1. Overview of Aesthetic Robots
Aesthetic robots specifically refer to medical robots that apply robotic technology in the field of medical aesthetics within hospitals, clinics, and other medical institutions to achieve medical or auxiliary medical purposes. Medical aesthetics includes all medical treatments aimed at changing appearance or improving physiological functions, primarily through surgery, medical devices, drugs, and other medical technologies. It can be divided into surgical and non-surgical categories. Surgical aesthetic treatments aim to improve appearance through surgical procedures, mainly including cosmetic surgery; non-surgical treatments mainly include injection-based aesthetic treatments, energy-based aesthetic treatments, and other non-surgical aesthetic treatments.
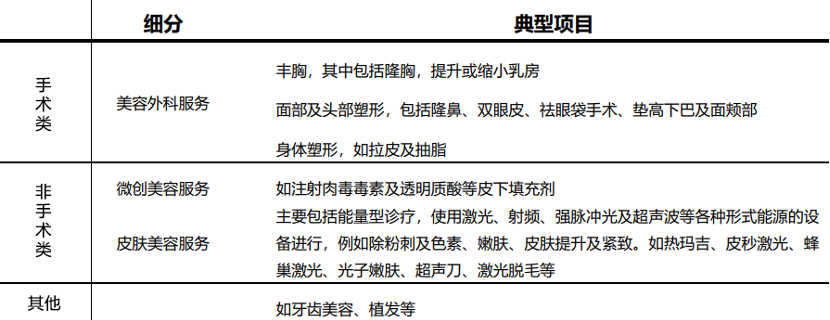
Classification of Medical Aesthetic Services
Life beauty, on the other hand, refers to non-medical means such as cosmetics, health products, and non-medical devices that perform non-invasive beauty care like skin management, massage, and hairdressing. Various robots used in non-medical scenarios such as beauty salons and hairdressing shops are not discussed in this chapter.
According to the existing classification guidelines from the International Federation of Robotics (IFR) and combining information from mainstream foreign academic journals and medical device manufacturers’ product materials, aesthetic robots have not appeared as a separate product category abroad. Aesthetic procedures in hospitals are also a cross-departmental concept, possibly involving departments such as dermatology, minimally invasive surgery, dentistry, and plastic surgery, including hair transplant departments. Many hospitals have proposed “multi-department collaborative treatment,” which is the launch of cross-departmental collaborative plans. Based on these two points, it is difficult to classify and define aesthetic robots based on their structure, but they often contain several major elements of the broad definition of “medical robots”: servo motors, reducers (key components of serial robots, some parallel structured maxillofacial surgical robots may not require them), controllers, and navigation systems. Currently, there are multiple robots applied in specific aesthetic scenarios, such as maxillofacial cosmetic surgery robots, hair transplant robots, injection robots, ultrasound lipolysis robots, etc.; as well as the application of traditional surgical robots in the field of aesthetics, such as the Da Vinci robot in breast reconstruction and breast cancer surgeries.
Advantages of Aesthetic Robots: Dr. Chai Gang, Chief Physician of the Department of Plastic Surgery at the Ninth People’s Hospital affiliated with Shanghai Jiao Tong University School of Medicine, pointed out at the 18th National Academic Exchange Conference of the Chinese Medical Association’s Plastic Surgery Branch that aesthetic robots have significant advantages compared to manual procedures. 1) Its “eyes” have higher precision. Aesthetic robots can overlay imaging information onto actual surgeries, achieving deeper visibility and broader recognition than the naked eye, allowing for more precise localization of the surgical site. 2) Its “hands” are more stable. The continuous stability of surgical robots far exceeds that of human hands, with errors measured in millimeters. Moreover, they possess tactile feedback, making it easier for doctors to perform complex and difficult surgeries in confined spaces. Additionally, surgical robots have excellent control devices; if a doctor touches a dangerous area, the robot will automatically identify and alert, assisting the doctor in performing surgery within safe limits. 3) Its “brain” computes faster. For example, designing a surgical plan manually might take a doctor 30 minutes, but if we provide sufficient data to the surgical robot, the design time can be reduced to 0.4 seconds, greatly saving time and manpower.
