✅ Author Profile: A Matlab simulation developer passionate about research, skilled in data processing, modeling simulation, program design, obtaining complete code, reproducing papers, and scientific simulation.
🍎 Previous reviews, follow the personal homepage:Matlab Research Studio
🍊 Personal motto: Investigate things to gain knowledge, complete Matlab code and simulation consultation content via private message.
🔥 Content Introduction
Path planning, as a core issue in the field of artificial intelligence, has extensive application value in various fields such as robot navigation, logistics distribution, and network routing. Traditional path planning algorithms often face challenges such as low computational efficiency and the tendency to get trapped in local optima when dealing with complex environments and high-dimensional problems. This article delves into the path planning method based on Genetic Algorithm (GA). As a bionic optimization algorithm, the genetic algorithm provides a new approach to solving path planning problems due to its global search capability and robustness. This article elaborates on the basic principles of genetic algorithms, including chromosome encoding, fitness function design, selection, crossover, and mutation, and focuses on how to apply these principles to path planning. Through case analysis, the effectiveness and advantages of genetic algorithms in complex terrains and dynamic obstacle environments are demonstrated. Finally, the future development trends and potential challenges of this method are discussed.
Keywords
Path Planning; Genetic Algorithm; Optimization; Robot Navigation; Global Search
1 Introduction
Path planning aims to find the optimal path from the starting point to the target point, with evaluation criteria typically including path length, time, energy consumption, and safety. With advancements in science and technology, path planning problems have become increasingly complex, such as path planning in environments with multiple obstacles, dynamic conditions, and three-dimensional spaces. Traditional algorithms like Dijkstra’s algorithm and A* algorithm perform excellently in solving shortest path problems in simple static environments, but their computational costs can increase dramatically when faced with large-scale, high-complexity problems, and they are prone to getting stuck in local optima, failing to meet practical application needs.
The genetic algorithm, inspired by the biological evolution process, is a heuristic search algorithm that adaptively searches in the solution space, exhibiting strong global search capabilities and low requirements for problem modeling. This makes genetic algorithms uniquely advantageous in solving NP-hard problems and complex optimization issues. Therefore, applying genetic algorithms to path planning has become one of the current research hotspots.
2 Principles of Genetic Algorithm
The genetic algorithm was proposed by Professor John Holland from the University of Michigan in the 1970s as a global optimization search algorithm that simulates biological natural selection and genetic mechanisms. It searches for optimal solutions in the problem space by simulating the evolutionary process of biological populations. The core ideas of genetic algorithms include the following aspects:
2.1 Chromosome Encoding
In genetic algorithms, solutions to problems are encoded as “chromosomes”. For path planning problems, the encoding method of chromosomes is crucial. Common encoding methods include:
- Binary Encoding: Each node or direction on the path is encoded as a binary string. This method is simple and intuitive but may not be precise enough for continuous space path planning.
- Real Number Encoding: Directly uses the coordinates of path points as chromosome genes. This method is more realistic, but the design of crossover and mutation operations is relatively complex.
- Path Point Sequence Encoding: The sequence of discrete nodes traversed on the path is used as the chromosome. This method is widely used in grid maps or discrete spaces.
For example, in a grid map, the coordinates of each grid or movement directions (up, down, left, right, diagonal) can be encoded to form a path.
2.2 Initial Population Generation
At the start of the algorithm, a certain number of chromosomes are randomly generated to form the initial population. The quality of the initial population has a certain impact on the convergence speed and global search capability of the algorithm. Typically, random generation is used to ensure the diversity of the population.
2.4 Selection Operation
The selection operation (Selection) selects excellent individuals from the current population based on the fitness values of the chromosomes to enter the next generation. Common selection methods include:
- Roulette Selection: The selection probability is allocated proportionally based on fitness values, with individuals having higher fitness being more likely to be selected.
- Tournament Selection: Randomly selects K individuals and then chooses the one with the best fitness from them.
- Rank Selection: The individuals in the population are ranked according to fitness, and selection probabilities are allocated based on their rankings.
