Application: Retrieve the robot’s current position to display on a touchscreen,IOT platform, etc., for data presentation.
Function Introduction: Outputs the robot’s current vertical intersection position (base coordinate value) to a specified buffer.
Method 1: Robot’s Current Vertical Intersection Position
[Unit:mm], [Unit:deg]
1, Flip to find settings, parameter-S1CxG
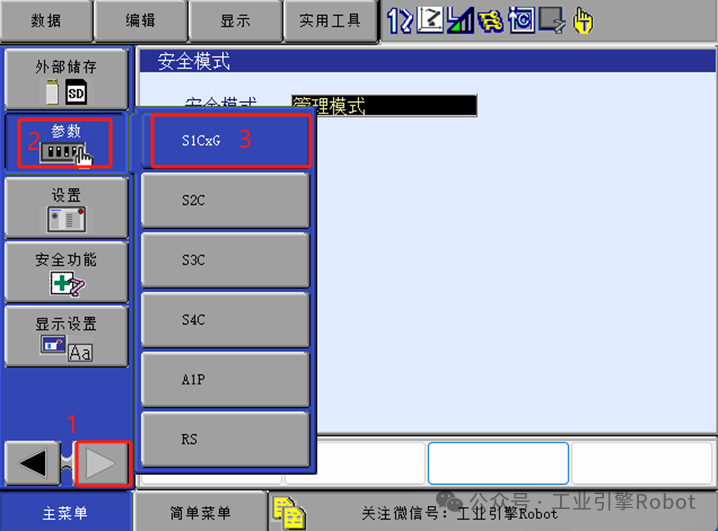
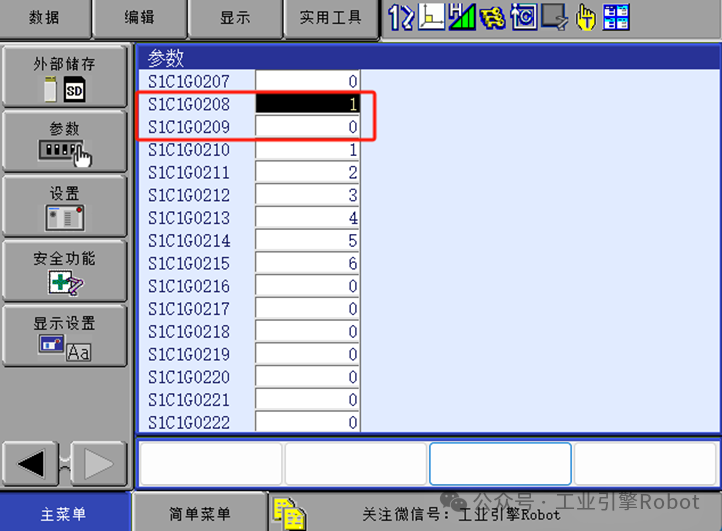
2, Enable function parameter
Set parameterS1C1G208=1, the output function for the current vertical intersection position (base coordinate value) command value cache is enabled.
S1C1G209=0, Cache output size specified 0: double-byte output
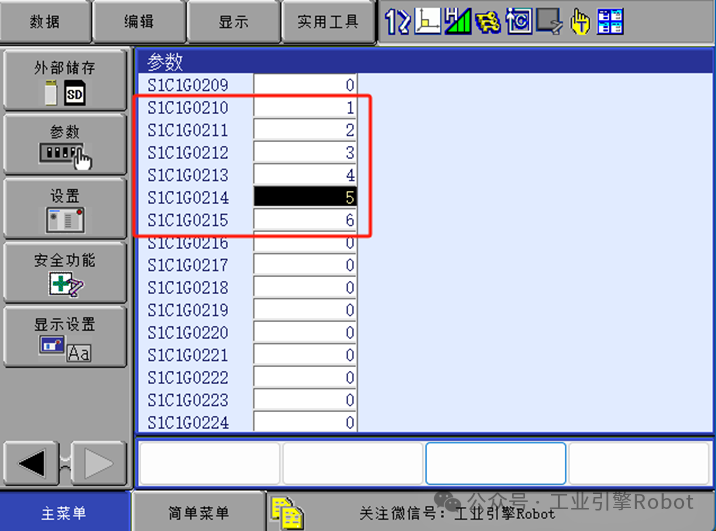
3, Set write register parameters
Set the following parameters
S1C1G210Vertical intersection position (command value)X output object cache number
S1C1G211Vertical intersection position (command value)Y output object cache number
S1C1G212Vertical intersection position (command value)Z output object cache number
S1C1G213Vertical intersection position (command value)Rx output object cache number
S1C1G214Vertical intersection position (command value)Ry output object cache number
S1C1G215Vertical intersection position (command value)Rz output object cache number
S1C1G 216Vertical intersection position (command value)Re (external axis) output object cache number
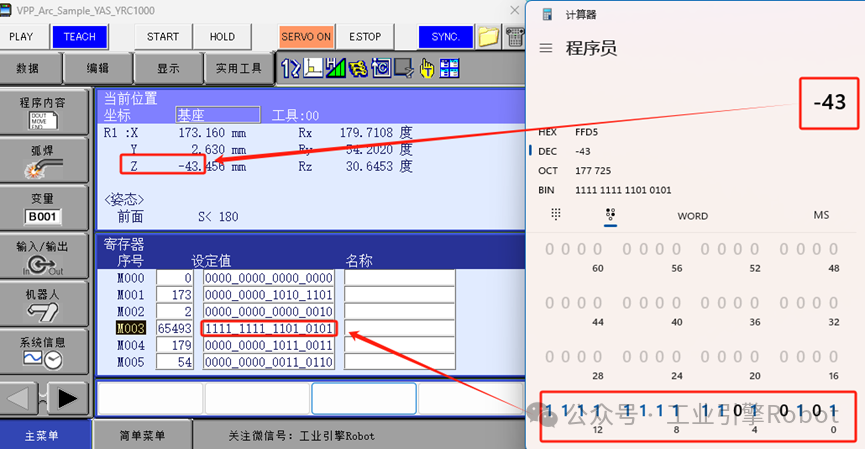
As shown: Write the current position to registersM1-M6
