With just10 days, can one DIY a RISC-V car? Gu Jiaqi, an intern from the Chaochen Project’s Chengfeng Team, delivered a surprising answer. From February 8, during the Spring Festival holiday, to February 18, when he completed the assembly of a prototype equipped with the Xuantie TH1520 chip, Gu Jiaqi arrived at the Xuantie Conference on February 28 with this full-stack RISC-V smart car MiracRV.

Currently a senior in college, Gu Jiaqi has established a drone base on campus, and learning new skills through exploration is his usual method of study.As an electronics enthusiast, Gu Jiaqi has a history of hardcore modifications. As early as the end of 2024, he completed an interesting attempt to “mod a racing drone into a RISC-V drone.” In early 2025, inspired by the Xuantie RISC-V car, new ideas gradually took shape: to build a RISC-V mobile platform from scratch.
Given the high cost of purchasing car chassis on the market and the insufficient compatibility with RISC-V development boards, Gu Jiaqi ultimately chose to design the upper and lower aluminum plates of the car himself. After two days of intensive modeling and design, he finally obtained the finished product after cutting and manufacturing. The upper layer of this double-layer aluminum plate integrates a laser radar expansion interface and is custom optimized for RISC-V series development boards, while adapting to the hole positions of Milk-V Meles/LicheePi 4A development boards; the lower layer reserves holes for flight control, motor mounting, suspension bearing, etc. This “three-in-one“ design not only reduces development costs but also leaves room for future functional expansion.
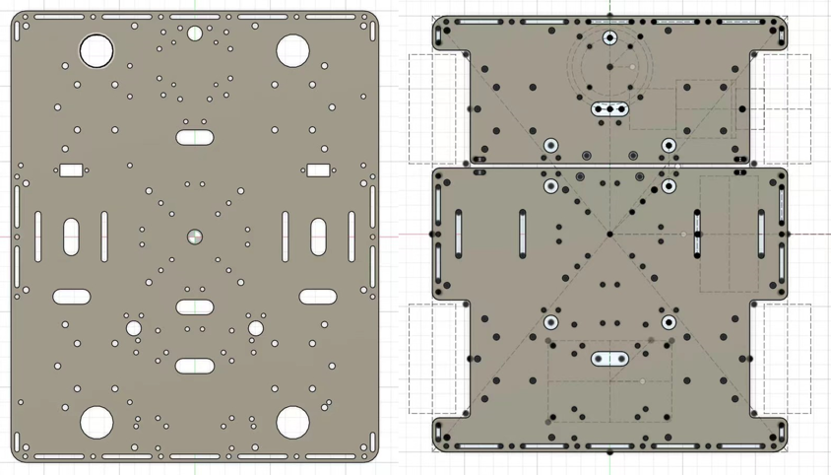
Design drawings of the upper and lower aluminum plates by Gu Jiaqi
The connection plate for the brushless motor and reducer is one of the important components of the car’s power system. Initially, Gu Jiaqi used a traditional four independent electronic speed controller (ESC) driving four motors scheme, but found that the split architecture had issues such as redundant and messy wiring and low space utilization during actual deployment. Based on this, he ultimately turned to a more compact four-in-one ESC scheme for reconstruction.
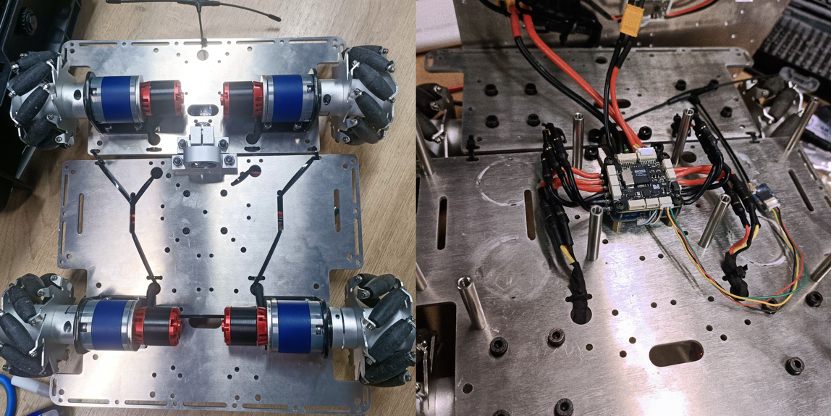
Modifying the split ESC to a four-in-one ESC
The DIY process was not smooth; every breakthrough involved a process of repeated trial and error. During the modification of the power unit, due to the inability to find a suitable combination of brushless motor + reducer, Gu Jiaqi chose to purchase a brushless motor with a 3.5mm output shaft and a reducer for DC motors, and designed a connection plate to splice the brushless motor and reducer, successfully assembling a brushless reducer motor module. Gu Jiaqi stated that this solution is cost-effective and, because it uses a model aircraft brushless motor, the speed is relatively stable. It can also directly reuse the flight control and ESC from the drone.
After multiple rounds of scheme verification, Gu Jiaqi finally finalized the car assembly scheme: the power system uses an N2830 1300KV brushless motor paired with a 27:1 reducer, achieving precise speed control through the AM32 four-in-one ESC; the control core is equipped with the Milk-V Meles development board based on the Xuantie TH1520 chip, running the RuyiSDK on the RevyOS system; the motion module uses omnidirectional mecanum wheels to enhance maneuverability, while the navigation system relies on the MicoAir MicoAir743 V2 flight control platform, paired with self-compiled ArduRover car firmware to complete motion control.Gu Jiaqi named this car MiracRV, which incorporates the meaning of “Qi Ji” in his name, hoping that the MiracRV project can validate the technical potential of RISC-V in the field of mobile robotics and provide replicable practical samples for developers exploring RISC-V applications.

The first generation of MiracRV
As of March 1, Gu Jiaqi successfully deployed the complete ROS 2 Humble software package on the Milk-V Meles development board based on RevyOS. Although the laser radar driver adaptation has not been completed due to time constraints, MiracRV already has basic motion control capabilities, laying the foundation for subsequent SLAM navigation development. In the future, Gu Jiaqi will fully test ROS2 functionality on the RISC-V architecture with laser radar to implement mapping and navigation functions on ROS2.
From the laboratory to the industry, from campus enthusiasts to professional developers, China is driving the development of RISC-V technology with diverse innovative forces. As a new force in RISC-V, Gu Jiaqi also adheres to the concept of open-source collaboration, open-sourcing MiracRV on the GitHub platform, and will upload the complete design materials such as design drawings and firmware source code for RISC-V developers to exchange with each other. You are welcome to visit the repository for continuous updates:
https://github.com/discodyer/MiracRV

(Little Easter Egg) PLCT lab testing supervisor Luo Yunxiang is introducing MiracRV
About the Chengfeng Team: Led by engineer Wang Xiaoyun from the Institute of Software, Chinese Academy of Sciences, the ROS-RV Chengfeng Team focuses on the research and promotion of the open-source robot operating system ROS, dedicated to promoting the adaptation and optimization of ROS open-source packages on operating systems such as openEuler, OpenAtom openKylin, and RISC-V architecture, expanding the application of ROS on operating systems and chips.
About the Chaochen Project: In a decade, complete the adaptation and optimization of RISC-V in all fundamental key industry fields and form a top talent network of over ten thousand people.
About the author: Nie Yuting, Institute of Software, Chinese Academy of Sciences PLCT lab testing and content operation, ensuring experience through testing and empowering products through content.