The selection operation ensures that excellent genes can be inherited to the next generation, forming the basis for the algorithm’s convergence.
2.5 Crossover Operation
The crossover operation (Crossover) simulates the gene recombination process of biology, exchanging parts of genes from two parent chromosomes to produce new offspring chromosomes. Crossover is the primary means by which genetic algorithms generate new individuals, allowing excellent genes from different chromosomes to combine, thus exploring a larger solution space. For path planning problems, the design of crossover operations must ensure that the new paths generated are still valid. For example, for path point sequence encoding, a crossover point can be randomly selected, and the latter half of the parent path point sequences can be exchanged.
2.6 Mutation Operation
The mutation operation (Mutation) simulates the process of genetic mutation in biology, randomly changing the value of one or more gene values on the chromosome with a certain probability. The mutation operation introduces new genes, increasing the diversity of the population, which helps the algorithm escape local optima and search for global optimal solutions. In path planning, mutation operations can manifest as randomly changing a node in the path or making random adjustments to a small segment of the path.
3 Application of Genetic Algorithm in Path Planning
The specific steps for applying genetic algorithms to path planning problems are as follows:
3.1 Problem Modeling
First, it is necessary to model the path planning environment. Common modeling methods include:
- Grid Map: Divides the environment into a series of equally sized grids, each representing passable or impassable areas.
- Visibility Graph Method: For environments with polygonal obstacles, connects the vertices of the obstacles with the start and end points to form a visibility graph.
- Waypoint Graph Method: Predefines a series of passable intermediate waypoints, with paths formed by connecting these waypoints.
This article uses a grid map as an example, abstracting the environment into a two-dimensional grid.
3.3 Fitness Function Design
For path planning problems, the fitness function typically needs to consider the following aspects:
- Path Length: The shorter the path, the higher the fitness.
- Obstacle Avoidance: Paths that cross obstacles will be penalized, leading to a decrease in fitness.
- Smoothness: The fewer turns or smaller angles in the path, the smoother the path, resulting in higher fitness.
3.4 Genetic Operations
- Selection: Uses roulette selection or tournament selection to select individuals with high fitness.
- Crossover: Uses single-point or multi-point crossover. For example, for path point sequence encoding, a crossover point is randomly selected, and the parts of the two parent paths after that point are exchanged. It is important to note that crossover may produce infeasible paths (such as crossing obstacles or being broken), so repairs need to be made or high penalties should be applied in the fitness function.
- Mutation: Randomly selects a node in the path and replaces it with a legal node nearby, or randomly changes the direction of a segment of the path. The mutation probability is usually low to maintain the convergence of the genetic algorithm.
3.5 Algorithm Process
- Initialization: Randomly generate N initial paths (chromosomes) to form the initial population.
- Evaluation: Calculate the fitness value of each chromosome in the population.
- Selection: Select excellent individuals from the current population based on fitness values through the selection operation.
- Crossover: Perform crossover operations on the selected individuals to generate new offspring.
- Mutation: Perform mutation operations on the offspring individuals.
- Update Population: Merge the newly generated offspring with the parent individuals to form a new population (or directly replace them).
- Termination Check: Determine whether the preset maximum number of iterations has been reached, or whether the fitness value of the optimal solution in the population has converged to a certain extent. If the termination conditions are met, output the optimal path; otherwise, return to step 2.
4 Future Development and Outlook
Despite significant progress in path planning based on genetic algorithms, there are still many challenges and directions for development:
- Multi-objective Optimization: Actual path planning often involves multiple objectives, such as the shortest path, least energy consumption, and safest path. Combining multi-objective optimization algorithms (such as NSGA-II) with genetic algorithms is an important research direction for the future.
- Dynamic Environment Adaptation: In dynamic environments, the positions of obstacles may change. How to enable genetic algorithms to adapt to environmental changes in real-time and quickly replan paths is an urgent problem to be solved.