Incorporating the above advantages into the specific application scenario of maxillofacial cosmetic surgery, the advantages of aesthetic robots compared to manual procedures will be more apparent and intuitive. Since aesthetics must consider both medical and aesthetic aspects, the anatomical characteristics of Eastern and Western ethnic groups have different standards for facial aesthetics, thus in developing and constructing maxillofacial cosmetic surgery in China, it is essential to combine the morphological characteristics of various ethnic groups in China while learning from and referencing advanced foreign experiences, collecting and statistically analyzing data on the facial characteristics of Chinese people, and continuously researching and improving the diagnosis and treatment of various maxillofacial deformities. In recent years, significant progress has been made in digital medicine, 3D printing technology, and VR, AR technologies related to medical aesthetics, allowing aesthetic robots to present surgical plans that better align with Eastern aesthetics during the surgical design phase. Leveraging their more precise positioning and more stable operations, aesthetic robots can perfectly present the plans, achieving treatment goals that satisfy both doctors and patients.
Scale of the Aesthetic Industry: The global aesthetic market has entered a stable development phase, with China’s aesthetic market growth leading globally and currently in an accelerated growth phase. According to a report from the International Society of Aesthetic Plastic Surgery, the global aesthetic market size was approximately 135.7 billion USD in 2018, with a projected 7.05% CAGR from 2018 to 2022, expecting to reach 178.2 billion USD by 2022. With the increase in disposable income per capita and the public’s growing acceptance of aesthetic procedures, various factors are driving the robust development of China’s aesthetic market. According to iResearch Consulting’s forecast, the scale of China’s aesthetic market reached 176.9 billion RMB in 2019, and it is expected to increase to 311.5 billion RMB by 2023, with a 15.19% CAGR from 2019 to 2023.
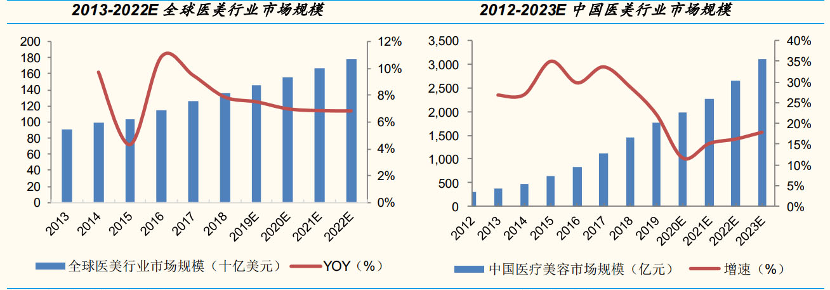
Data Source: ISAPS, Guojin Securities Research Institute
From the Demand Side of Aesthetics, aesthetic consumers have high demands for doctors’ medical skills and aesthetic levels, but there is a high degree of information asymmetry. At one point, there was a surge in “medical tourism” to Japan and South Korea for aesthetic experiences. Since robotic technology can significantly overcome geographical limitations in surgeries, aesthetic robots can effectively address these pain points. According to Frost & Sullivan data, China’s aesthetic penetration rate was only 3.6% in 2019, far below Japan’s 11%, the USA’s 16.5%, and South Korea’s 20%, indicating that the industry is about to enter a golden period. First-tier cities and the 95 post-90s young demographic are the main consumer force in aesthetics. The increase in disposable income, the expansion of the age structure of aesthetic consumers, and the improvement in acceptance of aesthetics mean that the population in first-tier cities with strong purchasing power is the primary consumer group in aesthetics, with a higher conversion rate of consumers.
From the Supply Side of Aesthetics, as of 2020, there are over 4000 formal institutions in China’s medical aesthetic industry. Currently, only 12% of institutions legally and compliantly conduct aesthetic projects, while the number of non-compliant institutions exceeds 80,000. Formal medical aesthetic institutions in China include the cosmetic departments of public hospitals, large chain aesthetic groups, and small to medium-sized private aesthetic institutions. However, some private clinics and beauty salons also conduct non-formal practices, resulting in a large number of aesthetic institutions with varying quality. Aesthetic robots can provide standardized services for the aesthetic industry, contributing to the overall professionalization and compliance of the industry, with a potential customer base that is vast. Although there is a lack of authoritative statistics on the market size of aesthetic robots, based on existing data, we optimistically estimate that the market size of the aesthetic robot industry should be in the hundreds of billions.
