The application of wheeled robots is very extensive, such as UGVs, hotel delivery robots, etc., involving mechanics, hardware, and software algorithms. They possess basic mobility and steering functions and can carry various sensors to achieve autonomous obstacle avoidance. Building a wheeled robot is a great way to learn about robotics technology.This article summarizes domestic and international open-source projects for wheeled robots, helping robotics enthusiasts learn and get started with robotics.01 | OpenBotOpenBot is an open-source robot from Intel that uses a smartphone as the computing platform for the robot, capable of following people and real-time autonomous navigation, with a cost of about $50 excluding the smartphone.The entire robot consists of a chassis, wheels, smartphone, battery, motors, motor drivers, Arduino, speed sensors, ultrasonic sensors, and LEDs. Paper link:https://arxiv.org/pdf/2008.10631GitHub link:https://github.com/ob-f/OpenBotCost:
Paper link:https://arxiv.org/pdf/2008.10631GitHub link:https://github.com/ob-f/OpenBotCost: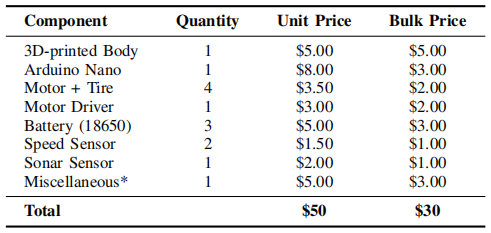 Mechanical structure design:
Mechanical structure design: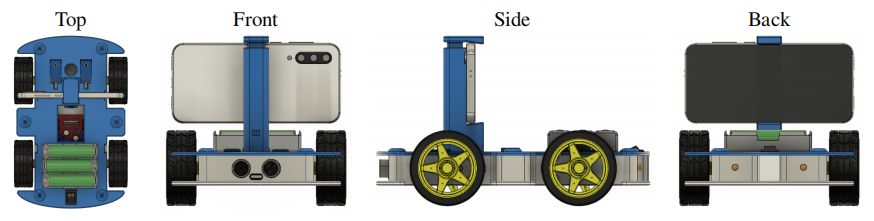 Hardware design:
Hardware design: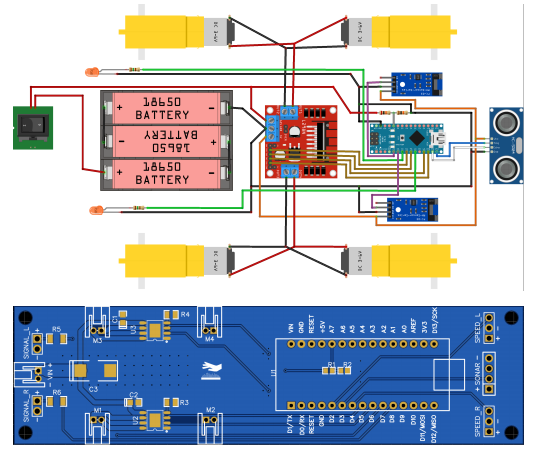 Software design:
Software design: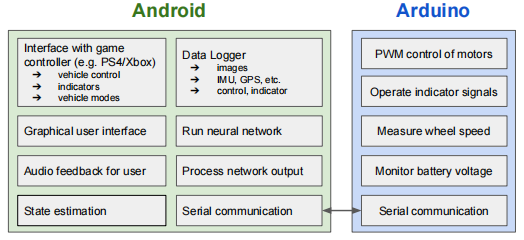 02 | NewBotThe NewBot is an open-source robot that integrates voice interaction, image recognition, and mobile navigation.
