✅ Author’s Profile: A Matlab simulation developer passionate about research, skilled in data processing, modeling simulation, program design, obtaining complete code, reproducing papers, and scientific simulation.
🍎 Previous reviews, follow the personal homepage:Matlab Research Studio
🍊 Personal motto: Investigate to gain knowledge, complete Matlab code and simulation consultation available via private message.
🔥 Content Introduction
Dynamic path planning is a crucial research direction in fields such as robotics, traffic management, logistics, and military applications. Unlike static path planning, which assumes a completely known and unchanging environment, dynamic path planning deals with a constantly changing or partially unknown environment. In such complex and uncertain scenarios, the system must be able to perceive environmental changes in real-time and quickly adjust or replan paths to respond to sudden events or new task requirements.
The core challenge of dynamic path planning lies in the real-time nature and uncertainty of the environment. Obstacles in the environment may be moving, such as vehicles, pedestrians, or drones; they may also appear suddenly, such as construction zones, traffic accidents, or natural disasters. Additionally, noise in sensor data, localization errors, and limitations in computational resources add extra complexity to dynamic path planning. Therefore, an effective dynamic path planning system must consider not only the length, safety, and smoothness of the path but also the real-time performance and robustness of the algorithm.
Currently, research on dynamic path planning mainly focuses on several aspects. First is environmental perception and modeling. This includes using various sensors such as LiDAR, cameras, and ultrasonic sensors to gather environmental information and constructing environmental maps using SLAM (Simultaneous Localization and Mapping) technology. In dynamic environments, real-time updates of the map are particularly important, requiring algorithms to quickly identify and integrate new obstacle information and even predict the motion trajectories of obstacles. Representation methods based on grid maps, topological maps, or feature maps are widely used in dynamic path planning.
Secondly, path search and optimization algorithms. Traditional algorithms like A* and Dijkstra perform well in static environments but need improvements in dynamic environments. For example, incremental search algorithms like D* Lite and FMT* can efficiently update existing path information when the environment changes, rather than starting the search from scratch. Additionally, sampling-based algorithms such as RRT (Rapidly-exploring Random Tree) and its variants excel in handling high-dimensional spaces and complex obstacles by quickly exploring the state space to find feasible paths. In recent years, reinforcement learning has also provided new ideas for dynamic path planning, learning adaptive path planning strategies through the interaction of agents with the environment.
Furthermore, obstacle avoidance strategies and decision-making are crucial. In dynamic path planning, avoiding obstacles involves not only circumventing static obstacles but also safely avoiding moving obstacles to prevent collisions. This involves predicting the motion intentions of obstacles and coordinating one’s own movement. For instance, the Velocity Obstacle method can calculate all possible velocity vectors that could lead to a collision, guiding the agent to choose a safe direction of movement. Model Predictive Control (MPC) optimizes the current control input by predicting the system’s behavior and environmental changes over a future time horizon, achieving smoother and safer obstacle avoidance.
Finally, multi-agent collaborative planning is essential. In applications such as traffic management and drone formations, multiple agents need to work collaboratively in a shared environment, avoiding mutual collisions while completing tasks together. This requires consideration of communication, coordination, and conflict resolution among agents. Decentralized planning methods allow each agent to plan independently and resolve conflicts through information sharing; centralized planning is coordinated by a central controller overseeing the actions of all agents.
Despite significant progress in dynamic path planning, many challenges remain. For example, ensuring the real-time performance and safety of path planning in highly dynamic and unpredictable environments is still a challenge. Additionally, how to achieve efficient algorithm deployment and operation in resource-constrained embedded systems requires further research. Future research directions may include more robust environmental perception and prediction technologies, hybrid planning methods combining deep learning and reinforcement learning, and more robust and interpretable decision systems.
Dynamic path planning is a complex and vibrant research field. With the continuous development of artificial intelligence, robotics, and sensor technologies, we have reason to believe that future dynamic path planning systems will be better equipped to tackle various challenges and play a significant role in a wider range of applications.