- Integration with Other Algorithms: Combining other intelligent optimization algorithms (such as particle swarm optimization, ant colony algorithm) or traditional algorithms (such as A* algorithm) to form hybrid algorithms that balance global search capability and local optimization efficiency.
- Three-dimensional Space Path Planning: Applying genetic algorithms to path planning for drones, underwater robots, etc., in three-dimensional spaces will face greater computational challenges and more complex modeling issues.
- Real-time Performance and Hardware Acceleration: For applications with high real-time requirements, researching how to improve the computational efficiency of genetic algorithms through hardware acceleration (such as GPU parallel computing) is essential.
- Adaptive Parameter Adjustment: Introducing adaptive mechanisms to allow the parameters of genetic algorithms to be dynamically adjusted based on the conditions during the search process, thereby improving the robustness and convergence speed of the algorithm.
5 Conclusion
This article provides a detailed introduction to the path planning method based on genetic algorithms, starting from the basic principles of genetic algorithms and exploring the application details in path planning, including chromosome encoding, fitness function design, and genetic operations. Through case analysis, the effectiveness and advantages of genetic algorithms in complex environments are verified. Although genetic algorithms show great potential in path planning, they still face challenges such as computational efficiency and parameter sensitivity. Future research will focus on addressing these issues and further enhancing the application value of genetic algorithms in the field of path planning by integrating with other advanced technologies, providing strong technical support for the development of intelligent robotics, autonomous driving, and smart logistics.
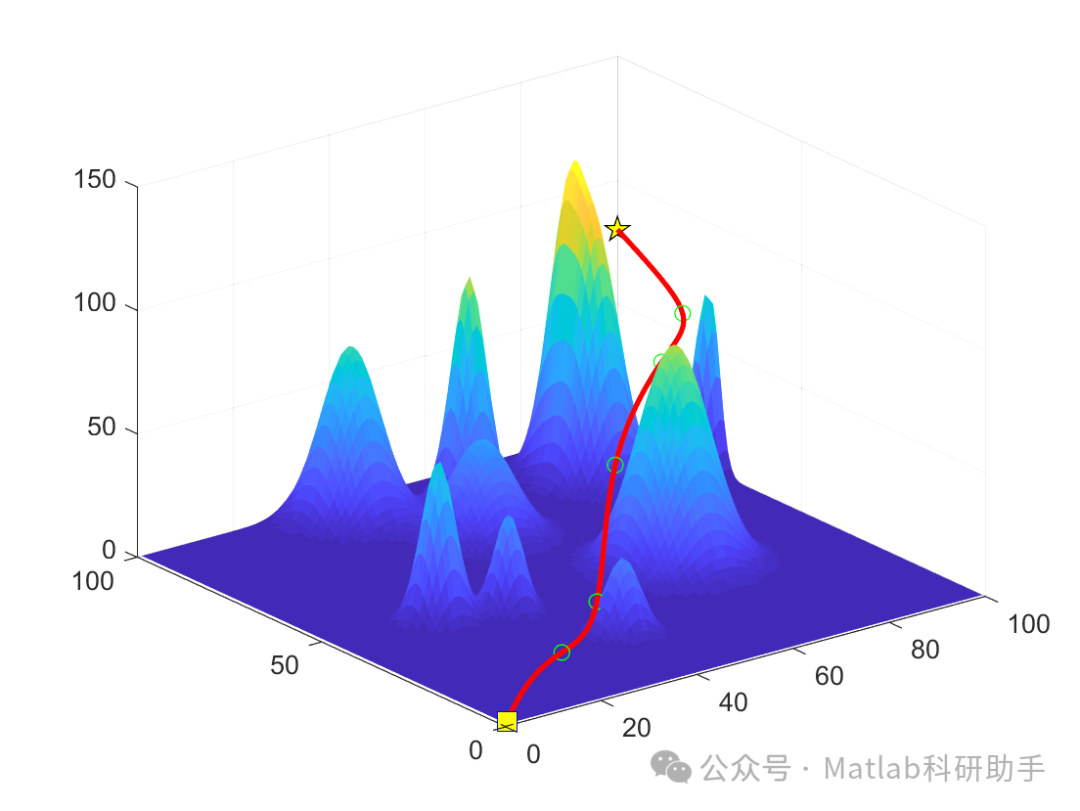
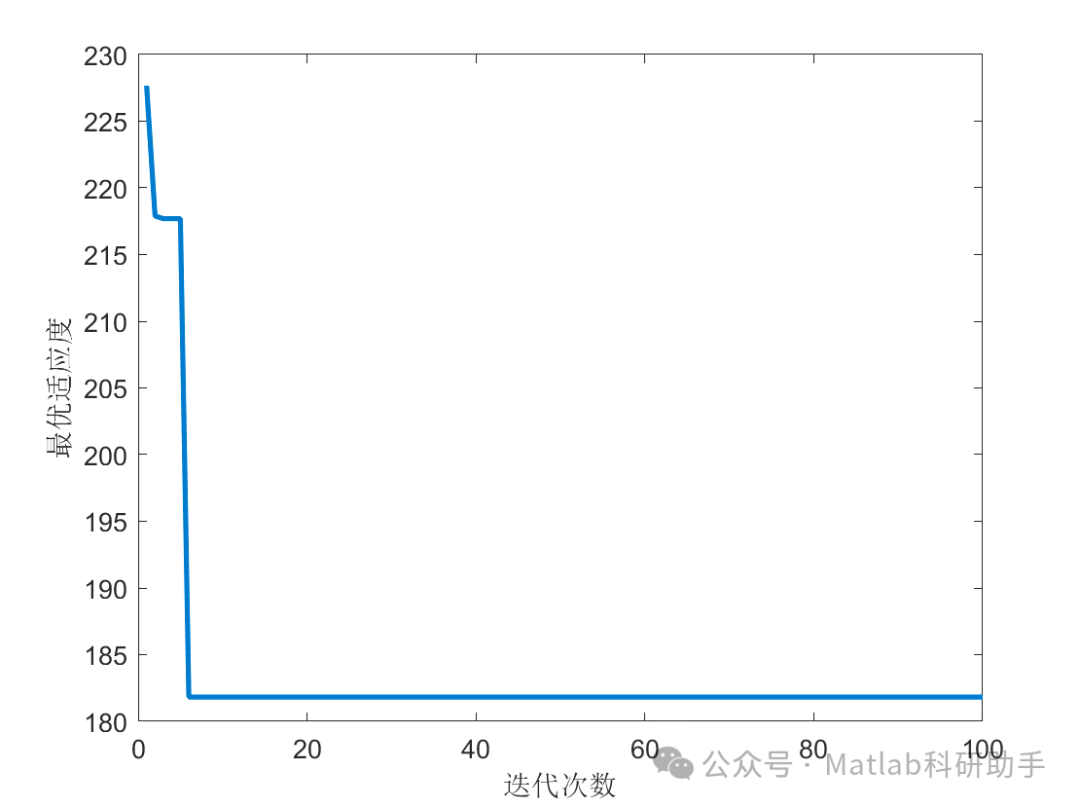
⛳️ Operation Results
🔗 References
[1] Yin Ming, Zhang Xinghua, Dai Xianzhong. Implementation of Genetic Algorithm Based on MATLAB [J]. Electronic Technology Application, 2000, 026(001):9-11. DOI:10.3969/j.issn.0258-7998.2000.01.003.
[2] Shi Tiefeng. Application of Improved Genetic Algorithm in Mobile Robot Path Planning [J]. Computer Simulation, 2011, 28(4):4. DOI:10.3969/j.issn.1006-9348.2011.04.048.
[3] Cui Jianjun. Research on Path Planning of Mobile Robots Based on Genetic Algorithm [D]. Xi’an University of Science and Technology, 2010. DOI:10.7666/d.d095408.
📣 Partial Code
🎈 Some theoretical references are from online literature; please contact the author for removal if there is any infringement.
