✅ Author Profile: A research enthusiast and Matlab simulation developer, skilled in data processing, modeling and simulation, program design, obtaining complete code, reproducing papers, and scientific simulation.
🍎 Previous Reviews: Follow my personal homepage:Matlab Research Studio
🍊 Personal Motto: Investigate to gain knowledge, complete Matlab code and simulation consultation available via private message.
🔥 Content Introduction
In fields such as robotics and autonomous driving, path planning and control are key components for achieving automation tasks. Traditional linear control methods perform well in handling simple, linearized systems, but many systems in practical applications exhibit nonlinear characteristics, such as the dynamics model of robots and motion constraints in complex environments. Therefore, researching nonlinear control methods for path planning can more accurately address complex scenarios, enhancing system performance and adaptability, which holds significant theoretical significance and practical application value.
II. Basics of Nonlinear Systems and Path Planning
III. Nonlinear Control Strategies for Path Planning
3.2 Model Predictive Control (MPC)
Model Predictive Control is a control strategy based on rolling horizon optimization. In nonlinear control for path planning, MPC first predicts the system’s state trajectory over a future time period based on the nonlinear system model. Then, at each sampling moment, it solves an optimization problem within the prediction horizon to minimize path tracking error and control cost, obtaining the optimal control sequence, and applies the first element of the control sequence to the system. As time progresses, this process is repeated. MPC can effectively handle the nonlinearity and constraints of the system and is widely used in scenarios such as autonomous driving and robotic motion control.
3.3 Adaptive Control
Adaptive control addresses situations where system parameters are unknown or time-varying by online estimating system parameters and adjusting control strategies based on these estimates to maintain good system performance. In nonlinear control for path planning, when the dynamic parameters of the moving entity change or environmental disturbances lead to model inaccuracies, adaptive control can adjust control parameters in real-time to ensure path tracking accuracy. For example, adaptive control methods based on neural networks utilize the powerful nonlinear mapping capabilities of neural networks to learn the nonlinear characteristics and parameter variations of the system, achieving precise path tracking.
IV. Application Case Analysis
4.1 Mobile Robot Path Tracking
In the nonlinear control of mobile robot path planning, the kinematic and dynamic models of the robot are nonlinear. By employing a model predictive control strategy, a nonlinear motion model of the robot is established, considering constraints such as the robot’s speed and steering angle. In simulations or real experiments, the robot can accurately track the planned path in complex environments while effectively avoiding obstacles. By setting different environmental scenarios and path planning objectives, the effectiveness and robustness of the nonlinear control strategy in mobile robot path tracking have been validated.
4.2 Autonomous Vehicle Path Control
During operation, autonomous vehicles are influenced by various nonlinear factors such as road conditions, air resistance, and vehicle dynamics. By utilizing feedback linearization control combined with model predictive control, the vehicle’s nonlinear dynamics model is linearized, and rolling optimization is performed at each sampling moment to achieve precise tracking of the planned path. Additionally, adaptive control methods are employed to handle changes in vehicle parameters and environmental disturbances, ensuring safety and stability under different road conditions and driving scenarios.
V. Challenges and Outlook
Despite the research achievements in nonlinear control for path planning, there are still many challenges. On one hand, modeling and analyzing nonlinear systems is complex, and establishing accurate models requires substantial computational resources and experimental data; on the other hand, the computational complexity of nonlinear control algorithms is high, making real-time performance difficult to guarantee. Future research can explore the following aspects: developing more efficient modeling methods for nonlinear systems, integrating artificial intelligence technologies (such as deep learning) to improve model accuracy and adaptability; optimizing nonlinear control algorithms to reduce computational complexity and enhance real-time performance; and strengthening interdisciplinary integration to apply nonlinear control for path planning in more emerging fields, such as drone swarm control and intelligent logistics.