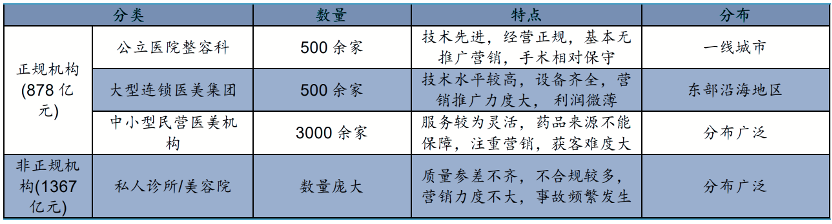
Statistics of Various Aesthetic Institutions
Due to the extensive application fields of aesthetic robot design, non-surgical aesthetic robots primarily serve as replacements for manual operations in simpler aesthetic services like ultrasound lipolysis, laser skin rejuvenation and whitening, injection of hyaluronic acid, etc., and there are many types. The technical advantages are questionable, and the barriers to entry are not high, so they are not discussed here. Below, we will explain the application scenarios of representative maxillofacial cosmetic robots, hair transplant robots, and dental robots in surgical and other aesthetic services.
2. Application Scenarios of Maxillofacial Cosmetic Surgery Robots
Maxillofacial cosmetic surgery mainly refers to various surgeries that change facial shape, such as zygomatic reduction surgery, mandibular angle reduction surgery (square face to oval face), and chin horizontal osteotomy advancement surgery (correcting small chin), etc. The business scope of maxillofacial cosmetic surgery encompasses congenital deformities of the entire skull and facial area as well as various skeletal deformities and soft tissue organ deficiencies caused by trauma or disease. Maxillofacial cosmetic surgery robots are medical robots specifically designed to perform maxillofacial cosmetic surgeries, primarily conducting drilling, bone cutting, and bone grinding operations on the maxillofacial area, sharing many similarities in technical actions with orthopedic robots. However, due to the complex anatomical structure of the maxillofacial area, the dense distribution of sensory organs, and the severely limited surgical field of view in most cases, the complexity of the surgery is significantly increased due to the presence of important nerves and blood vessels within or surrounding the bony structures.
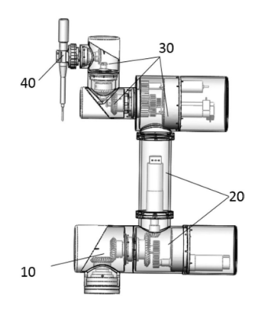
Patent Application Number for “Maxillofacial Cosmetic Surgery Robot”: CN 107280764 A
The use of traditional surgical robots like the Da Vinci system in maxillofacial cosmetic surgery is not ideal, as the Da Vinci robot is quite bulky, making it challenging to operate in confined spaces like the oral cavity. Several medical robot patents specifically targeting maxillofacial cosmetic surgery have emerged domestically. Taking the “Maxillofacial Cosmetic Surgery Robot” patent from Shanghai Jiao Tong University as an example: Before the surgery, a three-dimensional model of the affected area is reconstructed using the patient’s CT images, and surgical planning is performed preoperatively in the software to achieve necessary surgical operations such as drilling; a matching occlusal plate marker is set based on the patient’s physical model (and the coordinate origin is determined); after debugging the robot’s corresponding programs, the doctor loads appropriate surgical tools into the robot’s end effector; once the doctor activates the robot, it completes the surgery according to the surgical plan, with the doctor intervening in emergencies to complete the surgery. It can be seen that the maxillofacial cosmetic surgery robot in this example directly performs bone cutting according to preset program algorithms and parameters, and after the surgical plan is specified, this robot requires no human operation, only needing the doctor to start and stop the robot’s actions, with no changes allowed during the surgery, similar to the Robodoc orthopedic robot from Think Surgical. We believe that among the mature products in orthopedic robots, some can be refined through technical modifications for use as maxillofacial cosmetic surgery robots in aesthetic scenarios.
