✅ Author Introduction: A Matlab simulation developer passionate about research, skilled in data processing, modeling simulation, program design, obtaining complete code, reproducing papers, and scientific simulation.
🍎 Previous Review: Follow my personal homepage:Matlab Research Studio
🍊 Personal Motto: Investigate to gain knowledge, complete Matlab code and simulation consultation available via private message.
🔥 Content Introduction
Local path planning is a key component of robotic navigation systems, aimed at enabling robots to generate safe and efficient trajectories in real-time when facing dynamic and uncertain environments. This article will compare and analyze the current mainstream local path planning algorithms, including Dynamic Window Approach (DWA), Artificial Potential Field (APF), Rapidly-exploring Random Tree (RRT) and its variants, as well as sampling-based optimization algorithms. The article will delve into various dimensions such as algorithm principles, advantages and disadvantages, applicable scenarios, and computational complexity, aiming to provide theoretical basis and practical guidance for researchers and engineers in selecting appropriate local path planning algorithms for real-world applications.
Introduction
With the rapid development of robotic technology, its applications in industrial, service, medical, and military fields are becoming increasingly widespread. In these applications, the autonomous navigation capability of robots is a core element for achieving intelligence and autonomy. Path planning, as an important part of autonomous navigation, can generally be divided into global path planning and local path planning. Global path planning is responsible for generating a macro path from the starting point to the endpoint in a known map, while local path planning is responsible for real-time adjustment and optimization of the path during the robot’s movement based on local environmental information obtained from sensors, in order to avoid obstacles and safely and efficiently reach the target point in a dynamic environment.
The performance of local path planning algorithms directly affects the robot’s obstacle avoidance capability, motion smoothness, and task completion efficiency. Therefore, selecting the appropriate local path planning algorithm is crucial. This article will provide a detailed comparative analysis of several mainstream local path planning algorithms, including their principles, characteristics, applicable scenarios, and limitations.
Classification and Comparison of Local Path Planning Algorithms
There are many types of local path planning algorithms, which can be roughly classified into the following categories based on their principles and implementation methods:
1. Sampling-based Algorithms
Sampling-based algorithms construct search trees or graphs by randomly sampling points in the configuration space to find a collision-free path. The advantages of these algorithms are their ability to handle high-dimensional spaces and complex obstacle environments, but the disadvantages include high computational load and poor real-time performance.
a. Rapidly-exploring Random Tree (RRT) and its Variants
The RRT algorithm is a classic sampling-based path planning algorithm. It expands the search tree through random sampling until a node in the tree approaches the target point. The advantage of RRT is its probabilistic completeness, meaning that if a path exists, RRT will eventually find it. However, the paths generated by RRT are often not optimal and tend to be jagged, making them unsuitable for direct execution by robots.
To overcome the shortcomings of RRT, researchers have proposed various variants:
- RRT* (RRT-Star)**: The RRT algorithm introduces a reconnection mechanism based on RRT, which re-routes and selects parent nodes to make the generated path asymptotically optimal. Although RRT* has higher path quality, its computational complexity also increases, further reducing real-time performance.
- Bi-RRT (Bidirectional RRT): Bi-RRT simultaneously constructs two RRT trees starting from the start and target points, connecting them when they meet to form a path. This bidirectional search strategy can significantly reduce search time and improve efficiency.
- Anytime RRT (A-RRT): A-RRT is an anytime algorithm that can continuously improve path quality within a given time until the optimal path is found.
Advantages: Able to handle high-dimensional spaces and complex obstacles; probabilistic completeness.Disadvantages: High computational load, poor real-time performance; original RRT path quality is not high.Applicable Scenarios: Offline planning or scenarios with low real-time path requirements.
2. Potential Field-based Algorithms
The Artificial Potential Field (APF) method is an intuitive and computationally efficient local path planning method. It treats the target point as a source of attraction and obstacles as sources of repulsion, allowing the robot to move towards the target point while avoiding obstacles under the combined forces.
a. Artificial Potential Field (APF)
The core idea of APF is to construct a potential field function that is minimized at the target point and maximized near obstacles. The direction of the robot’s movement is determined by the negative gradient of the potential field.
Advantages: Simple algorithm, high computational efficiency, suitable for real-time obstacle avoidance.Disadvantages: Prone to getting stuck in local minima, causing the robot to halt; may exhibit oscillation in narrow passages; issues with target inaccessibility.Applicable Scenarios: Relatively simple environments with sparse obstacle distribution.
3. Optimization-based Algorithms
This type of algorithm transforms the path planning problem into an optimization problem, generating the optimal path by minimizing a certain cost function.
a. Dynamic Window Approach (DWA)
The Dynamic Window Approach (DWA) is one of the most commonly used and effective local path planning algorithms. It samples a series of velocities within the robot’s current feasible velocity space (dynamic window) and evaluates the trajectories corresponding to each velocity based on an evaluation function, ultimately selecting the optimal velocity pair to drive the robot’s movement. The evaluation function typically considers factors such as distance to the target point, distance to obstacles, and velocity magnitude.
