✅ Author Introduction: A Matlab simulation developer passionate about scientific research, skilled in data processing, modeling simulation, program design, obtaining complete code, reproducing papers, and scientific simulation.
🍎 Previous Review: Follow the personal homepage:Matlab Research Studio
🍊 Personal Motto: Investigate to gain knowledge, complete Matlab code and simulation consultation available via private message.
🔥 Content Introduction
This article proposes a robot trajectory planning method based on the Penguin Optimization Algorithm (POA). It first explains the basic principles of the Penguin Optimization Algorithm and analyzes its advantages in global search and local development. For the objectives of shortest path and obstacle avoidance in robot trajectory planning, a corresponding mathematical model is constructed. The feasible trajectories of the robot are encoded as individuals in the Penguin Optimization Algorithm, and by simulating the foraging and migration behaviors of penguins in their natural environment, the optimal trajectory is searched in the solution space. Simulation results show that compared to traditional Particle Swarm Optimization and Genetic Algorithms, the robot trajectory planning method based on the Penguin Optimization Algorithm exhibits superior performance in terms of path length and obstacle avoidance success rate, effectively solving the robot trajectory planning problem and providing technical support for efficient robot operation.
Keywords
Penguin Optimization Algorithm; Robot Trajectory Planning; Shortest Path; Obstacle Avoidance; Intelligent Optimization Algorithm
1. Introduction
Robots are increasingly applied in various scenarios such as industrial production, logistics transportation, and service fields, and trajectory planning is one of the key technologies for robots to achieve efficient and safe operation. Robot trajectory planning aims to plan an optimal path from the starting point to the target point while satisfying constraints such as obstacle avoidance, minimum time, and minimum energy consumption.
Traditional trajectory planning methods, such as the artificial potential field method and A* algorithm, can achieve good results in simple environments, but they face issues such as high computational load and susceptibility to local optima in complex environments. With the development of intelligent optimization algorithms, Particle Swarm Optimization and Genetic Algorithms have been widely used in robot trajectory planning, but there is still room for improvement in search efficiency and accuracy. The Penguin Optimization Algorithm is a novel intelligent optimization algorithm inspired by the collective behavior of penguins, possessing strong global search and local development capabilities, and its application in robot trajectory planning is expected to improve the quality and efficiency of planning.
2. Principles of the Penguin Optimization Algorithm
The Penguin Optimization Algorithm simulates the foraging, migration, and social behaviors of penguins in their natural environment. In the algorithm, each solution in the search space is viewed as a penguin, and the position of the penguin corresponds to the parameters of the solution. The algorithm mainly includes the following steps:
- Initialize the population: Randomly generate a certain number of penguin individuals in the solution space to form the initial population. Each penguin individual’s position represents a potential solution, i.e., a possible trajectory of the robot.
- Calculate fitness: Define a fitness function based on the objectives of robot trajectory planning (such as path length, obstacle avoidance, etc.) and calculate the fitness value of each penguin individual. A higher fitness value indicates a better corresponding trajectory.
- Foraging behavior: Simulate the behavior of penguins randomly searching for food within a certain range by randomly perturbing the current individual position to generate a new individual position. If the fitness of the new position is better than the original position, update the individual position.
- Migration behavior: Penguins migrate based on environmental changes and group information. In the algorithm, a certain probability is used to select some penguin individuals to move closer to the current global optimal individual, simulating the migration behavior of penguins and accelerating the convergence speed of the algorithm.
- Social behavior: Penguins communicate information with each other, which in the algorithm manifests as individuals learning from each other. By exchanging partial information between individuals, new individuals are generated, enhancing the global search capability of the algorithm.
- Update the population: Repeat the above foraging, migration, and social behaviors to continuously update the positions and fitness values of the penguin population until the termination condition is met (such as reaching the maximum number of iterations or convergence of fitness values).
3. Modeling the Robot Trajectory Planning Problem
(1) Environment Modeling
Model the robot’s working environment as a two-dimensional or three-dimensional space, using methods such as grid method or Voronoi diagram method to discretize the environment. For example, using the grid method, the working environment is divided into equally sized grids, each representing a position unit. Different attribute values are assigned based on whether there are obstacles within the grid, such as 0 indicating no obstacle and 1 indicating an obstacle.
