Classification of Medical Robots
The International Federation of Robotics (IFR) categorizes medical robots into four main types: surgical robots, rehabilitation robots, assistive robots, and service robots.
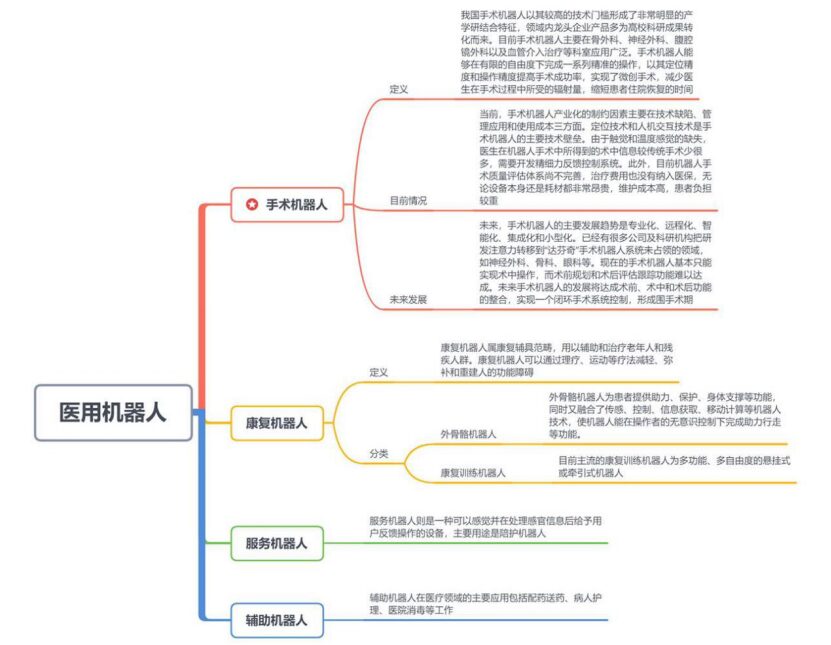
Figure 1: Classification and Introduction of Medical Robots
1. Surgical Robots
Currently, surgical robots are widely used in departments such as orthopedic surgery, neurosurgery, laparoscopic surgery, and vascular interventional therapy. Major products include: surgical robots, radiotherapy robots, orthopedic robots, vascular interventional robots, and endoscopic robots.
2. Rehabilitation Robots
Main products include suspension rehabilitation robots, exoskeleton robots, nursing robots, etc.
3. Assistive Robots
Main products include capsule robots, medication dispensing robots, diagnostic robots, and telemedicine robots.
4. Service Robots
Main products include medical logistics robots, disinfection robots, and patient transfer robots.
Domestic Medical Robot Market Size: Focused on Rehabilitation Robots
Since 2014, China has gradually introduced surgical robots, which are currently mainly used in top-tier hospitals in major cities. In recent years, the market size of service robots in China has been continuously developing, with rapid improvements in the intelligence level of service robots, and the technology related to intelligence is basically on par with internationally leading levels. Surgical robots have transitioned from laboratory research to clinical applications with good results.
From the perspective of application areas, the demand for medical robots in China is gradually increasing and diversifying, with surgical robots, primarily rehabilitation robots, being widely used. Additionally, various types of assistive and service robots, including logistics, medication dispensing, blood sampling, and capsule robots, have emerged based on surgical and rehabilitation robots. Overall, rehabilitation robots account for about 41%, assistive robots for 17%, and surgical robots for 16%.