Advantages: Good real-time performance, high computational efficiency; effectively avoids dynamic obstacles; generates smooth trajectories.Disadvantages: Prone to getting stuck in local optima; sensitive to the settings of evaluation function parameters; requires high measurement accuracy from sensors.Applicable Scenarios: Real-time obstacle avoidance in dynamic environments, such as indoor robot navigation and autonomous driving.
b. Gradient Descent Optimization Algorithms
In addition to DWA, there are some optimization algorithms directly based on gradient descent, such as trajectory optimization methods. These methods typically define a cost function that includes multiple terms for smoothness, obstacle avoidance, and target tracking, and then iteratively adjust trajectory points using gradient descent or other optimization methods to minimize the cost function.
Advantages: Can generate high-quality smooth trajectories; able to consider more constraints.Disadvantages: High computational complexity, poor real-time performance; prone to getting stuck in local optima.Applicable Scenarios: Scenarios with high trajectory quality requirements and sufficient computational resources, such as high-precision path following.
Conclusion and Outlook
- Multi-algorithm Fusion: Combining the advantages of different algorithms, such as integrating global path planning with local path planning, or fusing sampling-based algorithms with optimization-based algorithms to achieve better planning results.
- Application of Reinforcement Learning in Path Planning: With the rise of reinforcement learning technology, it shows great potential in the field of robotic path planning, allowing robots to autonomously adapt to complex dynamic environments through interaction with the environment.
- Considering Uncertainty: In real environments, there are uncertainties in sensor measurements, actuator control, and environmental models. Future research will focus more on how to incorporate uncertainty into path planning to improve the robustness of robots.
- Path Planning in Human-Robot Collaboration: In human-robot collaboration scenarios, the path planning of robots needs to consider human behavior and intentions to achieve more natural and safer interactions.
Conclusion
Local path planning is one of the key technologies for autonomous navigation of robots. This article provides a detailed comparative analysis of mainstream local path planning algorithms, including sampling-based, potential field-based, and optimization-based methods. By comparing their principles, advantages and disadvantages, and applicable scenarios, it aims to provide a comprehensive reference for researchers and engineers. As the application scenarios for robots become increasingly complex, the requirements for local path planning algorithms are also rising. Future research will continue to explore more efficient, robust, and intelligent path planning algorithms to advance robotic technology to new heights.
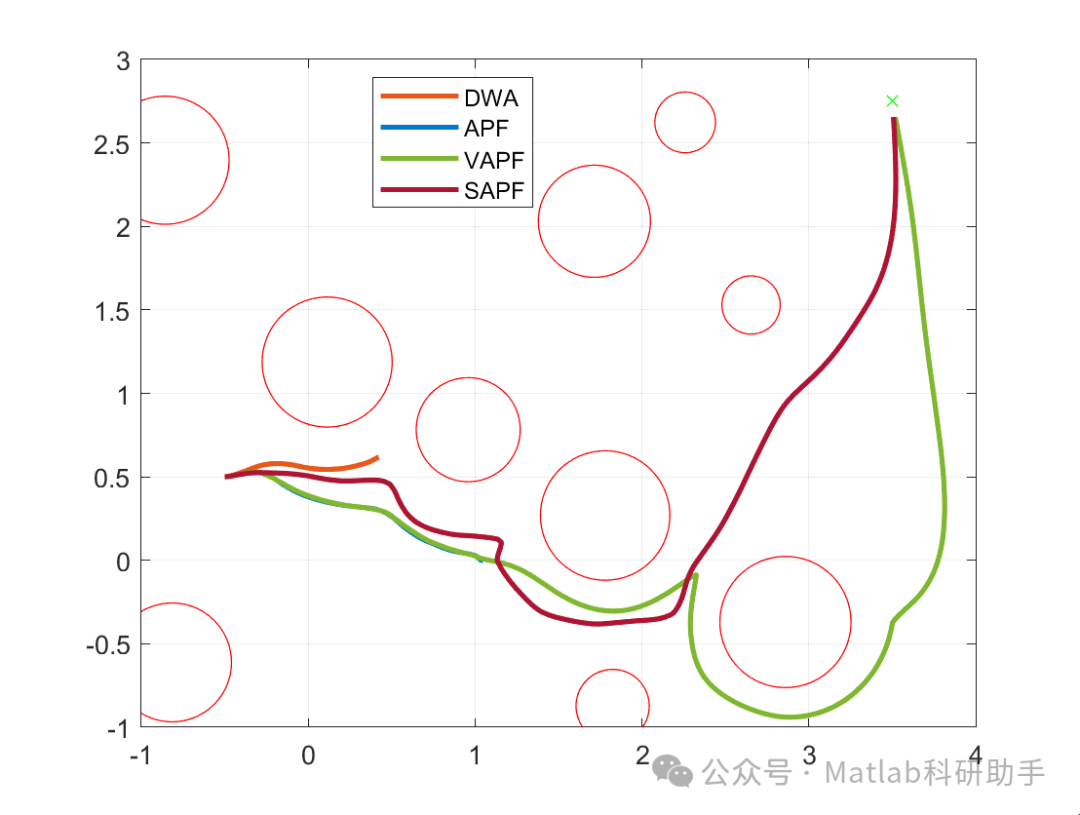
⛳️ Running Results
🔗 References
[1] Zhou Huapeng. Research on Local Path Planning Methods in Visual Navigation and Embedded Implementation [D]. Nanjing University of Aeronautics and Astronautics [2025-11-19]. DOI:10.7666/d.y1812237.