(2) Objective Function
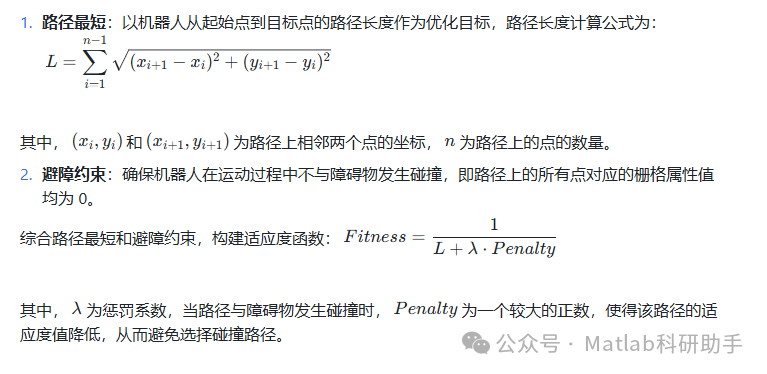
(3) Encoding of Solutions
Encode the robot’s trajectory as individuals in the Penguin Optimization Algorithm. Integer encoding can be used, where the sequence of grid numbers passed through on the path is arranged to form a coding string, which corresponds to the position of a penguin individual. For example, in a 10×10 grid environment, if the robot’s path passes through grids (2, 3), (3, 4), and (4, 5) in order, its encoding would be [23, 34, 45].
4. Robot Trajectory Planning Process Based on the Penguin Optimization Algorithm
- Initialization: Set algorithm parameters such as the number of penguin populations, maximum number of iterations, foraging range, and migration probability, randomly generate the initial population, and encode each individual according to the coding rules.
- Calculate fitness: Calculate the fitness value of each penguin individual based on the fitness function.