3. Application Scenarios of Hair Transplant Robots
In a fast-paced society, the rate of hair loss among the existing population in China remains high. Hair loss can be classified into pathological and physiological types, with androgenetic alopecia being the most common form of pathological hair loss, with approximately 21.3% prevalence in males, significantly higher than the 6% in females. Physiological hair loss refers to the natural shedding of healthy hair during the resting phase of the hair cycle, such as telogen effluvium. Hair transplant surgery is a crucial method for treating hair loss. The principle of hair transplantation is to extract high-quality hair follicles from the occipital area and transplant them to the scalp area that is bald or thinning, fundamentally addressing issues like baldness, hair loss, and unattractive hairlines.
China’s hair medical service industry can be roughly divided into three stages. 1 The budding stage: In the 1970s, Shanghai Xinhua Hospital used a large-diameter drill to extract hair follicles, becoming the first hospital in China to perform hair transplants, marking the start of the hair transplant industry in China; 2 Gradual development stage: Various hair transplant technologies were gradually introduced to China. In 1997, Beijing Yimeier Jianxiang Hospital introduced the Minimicro (single hair follicle transplantation) technique to China. In 2005, the ZhiXin (International) Hair Transplant Center was established and successfully performed China’s first FUT (Follicular Unit Transplantation, removing a patch of skin with hair) surgery. In 2006, Kefa Yuan introduced micro-needle hair transplant technology, and in 2007, Yonghe Hair Transplant Research Center introduced FUE (Follicular Unit Extraction, extracting dispersed hair follicles without scarring) technology to China; 3 Rapid development stage: In 2016, the first International Hair Transplant Academic Conference was held in China. In 2017, Yonghe introduced ARTAS hair transplant intelligent equipment, effectively shortening surgery time. In 2019, Xinsheng Hair Transplant independently developed 3D hair transplant technology to improve hair density. This stage saw capital gradually entering the hair medical service industry, such as 2017 when CITIC Industrial Fund invested in leading hair transplant company Yonghe, which subsequently increased its marketing investment, enhancing brand and industry awareness and leading the hair medical service industry into a rapid development phase.
The disadvantages related to hair transplant technology include that it is a lengthy, labor-intensive, and complicated process, with a typical hair transplant surgery usually requiring the doctor to spend 5-8 hours to complete. Additionally, due to the labor-intensive nature of the process and the fact that all personnel involved are highly skilled, trained, and experienced, this process can be a very expensive procedure, especially since both the hair follicle separation and implantation stages require a considerable amount of manual labor. Hair transplant robots assist doctors in consistently, precisely, and repeatedly extracting hair follicle units through computer 3D imaging-assisted systems and built-in algorithms, gradually achieving a fully automated transition from extraction to implantation. With continuous optimization of technology, the speed of hair follicle extraction and the quality of extraction are gradually improving, effectively liberating the labor of doctors and nurses during surgery.

ARTAS Hair Transplant Robot
The ARTAS hair transplant robot consists of a set of robotic arms, dual needles, imaging capture, and application interface. Utilizing two sets of lenses and special software, it accurately assesses the depth, thickness, angle, direction, and distribution of individual hair follicles, extracting them quickly with minimal damage, while being time-efficient, effortless, uncomplicated, and more economical, effectively replacing manual processing, thereby reducing the labor intensity of medical personnel and improving the accuracy and outcome of the surgery.
4. Application Scenarios of Dental Robots
Dental medical robot technology can first be used for a large number of similar daily repetitive tasks in dental care, such as various tooth preparations, periodontal cleaning, root canal preparation, oral restoration, orthodontic bracket bonding, and archwire adjustments. Although there are individual differences, the content and process similarity is quite high, making them clinical repetitive labor that is physically demanding and inefficient. Theoretically, dental medical robot technology can achieve full automation in certain dental medical procedures, such as denture fabrication, tooth preparation, tumor localization puncture surgeries, and dental implant positioning. Below, we will focus on the applications of robots in tooth preparation, dental implants, and orthodontic archwire bending.