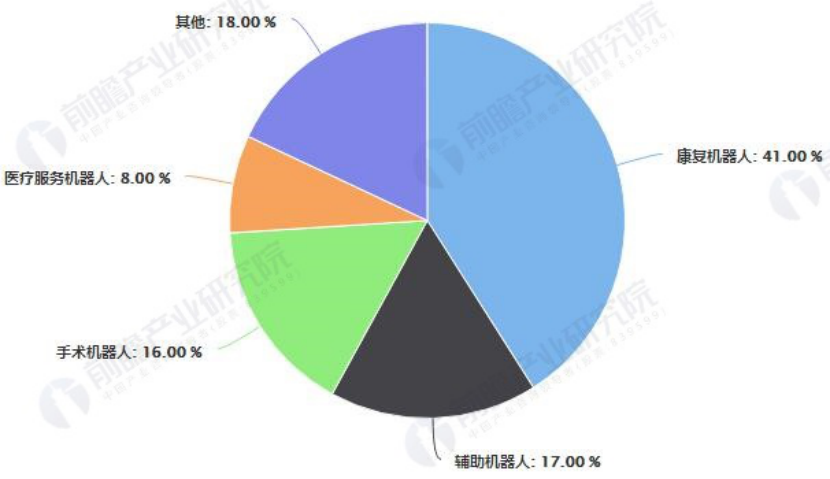
Figure 2: Market Application Proportion of Medical Robots
Source: Qianzhan Research Institute
According to statistics from the International Federation of Robotics (IFR), the market size of intelligent medical robots in China reached 4.32 billion yuan in 2019, and it is expected to exceed 10 billion yuan by 2025. Currently, digitization and intelligence have become important development directions for intelligent medical robots. With the deepening of domestic industry-academia-research cooperation and the pursuit of capital for industry hotspots, the research and development of intelligent medical robot technology is progressing rapidly, and products will extend to more application scenarios.
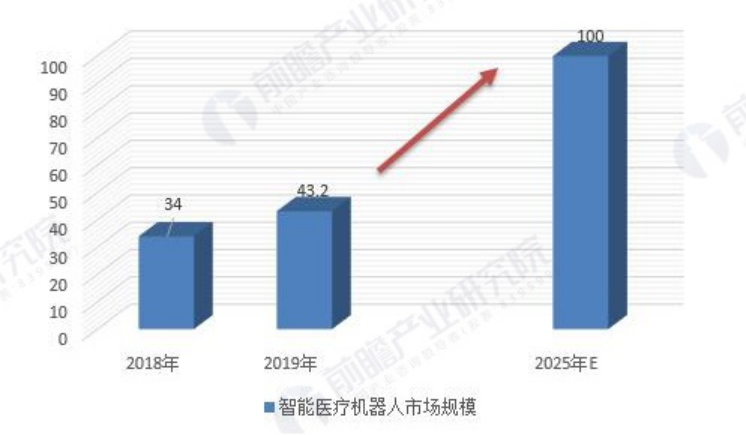
Figure 3: Market Size of China’s Intelligent Medical Robot Industry from 2018 to 2025 (Unit: 100 million yuan)
Source: Qianzhan Research Institute
Surgical Robot Representative Products
The following will focus on introducing representative products of surgical robots in various fields.
Surgical Robots in Neurosurgery
Currently, domestic neurosurgical robots are primarily used for stereotactic surgery, while research on domestic craniotomy robots is still at the preliminary animal testing stage.
Frame-less Brain Stereotactic Instrument CAS-R-2 (Huazhi Minimally Invasive)
The CAS-R-2 frame-less brain stereotactic surgical system, developed as part of the national “863” program by Huazhi Minimally Invasive, Tsinghua University, and the Navy General Hospital, is the first neurosurgical robot in China to have complete independent intellectual property rights.
The CAS-R-2 frame-less brain stereotactic surgical system is mainly used for surgical planning, navigation, and stereotactic assistance in neurosurgery, perfectly integrating the surgical planning system, navigation system, and surgical platform, expanding the application range and improving surgical safety.
The CAS-R-2 surgical robot has passed CFDA registration four times, achieving actual clinical precision within 0.8 mm, making it the most detailed and precise neurosurgical robot in China. This product allows patients to undergo surgery while awake, with a surgical duration of only about half an hour, a surgical incision of only 2 mm, and discharge within 3-5 days post-operation, leaving no scars. Notably, this neurosurgical robot has undergone several rounds of technological research and iterative upgrades, and in 2006, it broke the traditional surgical limitations on patient demographics, expanding the surgical treatment targets to include children.
The CAS-R-2 surgical robot system mainly consists of three parts (see Figure 4):
1. Surgical Navigation Software System: 3D real-time surgical planning with a clear and simple interactive interface to assist doctors in accurately locating lesions.
2. Five-degree-of-freedom robotic arm
3. Open surgical tool platform

Cranibot Intelligent Craniotomy Robot System
The Cranibot Intelligent Craniotomy Robot System is jointly developed by the Neurosurgery Department of the First Medical Center of the PLA General Hospital and the Intelligent Robotics Institute of Beijing Institute of Technology. It has recently completed skull model tests, animal head experiments, and live animal experiments, utilizing force feedback control, CT image navigation, human-computer interaction control algorithms, and real-time display systems to achieve human-computer interaction-controlled craniotomy, improving the efficiency and accuracy of craniotomy compared to manual methods.