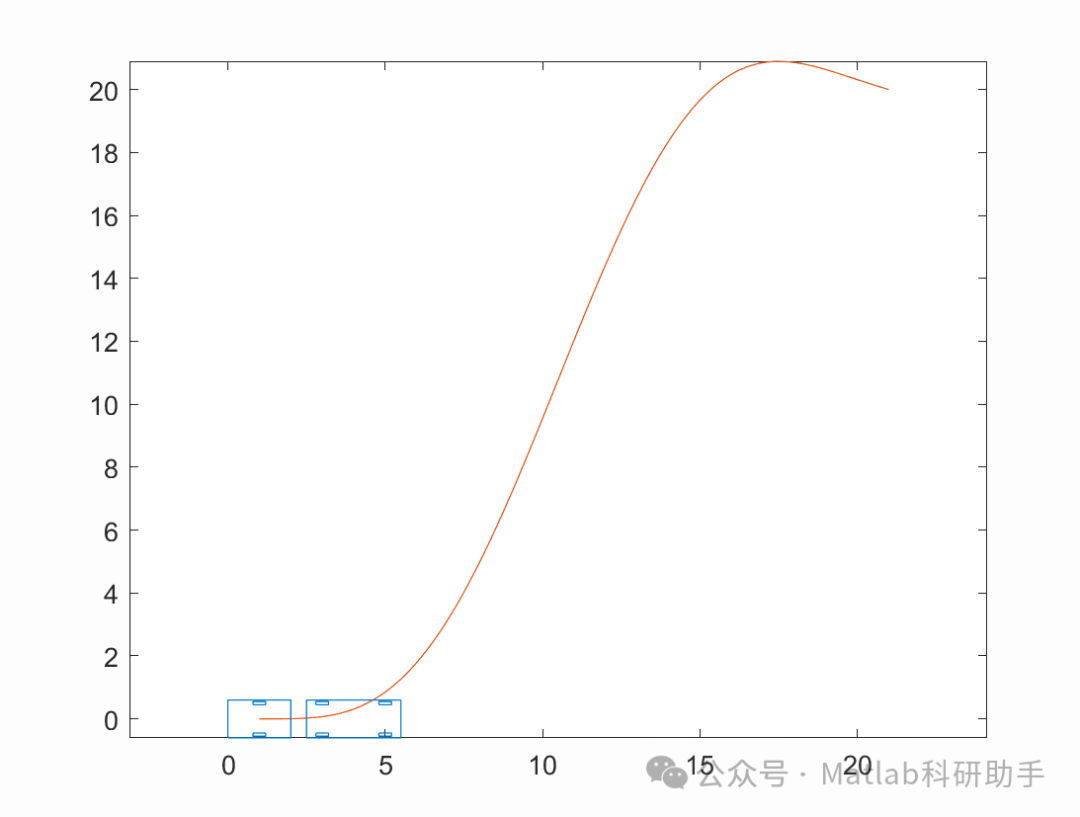
⛳️ Operation Results
🔗 References
[1] Qi Dongliu. Research on AGV Path Planning Based on Intelligent Control [D]. Hefei University of Technology, 2006. DOI:10.7666/d.y870105.
[2] Ren Weijian, Wang Fei, Lü Wei. Path Planning of Mobile Robots Based on Hierarchical Fuzzy Control [J]. Science and Technology and Engineering, 2010(10):5. DOI:CNKI:SUN:KXJS.0.2010-10-009.
[3] Nan Jingfu, Liu Yanbin, Niu Guanglin. Path Planning and Tracking Control of Wheeled Mobile Robots [J]. Mechanical Design and Manufacturing, 2007(8):3. DOI:10.3969/j.issn.1001-3997.2007.08.055.
📣 Partial Code
🎈 Some theoretical references are from online literature; please contact the author for removal if there is any infringement.