02 | NewBotThe NewBot is an open-source robot that integrates voice interaction, image recognition, and mobile navigation. Hardware architecture:
Hardware architecture: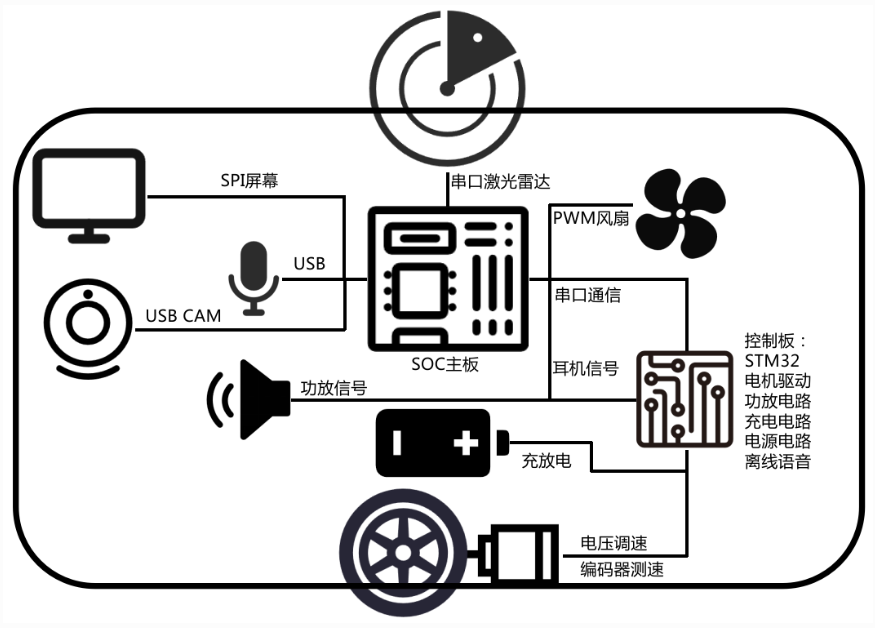 Hardware specifications:Product model: newbot1.0 Main chip SOC: Rockchip RK3566 CPU: Quad-core 64-bit Cortex-A55 1.8GHz NPU: 1T computing power, supports TensorFlow/ONNX/PyTorch model conversion VPU: H.264/H.265/JPEG hardware encoding and decoding RAM: LPDDR4 2GB ROM: eMMC 32GB Wi-Fi + Bluetooth: Wi-Fi 5 + BT 5.0 Control chip MCU: STM32F103C8T6 Battery capacity: two 18650 batteries totaling 7000mAh 3.7V Robot dimensions: diameter 12cm, height about 10cm Camera resolution: 1280×800 30FPSScreen size: 1.28-inch SPI circular screen Operating system: Ubuntu 20.04 ROS version: ROS1 Noetic Project documentation:https://newbot.readthedocs.ioGitee link:https://gitee.com/cv-robot/newbot03 | ROS_CARROS_CAR is a wheeled robot based on Jetson Nano and ROS.
Hardware specifications:Product model: newbot1.0 Main chip SOC: Rockchip RK3566 CPU: Quad-core 64-bit Cortex-A55 1.8GHz NPU: 1T computing power, supports TensorFlow/ONNX/PyTorch model conversion VPU: H.264/H.265/JPEG hardware encoding and decoding RAM: LPDDR4 2GB ROM: eMMC 32GB Wi-Fi + Bluetooth: Wi-Fi 5 + BT 5.0 Control chip MCU: STM32F103C8T6 Battery capacity: two 18650 batteries totaling 7000mAh 3.7V Robot dimensions: diameter 12cm, height about 10cm Camera resolution: 1280×800 30FPSScreen size: 1.28-inch SPI circular screen Operating system: Ubuntu 20.04 ROS version: ROS1 Noetic Project