“Liyuan” Robot System – Minimally Invasive Neurosurgery
The “Liyuan” Robot System is a new generation of robot-assisted surgical system for stereotactic neurosurgery, developed with support from the national 863 program by Beijing University of Aeronautics and Astronautics, the Navy General Hospital, and Tsinghua University. The system consists of the BH600 medical robot, surgical planning simulation system, and binocular vision positioning system. It uses CT/MRI medical imaging as input, guiding the BH600 robot to the surgical target position planned by the doctor through the binocular vision positioning system, providing precise guidance and positioning for the doctor during surgery. It is mainly suitable for the diagnosis and treatment of brain and body lesions, especially in cases where conventional surgical methods are difficult to solve. Successful applications include biopsies of deep brain and body lesions; stereotactic surgical treatment of functional brain diseases such as epilepsy and mental disorders; drainage of deep hematomas and abscesses in the brain and body; removal of foreign bodies from the brain and body; intra-tumoral drug injection and brachytherapy; and transplantation of nerve cells.
“Remebot” Robot (Beijing Baihui Weikang Technology Co., Ltd.)
The “Remebot” robot serves as a “GPS” system for neurosurgery, helping doctors locate subtle lesions in the brain without craniotomy, achieving minimally invasive, precise, and efficient frame-less stereotactic surgery. The entire system achieves a positioning accuracy of 1 mm, with an incision of only 2 mm, and an average surgical duration of just 30 minutes, allowing for discharge after 2-3 days of observation.
Remebot mainly consists of three parts (see Figure 5), which are:
1. Surgical Planning System: Responsible for providing three-dimensional visualization and multi-modal image fusion technology to assist doctors in observing lesions and their surrounding tissue and vascular distribution, planning the optimal puncture path.
2. Binocular Camera: Can accurately identify patients and markers, establishing a mapping relationship between the three-dimensional model and the scene, achieving surgical navigation.
3. Robotic Arm: Can automatically locate the planned target and path, achieving positioning accuracy of 1 mm. Meanwhile, doctors can use the multifunctional operation platform of the robotic arm to perform various surgical procedures such as biopsy, suction, implantation, destruction, and radiotherapy.
On April 13, 2018, the “Remebot” neurosurgical robot officially passed CFDA Class III medical device review, becoming the first neurosurgical robot officially approved in China. It is also the second product in the world to be approved in its country of origin, filling a domestic gap, allowing doctors to perform biopsies, suction, destruction, implantation, radiotherapy, and other 12 types of procedures for nearly a hundred diseases such as cerebral hemorrhage, brain cysts, Parkinson’s disease, and epilepsy.

Figure 5: “Remebot” Robot
Source: Remebot official website
【Huake Precision】 Neurosurgical Robot
China’s first innovative surgical robot for neurosurgery, featuring internationally leading contactless visual positioning, intracranial vascular reconstruction, intelligent obstacle avoidance, and force sensing technologies, used for the surgical treatment of epilepsy, Parkinson’s disease, intracranial tumors, and cerebral hemorrhage, helping doctors quickly locate intracranial lesions and functional areas of the brain, guiding doctors in rapid puncture and electrode implantation, while effectively avoiding intracranial blood vessels and important functional areas.
This technology originates from Tsinghua University, and it is a nationally first surgical robot system with independent intellectual property rights suitable for adults and children (see Figure 6), which can help doctors quickly locate epilepsy lesions, tumor boundaries, bleeding sites, brain functional areas, and develop precise surgical plans for epilepsy, Parkinson’s disease, intracranial tumors, and cerebral hemorrhage, while assisting doctors in rapid puncture/drainage suction, directional positioning, and electrode implantation guidance, effectively avoiding intracranial blood vessels and important functional areas.
During the surgery, the contactless positioning system scans and locates the patient, establishing a correspondence between the actual position coordinates of the patient’s head and the scanned image coordinates; thus, mapping the preoperative planned path coordinates to real space, ultimately allowing the robotic arm to reach the predetermined position to assist in positioning and orientation, primarily used for surgical positioning and orientation assistance.
Five Major Innovative Technologies:
1. Image Fusion Technology: Unique image fusion technology, providing an overview of all information. Compared to stereotactic frame technology, the Huake Precision surgical robot offers advantages such as less patient pain, a wider age range, no implanted dead corners, and higher surgical efficiency. Clinical features: used under general anesthesia with fixed head, painless for patients, can use pediatric head supports, no implanted dead corners, and the time required for stereotactic surgery using the robot is only 1/3 of that required for frame surgery.
