Skip to content

Source: Mr. Sai
Translator: Zhao Jinyu
Core Idea: How to create a truly intelligent micro-robot that can operate independently? A robotics expert provides a detailed answer to this question and describes the medical tasks these micro-machines can perform for us.
In the near future, the “surgeons” treating our ailments may be micro-machines traveling through our bodies, capable of tracking cancer tumors or clearing clots even in the tiniest arteries. If this sounds like a setup from a science fiction novel, you’re not mistaken: films like “Fantastic Voyage” and “Innerspace” have long played with this concept, imagining machines shrunk down to the size of a single cell. Yet, advances in robotics and materials science over the past few years have brought this idea closer to reality.
Bradley Nelson, a robotics expert at ETH Zurich, has dedicated his career to creating such micro-devices. He states that while engineers have manufactured robots roughly the size of microorganisms that can move around and sense their environment, they still require human control. He says the next major challenge will be to endow these machines with some form of intelligence so that they can perform tasks independently, entirely free from human operators.
 Bradley Nelson, a robotics expert at ETH Zurich (Image source: JAMES PROVOST)
However, how can we create a truly intelligent micro-robot? How can we implement them in the real world? Authors of an article in the 2022 Annual Review of Control, Robotics, and Autonomous Systems raised these questions. Co-author Nelson spoke with Knowable magazine about why the prospects in this direction are so challenging and what the future of micro-intelligent machines might look like. To ensure brevity and coherence, this article has been edited for clarity.
What is a micro-robot? How small is it?
Generally speaking, regardless of the size of the robot, it refers to devices capable of operating in uncertain environments; they can adapt to their surroundings, move around, and achieve specific goals. The traditional view holds that robotics relies on three pillars: first, perception — robots must collect information about their environment in some way. Second, mobility — they must have some drive mechanism to interact with the world. Third, computation — they must figure out what actions to take in specific situations.
In my work, I often try to incorporate these elements into micro-machines, ranging from single-cell sizes to hundreds of micrometers. I’m less interested in things smaller than that. Once below one micron, the various physical properties dominating the environment change. You have to start considering how phenomena like Brownian motion (the random motion of atoms and molecules) will affect your device; that becomes the primary interaction between your robot and the environment, so the study turns more into chemistry rather than robotics.
Bradley Nelson, a robotics expert at ETH Zurich (Image source: JAMES PROVOST)
However, how can we create a truly intelligent micro-robot? How can we implement them in the real world? Authors of an article in the 2022 Annual Review of Control, Robotics, and Autonomous Systems raised these questions. Co-author Nelson spoke with Knowable magazine about why the prospects in this direction are so challenging and what the future of micro-intelligent machines might look like. To ensure brevity and coherence, this article has been edited for clarity.
What is a micro-robot? How small is it?
Generally speaking, regardless of the size of the robot, it refers to devices capable of operating in uncertain environments; they can adapt to their surroundings, move around, and achieve specific goals. The traditional view holds that robotics relies on three pillars: first, perception — robots must collect information about their environment in some way. Second, mobility — they must have some drive mechanism to interact with the world. Third, computation — they must figure out what actions to take in specific situations.
In my work, I often try to incorporate these elements into micro-machines, ranging from single-cell sizes to hundreds of micrometers. I’m less interested in things smaller than that. Once below one micron, the various physical properties dominating the environment change. You have to start considering how phenomena like Brownian motion (the random motion of atoms and molecules) will affect your device; that becomes the primary interaction between your robot and the environment, so the study turns more into chemistry rather than robotics.
