0x00 Image Introduction
It has been almost 3 months since the release of version 1.4. The newly released Kinetic image is compatible with all models of Raspberry Pi boards. Raspberry Pi 4B, 3B+, 3B, etc., can run perfectly. The main upgrades of this Kinetic release are as follows:
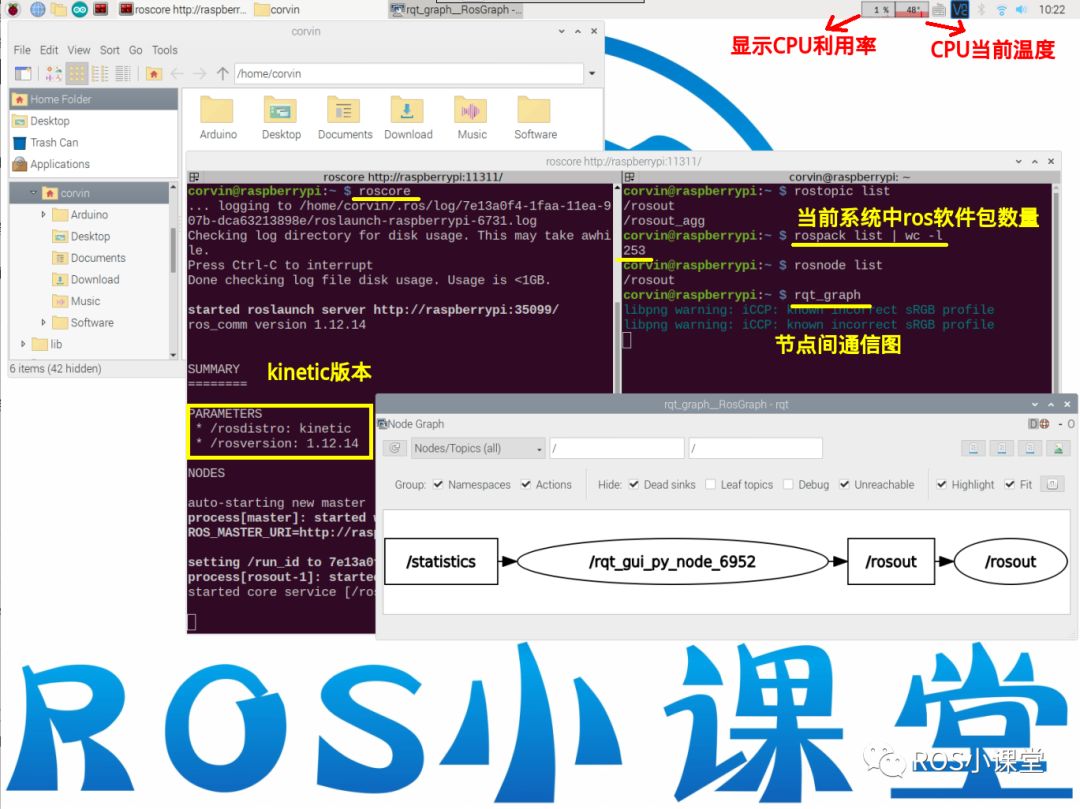
1. Added compilation of 19 software packages, with a total of 253 commonly used ROS software packages compiled in the system, meeting the daily development needs of ROS.
2. All Kinetic software package source codes have been updated to the latest version for compilation, which took nearly 18 hours.
3. The plugins and software of the official Raspberry Pi Raspbian Buster system have been updated to the latest stable version.
4. Some other details have been improved and updated.
Below is the latest desktop screenshot of the Raspberry Pi ROS Kinetic V1.5 version image. For other feature introductions, please refer to the video below:
0x01 Image Download
Due to the time and effort required for compilation and testing, a fee is required to download the Raspberry Pi ROS image to support ongoing maintenance and release. The old version images will also be discounted. Of course, if you are a VIP user of our website, all image downloads are free.
You can download it from the official ROS classroom website:
https://www.corvin.cn/2139.html
It is important to check the image’s md5sum after downloading to prevent errors during the download of large files. If the checksum is correct, it means the downloaded image is complete and can be used normally. If the md5sum is incorrect, you will need to download the image again. The correct md5sum is as follows:
0x02 Boot Test
After the image system is written to the microSD card and inserted into the Raspberry Pi, we can experience the latest version of the Kinetic system. Below is the Kinetic system test video I recorded:
From the above video, we can see that our Raspberry Pi ROS system can support both voice interaction and IMU data acquisition, allowing us to develop various fun features using posture data and voice boards.
In addition, this version of the image has also newly compiled the rosserial_arduino software package, enabling us to develop ROS code on Arduino. This allows Arduino to run as a ROS node, facilitating our main control system to acquire various data from the lower machine Arduino, as shown in the video below:
0x03 Notes
0x04 Reference Materials
0x05 Feedback
If you find any issues in the tutorial, please leave a message at the end of the article or follow the official WeChat account of ROS classroom to send me a message for feedback. I basically handle the messages in the public account every day! Of course, if you would like to give a tip to the ROS classroom, I would be very grateful. A tip of 30 yuan will also invite you to join the ROS classroom WeChat group to learn and communicate with more like-minded partners!