2. Vascular Reconstruction: The 3D visualization technology of cranial blood vessels based on multi-modal image fusion used in Huake Precision surgical robots can effectively avoid the risk of intracranial bleeding, combined with high-precision positioning and orientation equipment, significantly reducing the risk of intracranial bleeding. The high-precision force sensing system provides safety assurance.
3. Surgical Details: Huake Precision surgical robots use contactless computer vision or two optional registration methods based on Marker points, achieving less trauma while making surgery more flexible and easy to use. IEBM & collision avoidance algorithms make the product smarter.
4. Facial Registration Technology: Computer vision-based facial registration technology developed by Huake Precision features fully automatic high-precision registration, scanning the skin surface using high-precision cameras to form scanning point clouds, then performing 3D surface registration of the robot and the actual human body surface, significantly improving precision through the optimized LOOWA algorithm, which is Huake Precision’s unique core technology, achieving international first-class precision for surgical robots.
5. Obstacle Avoidance Algorithm: Intelligent environmental obstacle model establishment and obstacle avoidance algorithms use computer vision to acquire and establish actual patient cranial models and fixed frame environmental obstacle models, obtaining the optimal obstacle avoidance path through automatic optimization algorithms, allowing the robot to safely and efficiently move to the planned designated position.

Figure 6: 【Huake Precision】 Neurosurgical Robot
Source: Huake Precision official website
Surgical Robots in Orthopedics
Tianji® Orthopedic Surgical Robot System
The Tianji® orthopedic surgical robot, developed independently by Tianzhihang, is the only orthopedic surgical robot system in China that has passed CFDA certification and is the only system in the world capable of performing full-segment surgeries on limbs, pelvis, and cervical, thoracic, lumbar, and sacral spine.
Tianji Orthopedic Surgical Robot consists of three parts (see Figure 7): which are:
1. Optical Tracking System, the navigation part;
2. Main Robotic Arm
3. Main Control Console, for surgical planning.
The robot scans the patient’s fracture site using imaging equipment to obtain medical images of the fracture site. The doctor completes surgical planning on the robot’s main control console, and then the robotic arm can accurately find this location to assist in the surgery; during the surgery, the navigation part is also responsible for monitoring, automatically tracking and adjusting if there is any positional error.
Tianji® Orthopedic Surgical Robot has five major technical advantages, allowing clinical precision to reach 0.8 mm, reducing intraoperative radiation by over 70%, and improving surgical efficiency by over 20%.
1. Intelligent Assistance, Precise Positioning
The Tianji® orthopedic surgical robot assists doctors in accurately positioning implants or surgical instruments, achieving millimeter-level precision, especially advantageous for minimally invasive procedures and high-risk areas, effectively reducing surgical risks and complications.
● Doctors select 2D or 3D mode according to indications to complete surgical planning;
● The robot accurately moves to the planned position, ensuring the surgical path is consistent with the planned path;
● The robot continuously monitors patient movement and self-corrects.
2. Low Radiation for Patients and Medical Staff
● Based on the robot’s operational process, images are only required to be obtained at three stages: before surgery, after the positioning guide needle is inserted, and after the screw is inserted, significantly reducing the total amount of X-ray radiation.
● During the imaging process, the robot arm stabilizes the instruments and implants, and medical staff do not need to be exposed to the X-ray area, effectively reducing their radiation exposure.
3. Simplifying Complexity and Making Difficulties Easy
● Simplifying surgical steps makes the surgical process smoother; planning multiple screw paths at once, the robot runs to each position autonomously;
● Automatic registration eliminates the need for manual registration;
● Specialized surgical software guidance, with a user-friendly human-machine interface, standardizing the surgery;
● Multi-dimensional image guidance enhances intraoperative monitoring capabilities;
● Stable robotic arm support reduces the fatigue doctors experience from holding instruments for extended periods.
4. Wide Range of Indications
The Tianji® orthopedic surgical robot is compatible with both 2D and 3D surgical planning modes, is flexible in movement, and has a large working range, widely used in full-segment spinal surgery and precise positioning in trauma orthopedic surgery, achieving specialized and versatile use.