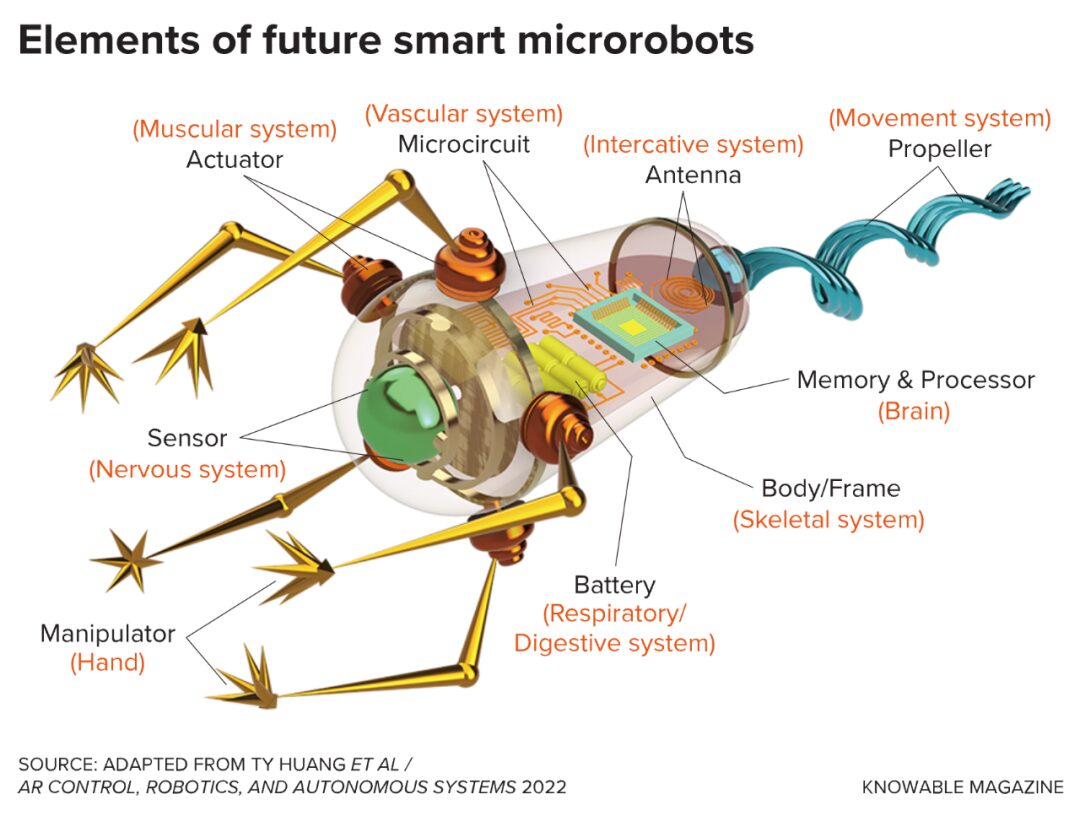
To give cell-sized robots real “intelligence”, engineers must integrate various systems. The conceptual micro-robot depicted above includes a central processor, a means of locomotion, a power source, sensors, mechanical arms, and other functions. This conceptual diagram outlines its basic structure, as well as its biological counterparts.
What does “intelligence” mean for the micro-robots you’re trying to build? What can such small devices do?
Well, that’s an interesting philosophical question that can be discussed over a beer. We can define intelligence in many ways, but when I consider something to be intelligent, my perspective is very anthropomorphized. Am I surprised by its behavior and how it adapts to its environment? Can it do something in a way that I find outstanding and interesting? If it can adapt to its environment in such a way, I consider it intelligent.
For example, consider bacteria like E. coli. Each E. coli bacterium is a single cell, perhaps only one or two micrometers long. Its surface has chemical receptors that can sense surrounding amino acids or other nutrients. It has a communication channel to its flagellum (a rotating appendage that enables locomotion), allowing it to change how it navigates through your digestive tract (or elsewhere).
E. coli also has a form of “software”: DNA fragments floating within it control how it reconstructs or repairs itself to sustain life. Thus, to some extent, it is a micro-robot of nature. It has sensors, communication channels, sensing algorithms, and control software for guiding motors — and it can make basic decisions. In fact, E. coli does this so well that some robotics experts are using it as part of their devices. They typically build micro-robots on top of microorganisms, allowing them to handle all sensing and movement.
How do you make a micro-robot dance? By shooting lasers at it, of course. Mark Miskin, a robotics expert at the University of Pennsylvania, has developed a new type of robot that can be built and controlled at the size of a cell: using focused lasers, he can power the tiny built-in circuits on the robot’s back, causing its legs to bend instantly. By alternating the laser beam between two different circuits, he can induce the robot to “walk” in a specific direction. In the video above, you can see the actual operation of this process — note the tiny white flashes appearing on the back of Miskin’s robot. (Source: MARC MISKIN / UNIVERSITY OF PENNSYLVANIA AND CORNELL UNIVERSITY)
Have your micro-robots drawn inspiration from bacteria?