👇 Follow me to receive a wealth of Matlab e-books and mathematical modeling materials
🏆 Our team specializes in guiding and customizing various research fields in MATLAB simulation, helping to realize research dreams:
🌈 Various intelligent optimization algorithm improvements and applications
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, three-dimensional packing, logistics site selection, cargo location optimization, bus scheduling optimization, charging station layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual field base station and drone site selection optimization, knapsack problem, wind farm layout, time slot allocation optimization, optimal distributed generation unit allocation, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency life material distribution center site selection, base station site selection, road lamp post arrangement, hub node deployment, transmission line typhoon monitoring devices, container scheduling, unit optimization, investment optimization portfolio, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-layer vehicle path planning (2E-VRP), electric vehicle path planning (EVRP), hybrid vehicle path planning, mixed flow workshop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection path planning problem, port scheduling, port bridge scheduling, parking space allocation, airport flight scheduling, leak source localization
🌈 Machine learning and deep learning time series, regression, classification, clustering, and dimensionality reduction
2.1 BP time series, regression prediction, and classification
2.2 ENS voice neural network time series, regression prediction, and classification
2.3 SVM/CNN-SVM/LSSVM/RVM support vector machine series time series, regression prediction, and classification
2.4 CNN|TCN|GCN convolutional neural network series time series, regression prediction, and classification
2.5 ELM/KELM/RELM/DELM extreme learning machine series time series, regression prediction, and classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU gated neural network time series, regression prediction, and classification
2.7 Elman recurrent neural network time series, regression prediction, and classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM long short-term memory neural network series time series, regression prediction, and classification
2.9 RBF radial basis function neural network time series, regression prediction, and classification
2.10 DBN deep belief network time series, regression prediction, and classification
2.11 FNN fuzzy neural network time series, regression prediction
2.12 RF random forest time series, regression prediction, and classification
2.13 BLS broad learning system time series, regression prediction, and classification
2.14 PNN pulse neural network classification
2.15 Fuzzy wavelet neural network prediction and classification
2.16 Time series, regression prediction, and classification
2.17 Time series, regression prediction, and classification
2.18 XGBOOST ensemble learning time series, regression prediction, and classification
2.19 Transform various combinations time series, regression prediction, and classification
Directions cover wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load prediction, stock price prediction, PM2.5 concentration prediction, battery health status prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal identification, precise prediction of subway stops, transformer fault diagnosis
🌈 Image Processing Aspects
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compressed sensing
🌈 Path Planning Aspects
Traveling Salesman Problem (TSP), Vehicle Routing Problem (VRP, MVRP, CVRP, VRPTW, etc.), 3D path planning for drones, drone collaboration, drone formation, robot path planning, grid map path planning, multimodal transport problems, electric vehicle path planning (EVRP), two-layer vehicle path planning (2E-VRP), hybrid vehicle path planning, ship trajectory planning, full path planning, warehouse patrol
🌈 Drone Application Aspects
Drone path planning, drone control, drone formation, drone collaboration, drone task allocation, online optimization of drone safe communication trajectories, vehicle collaborative drone path planning
🌈 Communication Aspects
Sensor deployment optimization, communication protocol optimization, routing optimization, target localization optimization, Dv-Hop localization optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI localization optimization, underwater communication, communication upload and download allocation
🌈 Signal Processing Aspects
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, electromyography signals, electroencephalography signals, signal timing optimization, electrocardiogram signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection
🌈 Power System Aspects
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity
🌈 Cellular Automata Aspects
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion
🌈 Radar Aspects
Kalman filter tracking, trajectory association, trajectory fusion, SOC estimation, array optimization, NLOS identification
🌈 Workshop Scheduling
Zero-wait flow shop scheduling problem (NWFSP), permutation flow shop scheduling problem (PFSP), hybrid flow shop scheduling problem (HFSP), zero idle flow shop scheduling problem (NIFSP), distributed permutation flow shop scheduling problem (DPFSP), blocking flow shop scheduling problem (BFSP)
👇