TinyML is quietly changing the landscape of industrial detection, and today we will introduce a project—tinyml-example-anomaly-detection—that not only demonstrates how to use Python to train two distinctly different machine learning models for detecting motor anomalies but also reveals the entire process from data collection to model deployment. This article will give you a comprehensive understanding of the project’s highlights and practical significance, showcasing the enormous potential of embedded machine learning in industrial detection.
Introduction
In traditional industrial detection systems, monitoring the status of motors and other equipment mainly relies on cumbersome data collection and expert debugging analysis. Now, the tinyml-example-anomaly-detection project utilizes TinyML’s lightweight models to achieve automation and efficiency in motor anomaly detection.
In the project, data is collected through the ESP32 and MSA301 three-axis accelerometer, and two different models—traditional methods based on Mahalanobis distance and an autoencoder network built with TensorFlow and Keras—are used to accurately determine motor load anomalies. Whether for online monitoring or edge computing, it shows excellent real-time performance and accuracy.
Hardware and Data Collection
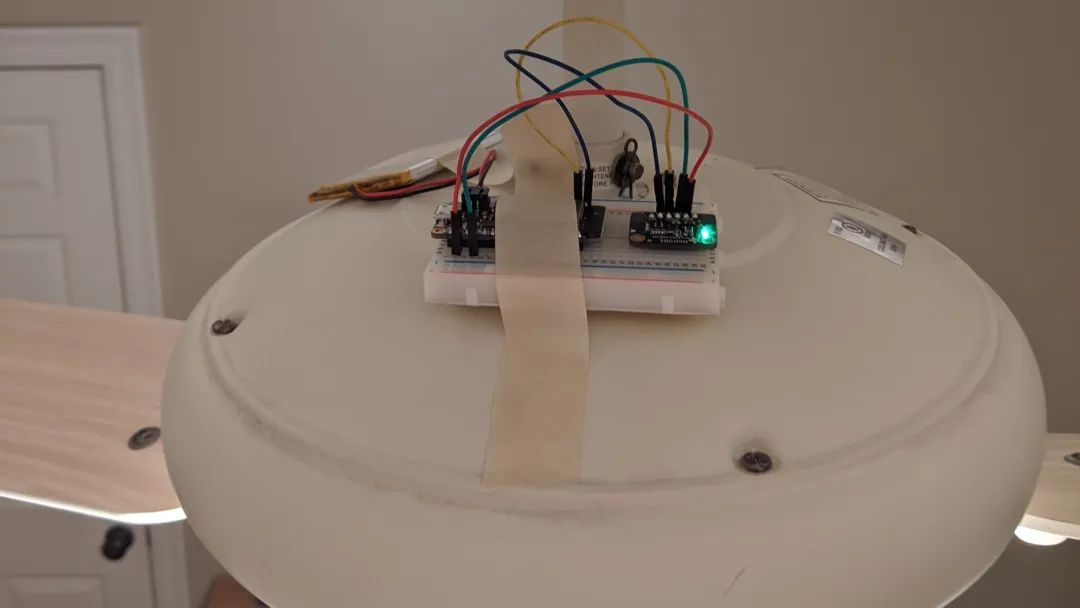
This project uses the Adafruit Feather ESP32 and MSA301 accelerometer, leveraging the wireless data transmission capabilities of the ESP32 to upload collected data to a server. The data collection method is quite straightforward: a sample record containing approximately 200 three-axis data points captures motion information within 1 second and is collected under various working conditions.
In particular, by attaching coins to the fan blades to create abnormal conditions, the model can distinguish between normal and abnormal situations. Additionally, the project provides detailed coding guidance, from configuring WiFi parameters on the Arduino board to data reception on the server side, making the entire process easy to follow and lowering the entry barrier for beginners.
Feature Extraction and Model Training
The project cleverly employs two major models to detect anomalies. The first method, based on Mahalanobis distance, calculates the median absolute deviation (MAD) of the data in normal conditions and the corresponding covariance matrix to derive the statistical model relied upon for anomaly detection; this classic method has high explanatory power in engineering.
The second model is a neural network based on an autoencoder, which was built and trained using TensorFlow and Keras. Since autoencoders can better learn the intrinsic distribution of data, they can effectively distinguish between normal and abnormal data even under certain noise and non-ideal collection conditions. The article also mentions that through repeated training and parameter adjustments, the model’s sensitivity and accuracy in detecting abnormal states can be improved.
Conclusion
The tinyml-example-anomaly-detection project demonstrates the enormous potential of TinyML in the field of motor anomaly detection through a complete data collection, feature extraction, model training, and deployment scheme. Whether using the classic Mahalanobis distance algorithm or the currently popular autoencoder network, it provides reliable solutions for anomaly detection. The project not only reduces hardware costs but also offers effective early warnings in real-time monitoring, making it worthy of in-depth discussion and practice by professionals in the technology and industrial automation fields.
Project Address:https://github.com/ShawnHymel/tinyml-example-anomaly-detection