posture, motion trajectory, and operation sequence of the industrial robot within its workspace. It needs to have characteristics such as quick programming, user-friendly interface, and ease of use, and is generally designed and developed independently by robot companies, possessing its own development environment and programming language. Currently, most robot motion controllers use chips such as ARM, DSP, POWERPC, and Intel to provide sufficient computing and storage capabilities. Communication often employs serial bus technology based on RS-485 and industrial Ethernet. Additionally, some companies develop their own chips to meet specific requirements in performance, price, and interfaces. Currently, modular and standardized robot controllers with an open structure are a development direction, providing software and hardware controller solutions based on functional divisions.

YASKAWA’s modular controller
(Image source: Yaskawa China)
3. Related Technologies
As the cost of industrial robots decreases and their applications expand, more technologies are being applied to robotic arm systems to meet different functional needs.
(1) Machine Vision
The machine vision system replaces human eyes for measurement and judgment. By installing CCD or CMOS image capture devices on industrial robots, the target being captured is converted into image signals, which are then processed by an image processing system for feature judgment, subsequently controlling the robot’s actions. This technology is widely used in production, assembly, packaging, and product inspection fields. It can also be used for position servo control based on the vision system, enabling robot navigation.
(2) Artificial Intelligence
Artificial intelligence enables robots to respond in ways similar to human intelligence, with related technologies including speech recognition, image recognition, natural language processing, and expert systems. Industrial robots are one of the important carriers for implementing artificial intelligence, allowing for intelligent monitoring of production, product inspection and screening, fault prediction and maintenance, intelligent logistics, and decision support. Additionally, robotic arms utilizing artificial intelligence are increasingly being applied in human-robot collaboration, inferring human intentions through environmental perception to provide assistance.
(3) Collaborative Robots
Collaborative robots are a type of robot developed based on robotic arms that can interact and work closely with humans, featuring good safety measures that can detect contact forces and collisions in real-time. They are easy to use and can be quickly integrated into various application scenarios, assisting operators in completing tasks, representing an important development direction for robots in recent years.
4. Conclusion
Multi-degree-of-freedom articulated robots represented by robotic arms have penetrated from traditional equipment manufacturing into fields such as healthcare, logistics, food, and entertainment. With the accelerated integration of new technologies represented by the Internet, cloud computing, and artificial intelligence with robotics, robots will become a significant driving force in the new round of technological revolution and industrial transformation.

Previous Highlights
▌Community Recruitment
Medical Robot Community Recruitment
▌Investment and Financing
Last week’s health investment and financing quick read
▌Industry Policies
【Most Comprehensive】98 Articles on Medical Device Industry Policies
▌PopularIndustry Research
Rehabilitation Exoskeleton | Microfluidics | Pharmaceutical Cold Chain | Clinical Mass Spectrometry | Gene Sequencing | Rehabilitation Robots | Doctor Groups | Hearing Aids | ECG Monitors | Information Technology in Healthcare | Digital PCR | Home Medical Devices | Smart Healthcare | Laser Aesthetics | Artificial Intelligence | Liquid Biopsy | Medical Device Financing and Leasing | Hospital Management Groups | Import Medical Device Registration Process | Pet Healthcare | Ophthalmic Disease Treatment | Bone Implant Screws | Children’s Medical Devices | Shape Memory Alloys | Rehabilitation Medical Institutions
▌Frontiers in Medical Devices
Amphibious Robots | Bionic Prosthetics | Magnetothermal Therapy | RNA Interference | 3D Printing | Brain Imaging | Digital Drugs | Near-Infrared Spectroscopy | Soft Robots | Nanopore Sequencing | Liquid Metal | Antidepressant Targets | Bionic Robots | Flying Inspection | Magnetic Resonance Imaging | Breast Augmentation Surgery | Ultrasound Diagnosis | Phage Therapy
▌Impression of Siyu
♢ Siyu Salon Rehabilitation Robots | Medical Device Technology Transfer | Patent Mining and Layout | Equity Practice
♢ Siyu Interviews Taige Jietong | Zhi Zhong Technology | Mai Di Si Chuang | Beihang Biomedical | Boston University | Tian Zhi Hang Zhang Song Gen | Medical Robot Innovation Center | Professor Zheng Cheng Gong | Huitong Medical | Professor Dong-Soo Kwon from Korea Talks about Endoscopic Robots
♢ Conference Records Beihang Medical Engineering Intersection | Medical Engineering Integration Summit Forum | Precision Medicine in Orthopedics | Ultrafast Laser | Robot Conference | Nobel Prize Conference
♢ Expert Sessions Academician Sessions | Siyu Roadshow | Yuyin Medical