- Execute algorithm operations: Sequentially perform foraging behavior, migration behavior, and social behavior operations to update the positions and fitness values of the penguin individuals.
- Check termination conditions: Check if the maximum number of iterations has been reached or if the fitness values have converged. If the termination conditions are met, stop the algorithm; otherwise, return to step 2 to continue execution.
- Output results: The trajectory corresponding to the individual with the optimal fitness value in the final population is taken as the robot’s optimal planned trajectory.
5. Conclusion
This article applies the Penguin Optimization Algorithm to robot trajectory planning, achieving efficient trajectory planning for robots in complex environments by constructing appropriate mathematical models and algorithm processes. Simulation results indicate that this method outperforms traditional Particle Swarm Optimization and Genetic Algorithms in terms of path length, obstacle avoidance success rate, and convergence speed. Future work may further optimize the parameter settings of the Penguin Optimization Algorithm and apply it to robot trajectory planning in three-dimensional spaces or dynamic environments, expanding the algorithm’s application scope.
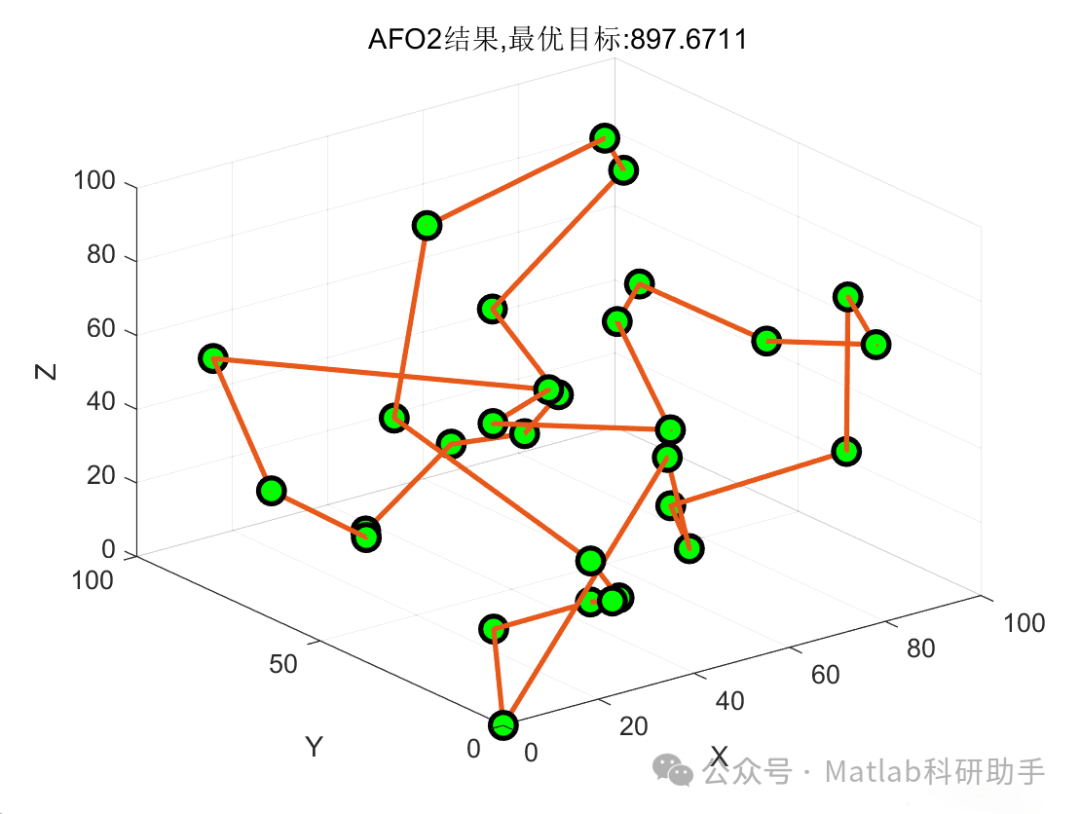
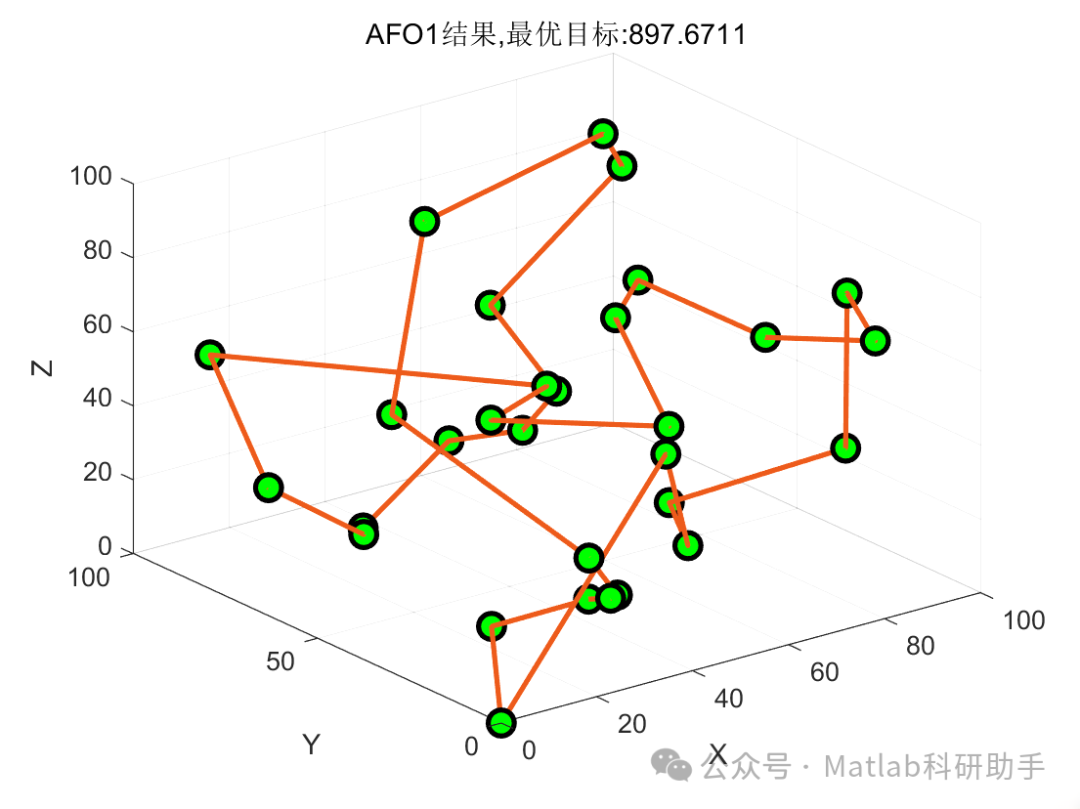
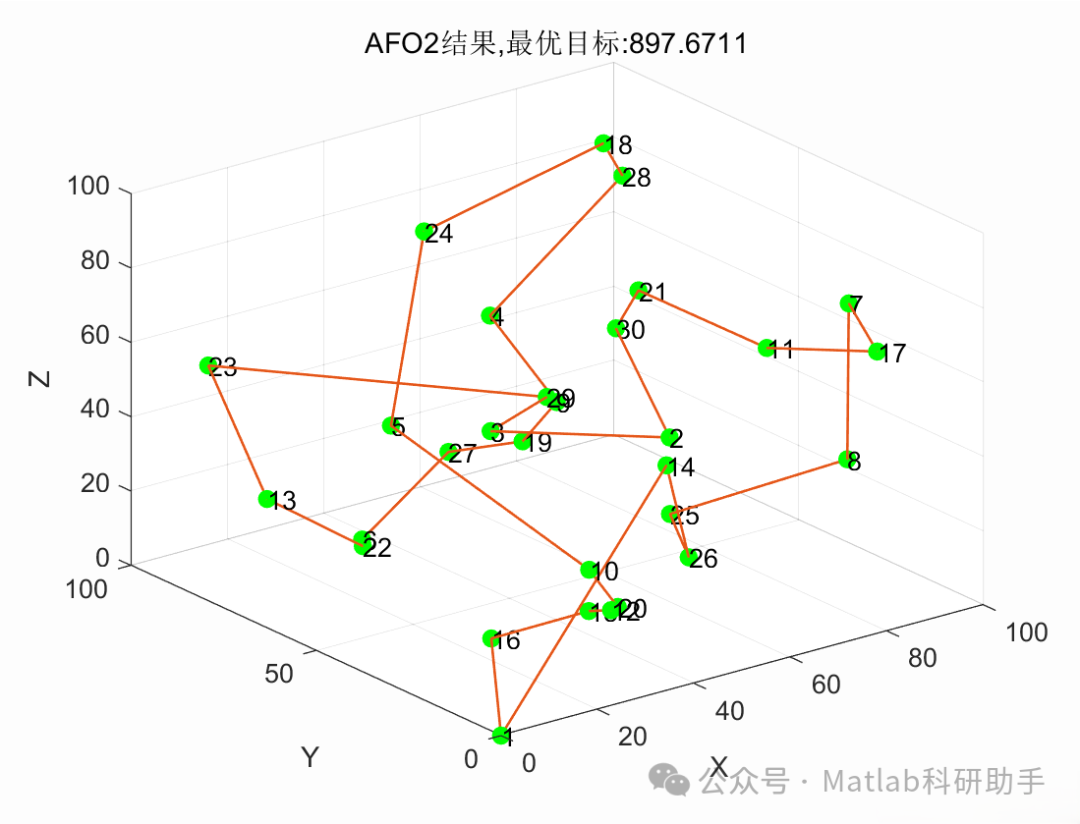
⛳️ Operation Results

🔗 References
[1] Guo Qingda, Wan Chuanheng, Shi Buhai. Research on Time-Optimal Trajectory Planning and Simulation of Industrial Robots Based on Genetic Algorithm[J]. Computer Measurement and Control, 2014, 22(4):3. DOI:10.3969/j.issn.1671-4598.2014.04.084.
[2] Liu Nengguang, Ren Tianran, Chai Cangxiu, et al. Two-Level Planning of Painting Robot Trajectory Based on Genetic Algorithm[J]. Mechanical Design and Manufacturing, 2008(6):3. DOI:CNKI:SUN:JSYZ.0.2008-06-073.
[3] Zuo Fuyong, Hu Xiaoping, Xie Ke, et al. SCARA Robot Trajectory Planning and Simulation Based on MATLAB Robotics Toolbox[J]. Journal of Hunan University of Science and Technology: Natural Science Edition, 2012, 27(2):4. DOI:10.3969/j.issn.1672-9102.2012.02.009.