Absolutely. The way they move in their environment is incredible. They employ a strategy I never thought of — initially, they move randomly, but when they begin to sense something good, like amino acids or other nutrients, they swim a bit longer, which often leads them to gradually move in that direction. This is what we call “biased random walk.” As an engineer, you’d think, “Oh, this is indeed a great approach.” They are essentially following a chemical gradient.
You can imagine creating micro-robots that can achieve similar functions: they can follow temperature gradients, pH gradients, or chemical signatures of a disease. So yes, nature has greatly inspired me. The extremely rich and complex “intelligent” behaviors that have evolved in tiny organisms are incredibly exciting if I can find a way to replicate these behaviors in robots.
What obstacles need to be overcome to create such robots?
Oh, there are many obstacles. Since 2003, I have been working in the field of trying to create micro-robots. Initially, we were just trying to figure out how to make these things move and how to control them. Later, we started thinking about what functions they should achieve. What kinds of chemical or physical functionalities do we plan to add to these devices? Is there a way to give them some form of autonomy?
We are still investigating that last question. We have begun exploring polymers and materials that can react to their environment in some way, such as automatically changing their shape to navigate through narrow spaces, etc. But the biggest challenge is integrating all the different components. Successful micro-robots must be able to sense their environment and respond appropriately to complete a specific task.
Assuming we can achieve this, how do you envision micro-robots being used in the real world? How will they improve existing technologies?
I believe the first applications we will see will be in the medical field. This is a logical progression. We are already using increasingly smaller medical devices and robots for surgery; compared to other technologies, these medical tools can penetrate deeper into your body and cause less trauma, such as catheters that can reach deep into the brain to treat aneurysms or clear clots. In the future, we will continue to see further advancements in this technology, but there are limitations to how small we can make these devices.
Using advanced new materials, Nelson’s lab has developed tiny remotely controlled devices that can change shape and “swim” in response to magnetic fields. With such technology, it is possible to create micro-robots for drug delivery or performing medical procedures inside the human body. (Source: EPFL)
Naturally, the next step will be to enable micro-robots to enter small spaces within the body and initiate treatment at the early stages of disease. Imagine a device that can enter your lungs and detect and treat cancer before it spreads. Or treating blood clots deep in your brain, where catheters cannot reach — simple micro-robots could potentially access blocked areas and help clear them.
Such tasks sound quite complex. Do you need artificial intelligence to accomplish these tasks?
No, not for now. I mean, currently, it is not feasible to incorporate artificial intelligence into micro-robots. The amount of computation required for such small devices is too great. But if we can achieve that level, that would be so cool, and I am sure we could come up with some practical uses for it, although that is beyond my professional scope and may not happen in my lifetime.
However, it is worth noting that in this matter, we may not actually need something as powerful as artificial intelligence. You can still build a very useful micro-robot using simple intelligence and autonomous decision-making. If you have a micro-device that can recognize changes in the environment and alter its behavior accordingly, it can perform surprisingly complex tasks. For example, providing chemotherapy. If a micro-robot can detect the pH or temperature gradient of a tumor, it can slowly move in that direction and release highly toxic drugs directly to the cancerous tissue without affecting other parts of the body.
Devices like this may only possess microbial-level intelligence, but they could still be extremely effective for disease detection and drug delivery. As an engineer, I always keep this goal in mind: what is the most streamlined way I can design a machine to accomplish a task? It doesn’t have to play chess; it just needs to get the job done.
The renowned physicist Richard Feynman envisioned a future filled with micro-machines in his 1959 speech “There’s Plenty of Room at the Bottom.” In a video shot many years later, he revisited these concepts for new audiences. (Source: MUON RAY)
Do you think micro-robots will be commercially used in the near future? If so, how far away do you think we are from that goal?
Yes, everyone wants to know how long it will take! In the past, I always said we had five years to go. Now I would say three years. Although there is still a lot of uncertainty, the timeline is shortening. Others in the field are manufacturing electronic devices at increasingly smaller scales, embedding small transistors and other components directly into micro-robots and building circuits within them. We are beginning to realize that we can embed some basic computational elements directly into micro-robots.
The question is, how much computation will they ultimately need? How much onboard memory will they require? How much do you want them to learn? With our current technology, micro-robots will be very simple in the foreseeable future.