Note: The command value cache output function must be set to valid(S1CxG208=1) and each coordinate value output cache number must be set(S1CxG210~216).
4Display of Results
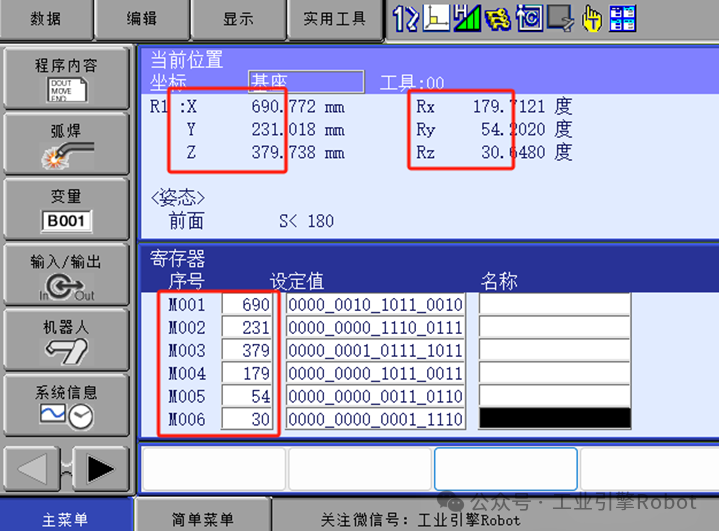
Note: When the data is negative, conversion is required, the conversion method is shown in the figure.
Method 2: Cache output size specified 0 : double-byte output 1 :4 byte output
[Unit:μm][Unit:0.0001deg]
1.Enable function parameter
S1C1G217=1 The current vertical intersection position (base coordinate value)FB value cache output function is enabled.
S1C1G218=1 Cache output size specified4 byte output.

2, Set write register parameters
Set the following parameters
S1C1G219Vertical intersection position (FB value)X output object cache number
S1C1G 220Vertical intersection position (FB value)Y output object cache number
S1C1G 221Vertical intersection position (FB value)Z output object cache number
S1C1G 222Vertical intersection position (FB value)Rx output object cache number
S1C1G 223Vertical intersection position (FB value)Ry output object cache number
S1C1G 224Vertical intersection position (FB value)Rz output object cache number
S1C1G 225Vertical intersection position (FB value)Re (external axis) output object cache number
As shown: Write the current position to registersM10-M20

3Display of Results
Unit conversion is required, the conversion relationship is shown in the figure

Finally
Thank you for your attention, shares, and likes.
If you want to learn more about Yaskawa robots, please leave a message below!