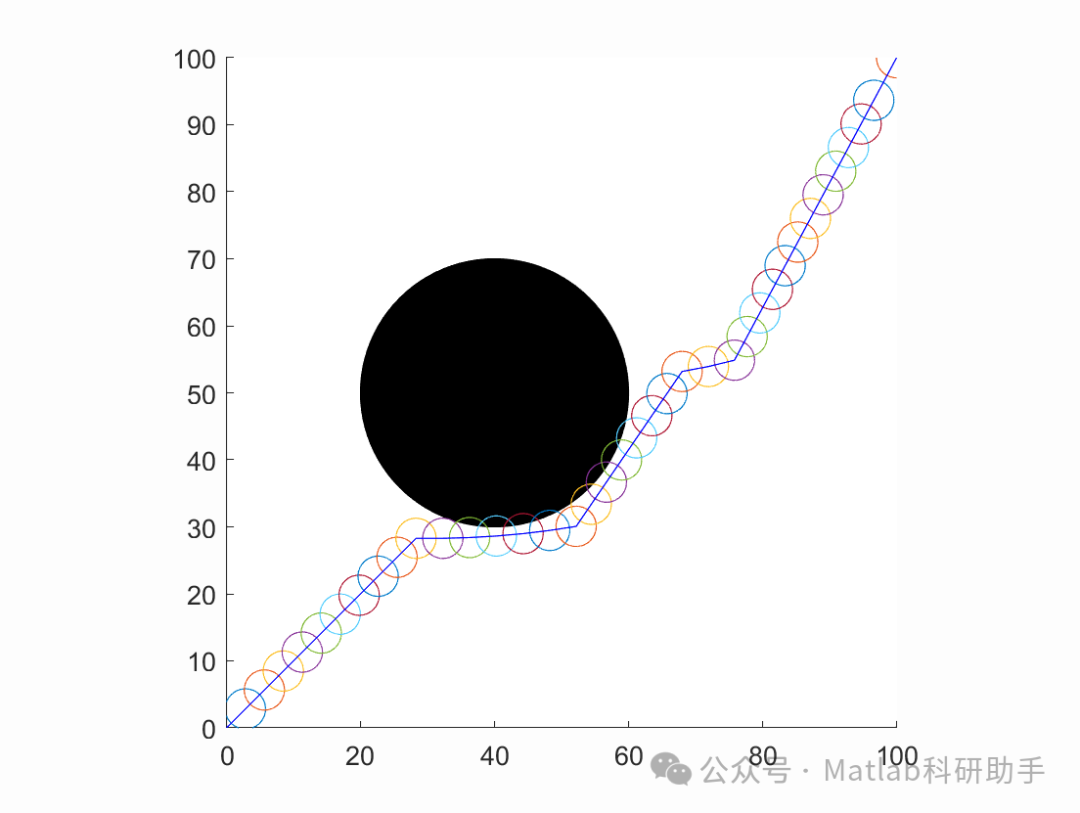
⛳️ Results
🔗 References
[1] Lei Yanmin, Zhu Qidan, Feng Zhibin. Dynamic path planning based on velocity obstacles and behavioral dynamics [J]. Journal of Huazhong University of Science and Technology: Natural Science Edition, 2011, 39(4):5. DOI: CNKI:42-1658/N.20110425.1140.004.
[2] Xiong Kaifeng, Zhang Hua. Path planning for mobile robots based on actual membership functions in dynamic environments [J]. Science and Technology Bulletin, 2015, 31(9):6. DOI: 10.3969/j.issn.1001-7119.2015.09.039.
[3] Cui Jinjun. Research on path planning of mobile robots based on genetic algorithms [D]. Nanjing Normal University, 2009. DOI: 10.7666/d.d183260.
📣 Sample Code
🎈 Some theoretical references are from online literature; please contact the author for removal if there is any infringement.