● Pedicle screw internal fixation surgery and hollow screw surgery (including cervical, thoracic, lumbar, and sacral vertebrae);
● Percutaneous vertebroplasty;
● Hollow screw fixation surgery for pelvic acetabular fractures;
● Hollow screw internal fixation surgery for femoral neck fractures;
● Intramedullary nail locking;
● Internal fixation surgery for shoulder, elbow, wrist, knee, and ankle joints.
5. Motion Simulation Strategy and Joint Force Control Strategy Ensure Safety for Patients and Medical Staff
● The robot uses motion simulation technology to predict the operating trajectory, avoiding collisions with patients or operators;
● The robot employs joint force control technology to automatically stop when encountering obstacles, preventing damage to patients and medical staff.

Figure 7: Tianji® Orthopedic Surgical Robot System
Source: Tianzhihang official website
“Mate I” Orthopedic Surgical Robot
Developed in collaboration between Weigao Group, the PLA General Hospital, Beijing University of Aeronautics and Astronautics, Beijing Aerospace General Hospital, and Tsinghua Tongfang Dingsheng, the “Mate I” system adopts the internationally first “healthy side mirror-based fracture reduction method” and is the first highly integrated intelligent surgical system for orthopedics, featuring precise navigation, full-process visual operation, high motion precision, high repeatability, and good rigidity stability, providing patients with safer, more reliable, and more effective surgical treatment.

Figure 8: “Mate I” Orthopedic Surgical Robot
Casting Robot – ZOEHON-300
ZOEHON-300 is a minimally invasive implantation robot for pedicle screws, developed by Suzhou Casting Robot Co., Ltd., mainly used for intraoperative navigation of pedicle screw implantation surgeries, assisting doctors in accurately positioning the pedicle screw implantation path.

Figure 9: Casting Robot – ZOEHON-300
Rossum Robot Pelvic Reduction Robot
The Rossum Robot starts from the most challenging pelvic fracture treatment in orthopedic trauma surgery, featuring three-dimensional real-time tracking, automatic surgical planning, and intelligent surgical operation technology, providing automatic surgical planning for reduction and internal fixation, which is currently still in the experimental stage.
Surgical Robots in Laparoscopic Surgery
Minimally Invasive Laparoscopic Surgical Robot System (Developed by Harbin Institute of Technology, Benchmarking against Da Vinci Si)
The domestic minimally invasive laparoscopic surgical robot system has independent intellectual property rights in China. Researchers have made significant breakthroughs in key technologies such as mechanical design, master-slave control algorithms, and three-dimensional (3D) laparoscopic system integration for various surgical procedures, applying for multiple national invention patents. Compared to ordinary surgical procedures, this robot surgery has three major advantages: first, the robotic “doctor” only needs to make a few small incisions on the patient’s skin and can perform surgery with 3-4 surgical instruments not exceeding 10 mm in diameter, resulting in less blood loss, less pain, faster recovery, and smaller postoperative scars; second, the robot’s end tools have multiple degrees of freedom, are dexterous like human hands, yet much smaller, allowing access to surgical positions that are difficult to reach by hand, achieving high-difficulty operations that are hard to accomplish manually; third, the robot overcomes the limitations of human vision, with high-end endoscopes capable of magnifying captured images by over 10 times and presenting them in 3D to the operating doctor, greatly enhancing surgical safety and operational convenience. Currently, doctors can operate this robot to perform separation, cutting, hemostasis, suturing, and other operations under 3D visual feedback during surgeries such as gallbladder removal and nephrectomy. With continuous improvements and enhancements, this system is expected to be widely used in various fields such as thoracic surgery, pediatrics, gynecology, and neurosurgery. (see Figure 10, left)
Minimally Invasive Laparoscopic Surgical Robot System (Developed by Harbin Institute of Technology, Benchmarking against Da Vinci Xi)
This laparoscopic surgical robot system adopts the current popular suspension arm scheme, using a four-arm layout and equipped with the Stroze high-definition binocular endoscope system (see Figure 10, right).

Figure 10: Developed by Harbin Institute of Technology, Suzhou Collaborative Innovation Medical Robot Research Institute – Suzhou Kando Robot Co., Ltd. has independently developed two laparoscopic surgical robots
TuMai™ Toumai™ Laparoscopic Surgical Robot
The TuMai™ Toumai™ (hereinafter referred to as “TuMai™”) endoscopic surgical system (also known as the “laparoscopic surgical robot”) is developed by the Shanghai MicroPort Medical Devices (Group) Co., Ltd. (hereinafter referred to as “MicroPort®”) under its subsidiary MicroPort (Shanghai) Medical Robot Co., Ltd. (hereinafter referred to as “MicroPort® Robot”). It has passed the special review application for innovative medical devices by the National Medical Products Administration on October 17, 2019, entering the special review procedure “green channel”.