(1) Tooth Preparation: Tooth preparation involves shaping teeth to restore defects as needed. Over-preparation cannot be remedied since once tooth structure is removed, it cannot be restored. Currently, the mainstream tooth preparation method involves dental practitioners judging based on personal visual assessment and clinical experience to grind the tooth structure. However, the oral cavity is confined, leading to visual blind spots, and prolonged manual operation can result in unavoidable tremors due to fatigue, leading to deviations from the ideal preparation. To achieve more efficient and precise tooth preparation, tooth preparation robots have emerged.
In 2015, Otani et al. used a six-degree-of-freedom robotic arm to control a turbine handpiece for tooth preparation; first, a three-dimensional scanner scanned the dental model, and the data was imported into the Computer-Aided Design and Computer-Aided Manufacturing (CAD/CAM) system for tooth preparation plan design, and finally, the robot performed the tooth preparation according to the plan. Experimental results on resin teeth showed that for the buccal surface and incisal edge, the precision and accuracy of the tooth preparation robot were similar to traditional manual tooth preparation; however, for the margin line, the robot’s precision and accuracy were higher.
Although the amount of tooth preparation varies based on individual patient conditions, the workflow and content of tooth preparation are highly similar, allowing robots to repeat the same actions precisely without the operational deviations caused by physical fatigue, making them well-suited for the tooth preparation field. However, currently, there are few developments in tooth preparation robots, and none have been clinically used, indicating significant room for exploration in applying robots for tooth preparation.
The “Robot Automated Tooth Preparation System” from Peking University School of Stomatology uses femtosecond lasers for tooth preparation.
The research team led by Professor Yuan Fushong at Peking University School of Stomatology developed the world’s first robot automated tooth preparation system, which combines robotic automation technology with femtosecond laser technology, enabling autonomous control of tooth preparation by strictly adhering to clinical medical standards and norms; additionally, this system can be integrated with currently advanced digital denture fabrication equipment and 3D printing devices to quickly and accurately complete denture restoration treatment. In 2018, Peking University School of Stomatology signed an exclusive 20-year patent usage agreement with an Israeli robotics company, ROBOToo, for commercializing this patented technology, manufacturing, selling, and globally promoting this system.
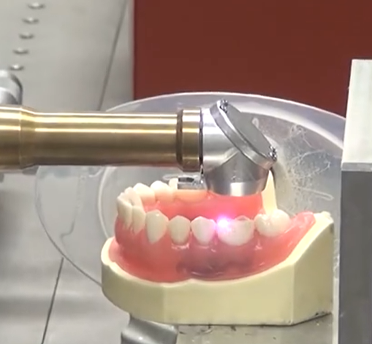
(2) In the Implant Field: In the field of implants, robots replacing manual operations for implanting have gradually become the preferred treatment option for missing teeth. To prevent patients from suffering complications such as nerve damage and severe bleeding during the implant process and to eliminate operational discrepancies arising from varying clinical experiences of physicians, some scholars have proposed using robotic tactile drilling systems for manual implant surgeries to simulate feedback of cutting force and model the cutting force against computed tomography values. This system allows dental students to learn and practice the drilling process on the jawbone and helps doctors pre-perceive cutting force feedback before implant surgeries.
In recent years, thanks to the application of optical navigation technology in dental implant surgery robots, surgeons can monitor the depth, angle, and positional relationship of the drill bit with adjacent anatomical structures in real-time during the preparation process, achieving visual operations that ensure the safety of implant surgeries. This technology possesses greater application advantages than traditional implant guides and has gradually developed dental implant surgery robots towards full automation. However, challenges remain in the research of dental implant surgery robots, such as the complex preparatory work required for optical navigation systems, including cone beam CT imaging, selection of tracking markers, calibration of coordinate systems, etc. Any error in these steps can affect navigation accuracy. Furthermore, how the robotic arm adjusts the force based on bone density and how to optimize the structure of the dental implant surgery robot’s end effector and optimal path planning within limited working space are also key research areas for future dental implant surgery robots.
