In response to the technical characteristics of intelligent vessels, the Key Laboratory of Marine Intelligent Equipment and Systems at Shanghai Jiao Tong University has proposed testing and verification methods for intelligent vessels: constructing model-in-the-loop testing, software-in-the-loop testing, hardware-in-the-loop testing, and real-ship verification stages. This is achieved by gradually completing the testing and verification work of the vessel through one-to-one replacement between real and simulated components.
Table: Testing and Verification Methods for Intelligent Vessels
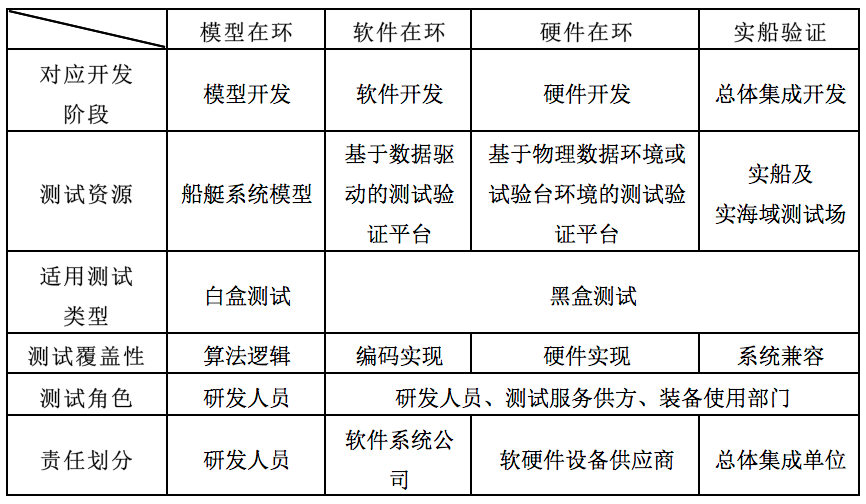
1. Model in the Loop (MIL)
The model-in-the-loop testing mainly serves the exploration and development of new control algorithm strategies, with the main participants typically being R&D personnel from enterprises or researchers from academic institutions. In addition to analytical derivation at the mathematical level, the model-driven development and simulation environment mainly includes MATLAB/Simulink, C/C++, Python, etc., primarily dynamic scripting languages, which facilitate rapid modifications during white-box testing when issues arise. Of course, the premise of MIL testing is to have a controlled object model, such as the Abkowitz equations or MMG equations that describe the maneuvering motion of the vessel.
2. Software in the Loop (SIL)
The software developers of the intelligent vessel system will convert the strategy algorithm/software that has undergone model-in-the-loop testing into compiled languages such as C/C++, obtaining software in the form of a link library or executable file, with command line or graphical user interface, supplemented with appropriate software configuration parameters to conduct software-in-the-loop testing. SIL testing adopts black-box testing, primarily verifying the consistency between the controller model and its code implementation. By using data-driven verification platforms, potential issues in the controller’s algorithm and code implementation can be identified early by flexibly setting boundary conditions, increasing computational load, enhancing calculation accuracy, and limiting computational resources. Typical test subjects in this stage include collision avoidance algorithm software, multi-sensor fusion processing software, and automatic rudder control software.
3. Hardware in the Loop (HIL)
Hardware-in-the-loop testing, also known as semi-physical testing, involves placing the hardware that needs to be tested directly into the simulation loop of the testing system. This not only compensates for the low accuracy of related hardware simulation modules in pure digital simulations, thus enhancing the confidence of the entire testing system but also significantly reduces the workload of programming. During testing, the verification platform based on the physical data environment or test bench environment is connected to the actual hardware through various information channels to jointly complete the testing and simulation work, analyzing the simulation results on a computer to determine the hardware’s operational status. The application of HIL testing makes the simulation conditions closer to actual situations, allowing for a more accurate examination and debugging of the designed hardware system’s performance, which is beneficial for developing new hardware systems and algorithms, reducing the number of field debugging sessions. Typical test subjects in this stage include embedded industrial control computers, optical tracking devices, and graphics cards.
4. Sea Test (ST)
The complex marine environment will significantly affect the performance of intelligent vessels. For example, during China’s first real sea condition intelligent vessel competition, the 2019 “Sea Challenge” China Intelligent Vessel Challenge, participating vessels encountered issues such as false alarms in target detection due to water surface reflections, frequent loss of tracked targets due to wave impacts, and optical recognition failures caused by waves on the deck, leading to mission failures. Therefore, even if the intelligent vessel system has passed model-in-the-loop, software-in-the-loop, and hardware-in-the-loop testing, the real-ship verification stage is indispensable before engineering application. This stage is initiated by the equipment procurement department or the overall integration unit of the unmanned vessel, and a qualified third-party testing service organization constructs task scenarios in real marine testing fields based on the intelligent vessel’s mission requirements to conduct comprehensive system compatibility testing and verification.
Author: Shanghai Jiao Tong University Wang Hongdong, Huang Yi, Yan Zhaokun
END
This is an exclusive article from China Classification Society; please indicate the source “China Classification Society or International Ship Media” when reprinting. Violators will be held accountable!