[2] Luo Cheng. Research on UAV Path Planning Algorithms [D]. Fudan University, 2010.
[3] Cao Ruyue, Zhang Zhenqian, Li Shichao, et al. Multi-machine Collaborative Global Path Planning Based on Improved A* Algorithm and Bezier Curves [J]. Journal of Agricultural Machinery, 2021, 52(S01):7.
📣 Partial Code
🎈 Some theoretical references are from online literature; if there is any infringement, please contact the author for deletion.
👇 Follow me to receive a wealth of Matlab e-books and mathematical modeling materials
🏆 Our team specializes in guiding customized MATLAB simulations in various research fields, helping to realize research dreams:
🌈 Various intelligent optimization algorithm improvements and applications
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, three-dimensional packing, logistics site selection, cargo position optimization, bus scheduling optimization, charging pile layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual domain base station and drone site selection optimization, knapsack problem, wind farm layout, time slot allocation optimization, optimal distributed generation unit allocation, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency life material distribution center site selection, base station site selection, road lamp column arrangement, hub node deployment, transmission line typhoon monitoring devices, container scheduling, unit optimization, investment optimization portfolio, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-layer vehicle path planning (2E-VRP), electric vehicle path planning (EVRP), hybrid vehicle path planning, mixed flow workshop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection path planning problem, port scheduling, port bridge scheduling, parking space allocation, airport flight scheduling, leak source localization.
🌈 Machine learning and deep learning time series, regression, classification, clustering, and dimensionality reduction
2.1 BP time series, regression prediction, and classification
2.2 ENS voice neural network time series, regression prediction, and classification
2.3 SVM/CNN-SVM/LSSVM/RVM support vector machine series time series, regression prediction, and classification
2.4 CNN|TCN|GCN convolutional neural network series time series, regression prediction, and classification
2.5 ELM/KELM/RELM/DELM extreme learning machine series time series, regression prediction, and classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU gated neural network time series, regression prediction, and classification
2.7 Elman recurrent neural network time series, regression prediction, and classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/long short-term memory neural network series time series, regression prediction, and classification
2.9 RBF radial basis neural network time series, regression prediction, and classification
2.10 DBN deep belief network time series, regression prediction, and classification
2.11 FNN fuzzy neural network time series, regression prediction
2.12 RF random forest time series, regression prediction, and classification
2.13 BLS broad learning system time series, regression prediction, and classification
2.14 PNN pulse neural network classification
2.15 Fuzzy wavelet neural network prediction and classification
2.16 Time series, regression prediction, and classification
2.17 Time series, regression prediction, and classification
2.18 XGBOOST ensemble learning time series, regression prediction, and classification
2.19 Transform various combinations of time series, regression prediction, and classification
Covering wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load prediction, stock price prediction, PM2.5 concentration prediction, battery health status prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal identification, precise prediction of subway stops, transformer fault diagnosis.
🌈 Image Processing Aspects
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compressed sensing.
🌈 Path Planning Aspects
Traveling Salesman Problem (TSP), Vehicle Routing Problem (VRP, MVRP, CVRP, VRPTW, etc.), UAV three-dimensional path planning, UAV collaboration, UAV formation, robot path planning, grid map path planning, multimodal transport problems, electric vehicle path planning (EVRP), two-layer vehicle path planning (2E-VRP), hybrid vehicle path planning, ship trajectory planning, full path planning, warehouse patrol.
🌈 UAV Application Aspects
UAV path planning, UAV control, UAV formation, UAV collaboration, UAV task allocation, UAV secure communication trajectory online optimization, vehicle collaborative UAV path planning.
🌈 Communication Aspects
Sensor deployment optimization, communication protocol optimization, routing optimization, target localization optimization, Dv-Hop localization optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI localization optimization, underwater communication, communication upload and download allocation.
🌈 Signal Processing Aspects
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, electromyography signals, electroencephalography signals, signal timing optimization, electrocardiogram signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection.
🌈 Power System Aspects
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity.
🌈 Cellular Automata Aspects
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion.
🌈 Radar Aspects
Kalman filter tracking, trajectory association, trajectory fusion, SOC estimation, array optimization, NLOS identification.
🌈 Workshop Scheduling
Zero-wait flow shop scheduling problem (NWFSP), permutation flow shop scheduling problem (PFSP), hybrid flow shop scheduling problem (HFSP), zero idle flow shop scheduling problem (NIFSP), distributed permutation flow shop scheduling problem (DPFSP), blocking flow shop scheduling problem (BFSP).
👇