👇 Follow me to receive a wealth of Matlab e-books and mathematical modeling materials
🏆 Our team specializes in guiding customized Matlab simulations in various research fields, helping to realize research dreams:
🌈 Various intelligent optimization algorithm improvements and applications
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, three-dimensional packing, logistics site selection, cargo location optimization, bus scheduling optimization, charging station layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual domain base station and drone site selection optimization, knapsack problem, wind farm layout, time slot allocation optimization, optimal distributed generation unit allocation, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency supply distribution center site selection, base station site selection, road lamp column arrangement, hub node deployment, transmission line typhoon monitoring devices, container scheduling, unit optimization, investment portfolio optimization, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-layer vehicle path planning (2E-VRP), electric vehicle path planning (EVRP), hybrid vehicle path planning, mixed flow shop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection path planning problem, port scheduling, port bridge scheduling, parking space allocation, airport flight scheduling, leak source localization
🌈 Machine learning and deep learning time series, regression, classification, clustering, and dimensionality reduction
2.1 BP time series, regression prediction, and classification
2.2 ENS voice neural network time series, regression prediction, and classification
2.3 SVM/CNN-SVM/LSSVM/RVM support vector machine series time series, regression prediction, and classification
2.4 CNN|TCN|GCN convolutional neural network series time series, regression prediction, and classification
2.5 ELM/KELM/RELM/DELM extreme learning machine series time series, regression prediction, and classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU gated neural network time series, regression prediction, and classification
2.7 Elman recurrent neural network time series, regression prediction, and classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM long short-term memory neural network series time series, regression prediction, and classification
2.9 RBF radial basis function neural network time series, regression prediction, and classification
2.10 DBN deep belief network time series, regression prediction, and classification
2.11 FNN fuzzy neural network time series, regression prediction
2.12 RF random forest time series, regression prediction, and classification
2.13 BLS broad learning system time series, regression prediction, and classification
2.14 PNN pulse neural network classification
2.15 Fuzzy wavelet neural network prediction and classification
2.16 Time series, regression prediction, and classification
2.17 Time series, regression prediction, and classification
2.18 XGBOOST ensemble learning time series, regression prediction, and classification
2.19 Transform various combinations of time series, regression prediction, and classification
Directions cover wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load forecasting, stock price prediction, PM2.5 concentration prediction, battery health status prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal identification, precise subway parking prediction, transformer fault diagnosis
🌈 In image processing
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compressed sensing
🌈 In path planning
Traveling salesman problem (TSP), vehicle routing problem (VRP, MVRP, CVRP, VRPTW, etc.), three-dimensional path planning for drones, drone collaboration, drone formations, robot path planning, grid map path planning, multimodal transport problems, electric vehicle path planning (EVRP), two-layer vehicle path planning (2E-VRP), hybrid vehicle path planning, ship trajectory planning, full path planning, warehouse patrol
🌈 In drone applications
Drone path planning, drone control, drone formations, drone collaboration, drone task allocation, drone safe communication trajectory online optimization, vehicle collaborative drone path planning
🌈 In communication
Sensor deployment optimization, communication protocol optimization, routing optimization, target localization optimization, Dv-Hop localization optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI localization optimization, underwater communication, communication upload and download allocation
🌈 In signal processing
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, EMG signals, EEG signals, signal timing optimization, ECG signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection
🌈 In power systems
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity
🌈 In cellular automata
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion
🌈 In radar
Kalman filter tracking, track association, track fusion, SOC estimation, array optimization, NLOS identification
🌈 In workshop scheduling
Zero-wait flow shop scheduling problem (NWFSP), permutation flow shop scheduling problem (PFSP), hybrid flow shop scheduling problem (HFSP), zero idle flow shop scheduling problem (NIFSP), distributed permutation flow shop scheduling problem (DPFSP), blocking flow shop scheduling problem (BFSP)
👇