📣 Partial Code
🎈 Some theoretical references are from online literature; if there is any infringement, please contact the author for deletion.
👇 Follow me to receive a wealth of Matlab e-books and mathematical modeling materials.
🏆 The team specializes in guiding customized Matlab simulations in various research fields, helping to realize research dreams:
🌈 Various intelligent optimization algorithm improvements and applications
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, three-dimensional packing, logistics site selection, cargo position optimization, bus scheduling optimization, charging pile layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual domain base station and drone site selection optimization, knapsack problem, wind farm layout, time slot allocation optimization, optimal distribution of distributed generation units, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency life material distribution center site selection, base station site selection, road lamp post arrangement, hub node deployment, transmission line typhoon monitoring devices, container scheduling, unit optimization, investment optimization portfolio, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-layer vehicle routing problem (2E-VRP), electric vehicle routing problem (EVRP), oil-electric hybrid vehicle routing problem, hybrid flow shop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection path planning problem, port scheduling, port bridge scheduling, parking space allocation, airport flight scheduling, leak source localization.
🌈 Machine learning and deep learning time series, regression, classification, clustering, and dimensionality reduction
2.1 BP time series, regression prediction, and classification
2.2 ENS voice neural network time series, regression prediction, and classification
2.3 SVM/CNN-SVM/LSSVM/RVM support vector machine series time series, regression prediction, and classification
2.4 CNN|TCN|GCN convolutional neural network series time series, regression prediction, and classification
2.5 ELM/KELM/RELM/DELM extreme learning machine series time series, regression prediction, and classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU gated neural network time series, regression prediction, and classification
2.7 Elman recurrent neural network time series, regression prediction, and classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM long short-term memory neural network series time series, regression prediction, and classification
2.9 RBF radial basis function neural network time series, regression prediction, and classification
2.10 DBN deep belief network time series, regression prediction, and classification
2.11 FNN fuzzy neural network time series, regression prediction
2.12 RF random forest time series, regression prediction, and classification
2.13 BLS broad learning system time series, regression prediction, and classification
2.14 PNN pulse neural network classification
2.15 Fuzzy wavelet neural network prediction and classification
2.16 Time series, regression prediction, and classification
2.17 Time series, regression prediction, and classification
2.18 XGBOOST ensemble learning time series, regression prediction, and classification
2.19 Transform various combinations of time series, regression prediction, and classification
Covering wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load forecasting, stock price prediction, PM2.5 concentration prediction, battery health status prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal identification, precise prediction of subway stops, transformer fault diagnosis.
🌈 Image processing aspects
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compressed sensing.
🌈 Path planning aspects
Traveling salesman problem (TSP), vehicle routing problem (VRP, MVRP, CVRP, VRPTW, etc.), three-dimensional path planning for drones, drone collaboration, drone formation, robot path planning, grid map path planning, multimodal transport problems, electric vehicle routing problem (EVRP), two-layer vehicle routing problem (2E-VRP), oil-electric hybrid vehicle routing problem, ship trajectory planning, full path planning, warehouse patrol.
🌈 Drone application aspects
Drone path planning, drone control, drone formation, drone collaboration, drone task allocation, online optimization of safe communication trajectories for drones, vehicle collaborative drone path planning.
🌈 Communication aspects
Sensor deployment optimization, communication protocol optimization, routing optimization, target localization optimization, Dv-Hop localization optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI localization optimization, underwater communication, communication upload and download allocation.
🌈 Signal processing aspects
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, electromyography signals, electroencephalography signals, signal timing optimization, electrocardiogram signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection.
🌈 Power system aspects
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity.
🌈 Cellular automata aspects
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion.
🌈 Radar aspects
Kalman filter tracking, track association, track fusion, SOC estimation, array optimization, NLOS identification.
🌈 Workshop scheduling
Zero-wait flow shop scheduling problem (NWFSP), permutation flow shop scheduling problem (PFSP), hybrid flow shop scheduling problem (HFSP), zero idle flow shop scheduling problem (NIFSP), distributed permutation flow shop scheduling problem (DPFSP), blocking flow shop scheduling problem (BFSP).
👇