The TuMai™ endoscopic surgical system consists of the patient surgical platform, image trolley, and doctor control console, used to assist in completing minimally invasive laparoscopic surgeries, especially those high-difficulty complex surgeries that are difficult to complete with open surgery or conventional laparoscopic techniques. The wrist-type surgical instruments of the TuMai™ system are highly flexible, providing high dexterous motion capabilities in narrow spaces, thereby simplifying originally high-difficulty surgical operations, reducing intraoperative blood loss and complication rates; the 3D laparoscope provides a realistic surgical view, assisting in complex fine surgical operations under laparoscopy; the intuitive master-slave remote operation is sensitive and easy to master, simplifying surgical operations and shortening surgical time.
Application example: Shanghai Oriental Hospital used the TuMai™ Toumai™ laparoscopic surgical robot to complete the robot-assisted laparoscopic radical prostatectomy (RALRP surgery), which is the first RALRP surgery completed by a domestic laparoscopic robot in China. The surgery took 1.5 hours and proceeded smoothly.
“Miaoshou S” Minimally Invasive Surgical Robot
Developed through collaboration between Weigao Group and Tianjin University, the “Miaoshou S” system breaks the foreign technology monopoly and fills a domestic gap, representing a new type of modular assembly surgical robot system. The “Miaoshou S” system has three technical advantages over similar foreign products: it utilizes a multi-degree-of-freedom screw-driven decoupling design technology for minimally invasive surgical instruments, solving the motion coupling problem, ensuring fixation, anti-slip, and anti-loosening, which is more conducive to maintaining precision; it implements a reconfigurable layout principle and implementation technology from the operator’s perspective, making the robot’s “arms” lighter and more adaptable to surgical needs; it employs a system heterogeneous isomorphic control model construction technology, addressing the consistency of hand, eye, and instrument movements in a stereo-vision environment.
Shuchuang Surgical Robot (Hangzhou Shuchuang Robot Co., Ltd.)
Hangzhou Shuchuang Robot Co., Ltd. was established in November 2016. The company is developing the latest generation of modular, lightweight, intelligent, and cost-effective medical surgical robot systems.
After nearly two years of development, the Shuchuang surgical robot has entered the late stage of research and development, with a total of four production lines, including multi-arm robotic application systems, single-arm robotic application systems, 3D endoscope systems, and OMNI 3D visualization platform systems.
Currently, the “Shuchuang Robot” has completed the development of Omni 3D HD, which is a software system for three-dimensional high-definition display in robotic surgery. The OMNI 3D visualization platform system is compatible with the Da Vinci system and is expected to be launched soon.
In addition, the latest research and development by Shuchuang Company, MANTRA (robot multi-arm system), has recently successfully completed a gallbladder removal surgery in collaboration with the collaborative robot company, Siasun.

Figure 11: MANTRA Robot Multi-arm System
Shurui EZ Port Laparoscopic Surgical Robot System
Single-port laparoscopic robot system:
1. EZ Port β Type Single-port Laparoscopic Surgical Robot System
The functional end of this surgical robot includes three surgical execution arms and one visual guidance arm, entering the patient’s abdominal cavity through a 20 mm diameter surgical incision in the abdominal wall, operated by the surgeon using a bilateral force feedback input device located at the robot’s remote operation control console to achieve remote operation of the surgical robot’s functional end during the surgery, allowing for quick replacement of any surgical execution arm carrying different types of surgical executors to perform single-port laparoscopic surgeries, including general surgery, urology, and gynecology.
It mainly consists of two parts:
a. Robot Remote Operation Control Console
Bilateral force feedback input device: Real-time receives the surgeon’s motion input, remotely controlling the motion of the surgical robot system’s functional end, performing the surgery; real-time feedback of the force on the surgical execution arm, combined with the three-dimensional visual feedback from the binocular stereo vision module, accurately presenting the surgical scene on the patient’s side.
Stereo display device: Real-time receives feedback signals from the binocular stereo vision module, based on a large treatment database, integrating image processing technology to accurately reproduce the surgical images and achieve intelligent guided planning.
b. Patient-side Robot Surgical Execution System
High-definition display device and control cabinet: Provide real-time feedback of surgical images to the doctor on the patient side.