documentation:https://newbot.readthedocs.ioGitee link:https://gitee.com/cv-robot/newbot03 | ROS_CARROS_CAR is a wheeled robot based on Jetson Nano and ROS. GitHub link:https://github.com/mailonghua/ROS_CARBilibili link:https://www.bilibili.com/video/BV1bZ4y1f7SZ/?spm_id_from=333.999.0.0&vd_source=1cfd5de3ea06d23f96940a992fd6da7a
GitHub link:https://github.com/mailonghua/ROS_CARBilibili link:https://www.bilibili.com/video/BV1bZ4y1f7SZ/?spm_id_from=333.999.0.0&vd_source=1cfd5de3ea06d23f96940a992fd6da7a Hardware architecture:
Hardware architecture: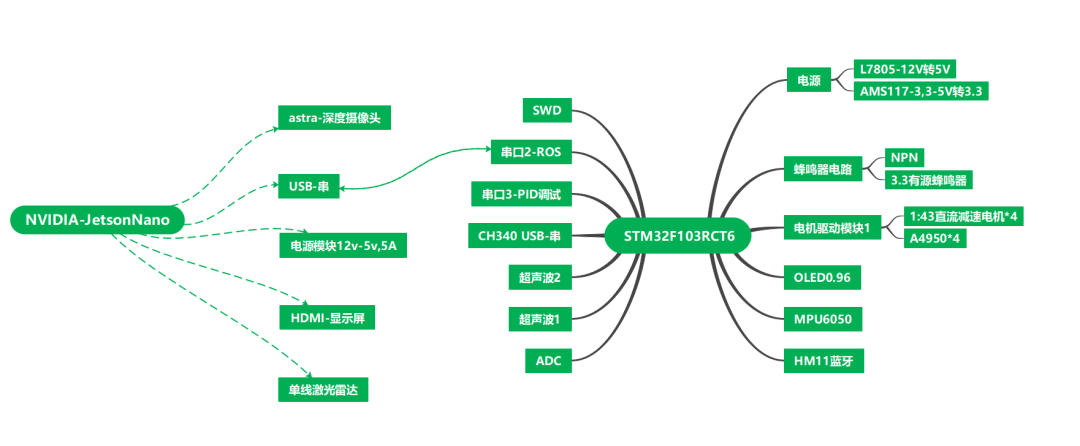 The hardware consists of two parts: a control layer based on STM32 and a ROS layer based on Jetson Nano.The STM32 control layer drives the motors, while the ROS layer on Jetson Nano connects to the depth camera and LiDAR. The STM32 communicates with the Jetson Nano via serial port.Software architecture:The software consists of two parts: motor control and Mecanum wheel kinematics calculation based on STM32, and ROS navigation based on Jetson Nano.STM32:
The hardware consists of two parts: a control layer based on STM32 and a ROS layer based on Jetson Nano.The STM32 control layer drives the motors, while the ROS layer on Jetson Nano connects to the depth camera and LiDAR. The STM32 communicates with the Jetson Nano via serial port.Software architecture:The software consists of two parts: motor control and Mecanum wheel kinematics calculation based on STM32, and ROS navigation based on Jetson Nano.STM32: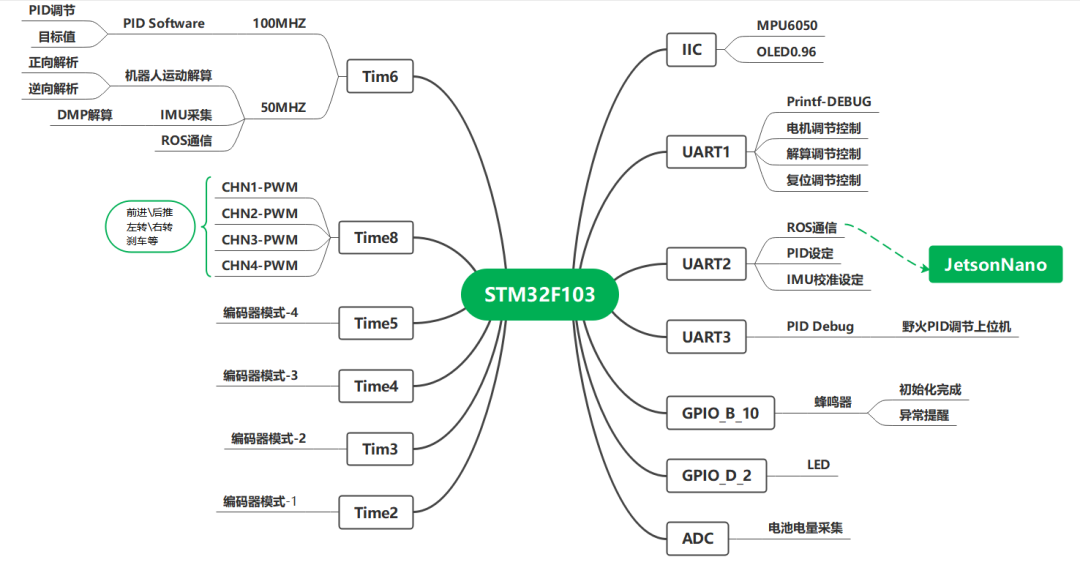 ROS:
ROS: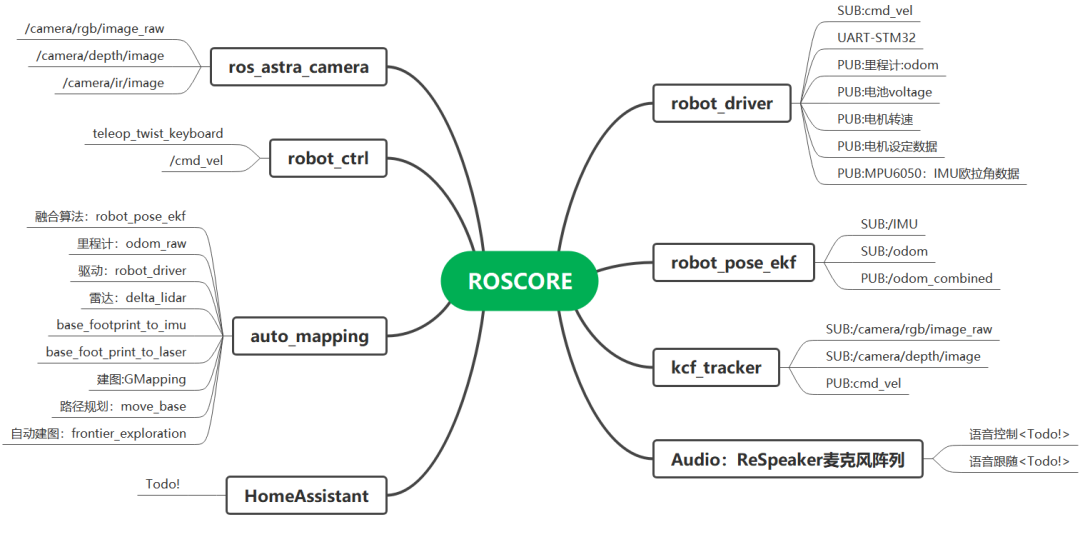 04 | OpenPodCarOpenPodCar is an open-source autonomous vehicle research platform developed by a joint research team from the University of Leeds and the University of Lincoln.
04 | OpenPodCarOpenPodCar is an open-source autonomous vehicle research platform developed by a joint research team from the University of Leeds and the University of Lincoln. The project includes:
The project includes:
- Hardware design and instructions for building a physical car
- Arduino software for speed control
- Pololu software for steering control
- ROS drivers for overall steering and speed control
- Gazebo 3D simulation
- Integration of move_base and gmapping
Paper link:https://arxiv.org/pdf/2205.04454GitHub link:https://github.com/OpenPodcar/OpenPodcar05 | Mini UGVMini UGV is an open-source four-wheeled UGV project for indoor environments. It measures 23.5cm in length, 15.5cm in width, and 8.5cm in height. It is driven by 8 FOC motors and can achieve independent steering for all four wheels, with STM32 as the main control unit, controlled via a remote control. Hardware open-source link:https://oshwhub.com/zhang_sai/four-wheel-trolley-miniugvBilibili link:https://www.bilibili.com/video/BV1Bm78zCEnX?spm_id_from=333.788.videopod.sections&vd_source=1cfd5de3ea06d23f96940a992fd6da7a06 | D-BOTD-BOT is an open-source two-wheeled balancing car, with software developed based on the author’s previous open-source project X-Knob. X-Knob is an open-source smart knob screen project that operates the screen through rotation, and in the D-BOT project, two motors are used as the knob.