👇 Follow me to receive a wealth of Matlab e-books and mathematical modeling materials
🏆 The team specializes in guiding customized Matlab simulations in various research fields, supporting research dreams:
🌈 Various intelligent optimization algorithm improvements and applications
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, three-dimensional packing, logistics site selection, cargo location optimization, bus scheduling optimization, charging pile layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual domain base station and drone site selection optimization, knapsack problem, wind farm layout, time slot allocation optimization, optimal distributed generation unit allocation, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency life material distribution center site selection, base station site selection, road lamp post arrangement, hub node deployment, transmission line typhoon monitoring devices, container scheduling, unit optimization, investment optimization portfolio, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-layer vehicle path planning (2E-VRP), electric vehicle path planning (EVRP), oil-electric hybrid vehicle path planning, mixed flow shop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection path planning problem, port scheduling, port bridge scheduling, parking space allocation, airport flight scheduling, leak source localization
🌈 Machine learning and deep learning time series, regression, classification, clustering, and dimensionality reduction
2.1 BP time series, regression prediction, and classification
2.2 ENS voice neural network time series, regression prediction, and classification
2.3 SVM/CNN-SVM/LSSVM/RVM support vector machine series time series, regression prediction, and classification
2.4 CNN|TCN|GCN convolutional neural network series time series, regression prediction, and classification
2.5 ELM/KELM/RELM/DELM extreme learning machine series time series, regression prediction, and classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU gated neural network time series, regression prediction, and classification
2.7 Elman recurrent neural network time series, regression prediction, and classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM long short-term memory neural network series time series, regression prediction, and classification
2.9 RBF radial basis function neural network time series, regression prediction, and classification
2.10 DBN deep belief network time series, regression prediction, and classification
2.11 FNN fuzzy neural network time series, regression prediction
2.12 RF random forest time series, regression prediction, and classification
2.13 BLS broad learning system time series, regression prediction, and classification
2.14 PNN pulse neural network classification
2.15 Fuzzy wavelet neural network prediction and classification
2.16 Time series, regression prediction, and classification
2.17 Time series, regression prediction, and classification
2.18 XGBOOST ensemble learning time series, regression prediction, and classification
2.19 Transform various combinations of time series, regression prediction, and classification
Covering wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load forecasting, stock price prediction, PM2.5 concentration prediction, battery health status prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal identification, subway parking precision prediction, transformer fault diagnosis
🌈 Image processing aspects
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compressed sensing
🌈 Path planning aspects
Traveling salesman problem (TSP), vehicle routing problem (VRP, MVRP, CVRP, VRPTW, etc.), three-dimensional path planning for drones, drone collaboration, drone formation, robot path planning, grid map path planning, multimodal transport problems, electric vehicle path planning (EVRP), two-layer vehicle path planning (2E-VRP), oil-electric hybrid vehicle path planning, ship trajectory planning, full path planning, warehouse patrol
🌈 Drone application aspects
Drone path planning, drone control, drone formation, drone collaboration, drone task allocation, online optimization of drone safe communication trajectories, vehicle collaborative drone path planning
🌈 Communication aspects
Sensor deployment optimization, communication protocol optimization, routing optimization, target localization optimization, Dv-Hop localization optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI localization optimization, underwater communication, communication upload and download allocation
🌈 Signal processing aspects
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, electromyography signals, electroencephalography signals, signal timing optimization, electrocardiogram signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection
🌈 Power system aspects
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity
🌈 Cellular automata aspects
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion
🌈 Radar aspects
Kalman filter tracking, trajectory association, trajectory fusion, SOC estimation, array optimization, NLOS identification
🌈 Workshop scheduling
Zero-wait flow shop scheduling problem (NWFSP), permutation flow shop scheduling problem (PFSP), hybrid flow shop scheduling problem (HFSP), zero idle flow shop scheduling problem (NIFSP), distributed permutation flow shop scheduling problem (DPFSP), blocking flow shop scheduling problem (BFSP)
👇