High-precision positioning platform: Accurately positions the functional end at the surgical incision site.
Removable sterile barrier: Connects to the surgical robot drive module, isolating the surgical robot drive module, positioning platform, display device, and control cabinet from the sterile environment, ensuring the clinical feasibility of the surgical robot system.
Disinfectable visual guidance arm: Quickly connects to the drive module through the sterile barrier, carrying a binocular stereo vision module at its end.
Disinfectable surgical execution arm: Quickly connects to the drive module through the sterile barrier, carrying an additional surgical executor with one degree of freedom, including separating pliers, flat pliers, needle holders, clamps, electric knives, coagulation pads, and hemostatic clamps.

Figure 12: EZ Port β Type Single-port Laparoscopic Surgical Robot System
2. EZ Port α Type Single-port Laparoscopic Surgical Robot System
The EZ PortTM α Type Single-port Laparoscopic Surgical Robot System is the third-generation functional prototype of minimally invasive surgical robots developed by Beijing Shurui Technology Co., Ltd. The functional end of this surgical robot enters the patient’s abdominal cavity through a 12 mm diameter (the world’s smallest) surgical incision in the abdominal wall, operated by the surgeon using a remote motion input device to achieve remote operation of the surgical robot’s functional end, thereby performing single-port laparoscopic surgery.
Surgical performance process:
The carrier robotic arm can carry the surgical robot system’s functional end into the patient’s abdominal cavity, with the remote motion center point located at the surgical incision.
The visual guidance arm carrying the binocular stereo vision module enters the abdominal cavity through a sheath, adjusting to the appropriate imaging angle and allowing the passage of the sheath.
Two surgical execution arms with an outer diameter of 6.35 mm sequentially enter the abdominal cavity through the sheath, laterally expanding to form a triangular surgical posture, performing single-port laparoscopic surgery.