Hardware open-source link:https://oshwhub.com/zhang_sai/four-wheel-trolley-miniugvBilibili link:https://www.bilibili.com/video/BV1Bm78zCEnX?spm_id_from=333.788.videopod.sections&vd_source=1cfd5de3ea06d23f96940a992fd6da7a06 | D-BOTD-BOT is an open-source two-wheeled balancing car, with software developed based on the author’s previous open-source project X-Knob. X-Knob is an open-source smart knob screen project that operates the screen through rotation, and in the D-BOT project, two motors are used as the knob.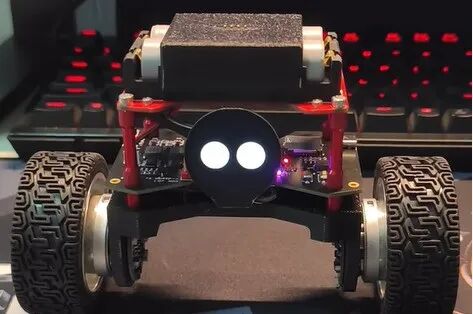 D-BOT can be controlled via a game controller or through voice commands.D-BOT has the following features:
D-BOT can be controlled via a game controller or through voice commands.D-BOT has the following features:
- Supports X-Knob rotary screen
- Wireless parameter adjustment
- Game controller control
- AI voice control
Hardware list:
- 5 PCBs: main control board + driver board * 2 + screen board + battery board
- MCU: ESP32-S3 WROOM-1U-N16R8
- Screen: 240×240 circular LCD GC9A01 (1.28 inches)
- Magnetic encoder: MT6701CT
- Motor: 3205b brushless DC motor (infinite position)
GitHub link:https://github.com/SmallPond/D-BOTHardware open-source link:https://oshwhub.com/dingmos/kbc3D model file link:https://makerworld.com.cn/zh/models/1061527-d-bot-ge-ke-ai-kong-zhi-de-wu-shua-ping-heng-che-x#profileId-110049207 | mini-smart-carmini-smart-car is an open-source autonomous vehicle that features LiDAR mapping, automatic following, and visual recognition capabilities. The main control uses ESP32, and to complete the project at the lowest cost, the author runs the ROS system on a remote computer, communicating with the car via Wi-Fi.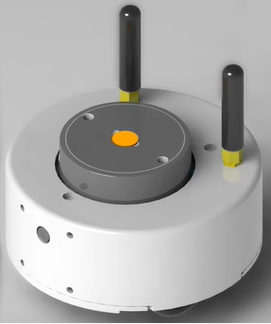 This autonomous vehicle has the following features:
This autonomous vehicle has the following features:
- Can be controlled via a mobile app
- LiDAR 2D mapping and navigation
- LiDAR target tracking
- HSV color block tracking using a camera
- Target recognition using a camera
Hardware open-source link:https://oshwhub.com/liguanxi/mini-smart-carBilibili link:https://www.bilibili.com/video/BV1WZspefERu/?spm_id_from=333.1391.0.0&vd_source=1cfd5de3ea06d23f96940a992fd6da7a08 | mini_balancecarmini_balancecar is an open-source FOC brushless balancing car, with the main control chip being AT32.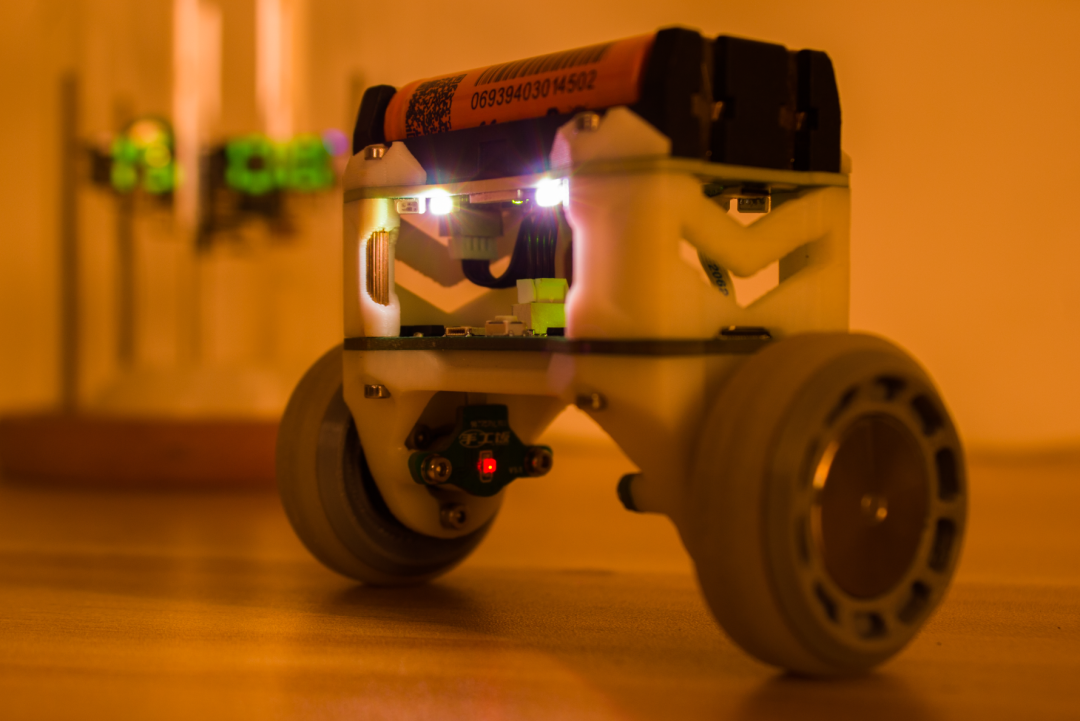 Hardware open-source link:https://oshwhub.com/nokia82/mini_balancecarBilibili link:https://www.bilibili.com/video/BV1KM411T79E/?spm_id_from=333.788.recommend_more_video.18&vd_source=1cfd5de3ea06d23f96940a992fd6da7a09 | DonkeyCarDonkeyCar is an open-source modular Python autonomous driving library.This project helps developers build smart cars using Raspberry Pi as the main control chip.
Hardware open-source link:https://oshwhub.com/nokia82/mini_balancecarBilibili link:https://www.bilibili.com/video/BV1KM411T79E/?spm_id_from=333.788.recommend_more_video.18&vd_source=1cfd5de3ea06d23f96940a992fd6da7a09 | DonkeyCarDonkeyCar is an open-source modular Python autonomous driving library.This project helps developers build smart cars using Raspberry Pi as the main control chip.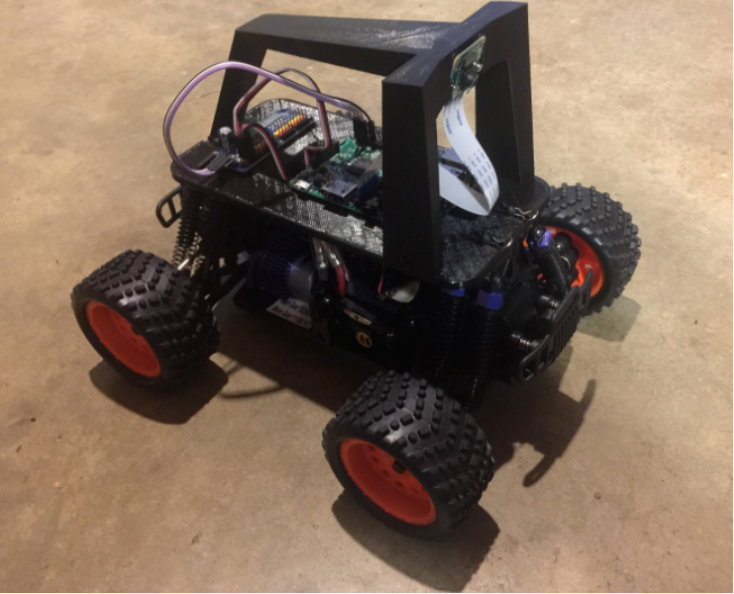 Project documentation:https://docs.donkeycar.com/GitHub link:https://github.com/autorope/donkeycar
Project documentation:https://docs.donkeycar.com/GitHub link:https://github.com/autorope/donkeycar