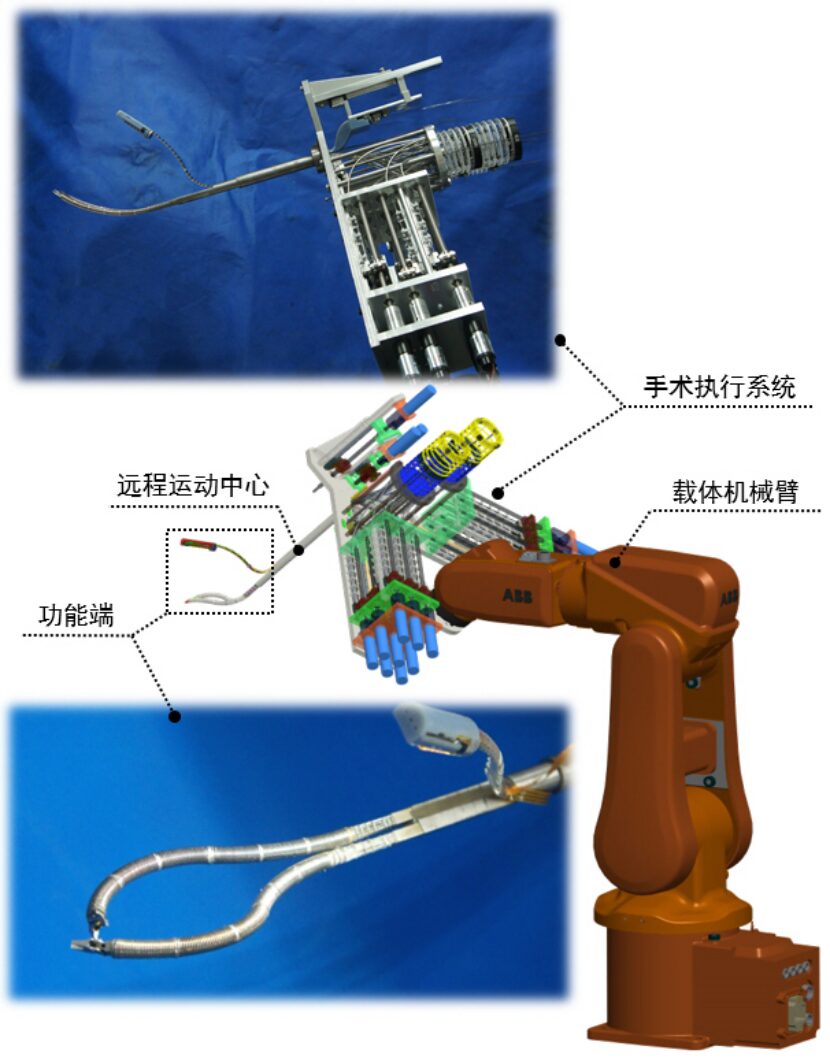
Figure 13: EZ Port α Type Single-port Laparoscopic Surgical Robot System
Multi-port Laparoscopic Robot
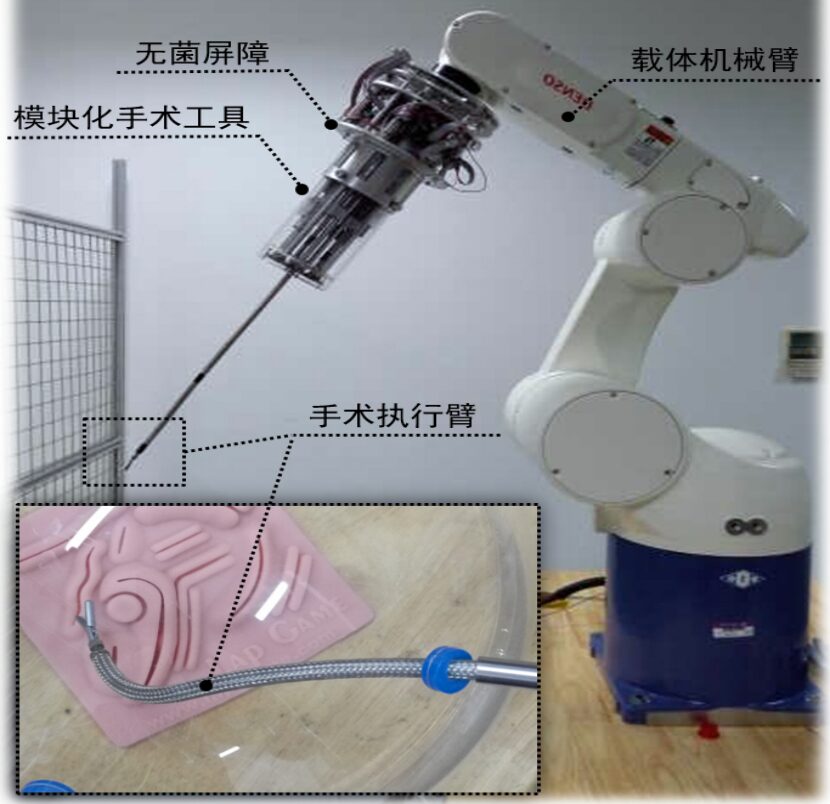
1. Modular Multi-port Laparoscopic Surgical Robot System II
The Modular Multi-port Laparoscopic Surgical Robot System II is a functional enhanced system built by Beijing Shurui Technology Co., Ltd. based on the Modular Multi-port Laparoscopic Surgical Robot System I for clinical applications.
This surgical robot system can include four surgical execution systems, carrying at least three surgical execution arms and one visual guidance arm. A single surgical execution arm enters the patient’s abdominal cavity through a surgical incision with a diameter of 10 mm, operated by the surgeon using a remote motion input device to achieve coordinated control of multiple surgical execution systems, thereby performing multi-port laparoscopic surgeries aimed at general surgery, urology, gynecology, and thoracic surgery.
It mainly consists of two parts:
a. Robot Remote Operation Control System
Remote operation input device: Outputs the surgeon’s hand operation motion in real-time to the surgical execution system to achieve remote operation of surgical movements.
Display: Real-time display of surgical images transmitted back from the binocular stereo vision module.
b. Patient-side Surgical Execution System
Carrier robotic arm: Carries modular surgical tools or imaging tools to achieve wide-range movement, accurately positioning them at the corresponding surgical incision and performing surgery while avoiding pulling on the skin around the surgical incision through constraint algorithms.
Sterile barrier: Isolates the non-sterile parts of the surgical execution system from the sterile surgical environment, and quickly connects to the already sterilized surgical execution arm, ensuring the clinical feasibility of the surgery.
Modular surgical tools: Carry different types of surgical executors, achieving small-range precise movements and performing surgeries.
Imaging tools: Carry a binocular stereo vision module, providing real-time feedback of surgical images.