The surgical process for dental robots can be generally divided into three steps: 1 Preoperative surgical planning by the doctor: Before surgery, the implant recipient undergoes CBCT (Cone Beam Computed Tomography, used for dental and maxillofacial areas) scanning, with software automatically collecting detailed data on the teeth, alveolar bone, nerve canals, maxillary sinuses, etc., for the doctor to reference and formulate the surgical plan. 2 Selecting the type of implant: Subsequently, the robot’s optical tracking positioning device captures the mechanical arm and patient’s position in real-time, quickly and accurately identifying any minute displacement of the implant recipient and calibrating the mechanical arm to the correct preparation position. 3 The robot’s mechanical arm accurately implants the implant into the required position: Next, the mechanical arm reaches the designed preparation position accurately, and the doctor advances the holder according to the direction set by the robot, guiding the drill bit to the designated implant position, completing the positioning, hole preparation, and implant insertion operations.
(3) In the Orthodontics Field: Bending orthodontic archwires is complex and detailed, often requiring orthodontists to invest significant time and effort. With the rapid development of computers, imaging, and robotics, orthodontic robots are also beginning to enter the clinical practical stage. Precise bending of archwires is a key technology in fixed orthodontic treatments, and compared to traditional manual bending, using robots for archwire bending offers higher precision and efficiency. Some scholars have designed an archwire bending robot with two claws that can achieve precise and automatic bending of archwires when used in conjunction with the Sure Smile system. Other scholars have constructed an orthodontic archwire bending robot system consisting of a MotomanUP6 robot, archwire bending actuator, and related control software, optimizing the bending process, speed, angle, and corner selection, ultimately achieving bending of 4 types of orthodontic archwires. Researchers have developed a robot system for precision and rapid bending of orthodontic archwires (the LAMDA system), which adopts a gantry structure, achieving high bending precision and efficiency while being relatively low-cost, though it can only bend flat curves. In 2013, Jiang Jixiong constructed a robot for bending archwires using a third-order S curve control method and conducted in-depth studies on the control points during the archwire bending process, achieving an archwire forming accuracy of 4.6%~10.5%.
Process of Automatic Bending of Personalized Archwires by Robots
5. Major Technical Challenges
1. Technical Challenges of Maxillofacial Cosmetic Surgery Robots
Maxillofacial surgeries require high precision, and manual surgeries can lead to poor surgical precision, making it difficult to achieve precise control over the surgical process. The more complex the maxillofacial surgery, the more limitations arise. Therefore, maxillofacial medical surgery robots, leveraging the advantages of image navigation and the stable and precise operations of robots, are significant in reducing surgical trauma, improving the quality and safety of surgical treatments, lowering surgical complications, and reducing patient recovery time.
Image Navigation System for Maxillofacial Surgery: Image navigation technology utilizes processed medical imaging data to assist doctors during clinical surgeries. By reconstructing the patient’s three-dimensional anatomical structure during surgery, it can more accurately and intuitively guide the expected position within the patient’s body. Image navigation technology realizes real-time interaction between medical images, surgical areas, and surgical machinery, breaking through the limitations of traditional surgical navigation. This not only enhances surgical precision but also reduces trauma and surgical complications, thereby improving surgical safety and success rates. It consists of five implementation steps: image acquisition, preoperative planning, intraoperative tracking, intraoperative matching of patient images with preoperative planning images, and tracking position feedback. This is just one approach to using image navigation, and each component can be executed in various ways, depending on the specific system, methods, and processes, and certain components may not be necessary.
For image navigation systems, the positioning accuracy of the target area is the most critical technology, namely the matching accuracy between preoperative images and the actual surgical area. The earliest navigation systems were mechanical navigation positioning, with the most representative clinical application being stereotactic frames, which can achieve navigation positioning accuracy of 2.0 to 3.0mm. Its advantages are precision and stability, and it has been widely used in orthopedics, but it has poor follow-up performance and is invasive. In the late 1980s, ultrasound navigation technology and electromagnetic navigation technology developed rapidly. The principle involves using ultrasound (or electromagnetic) emitters to send ultrasound (or electromagnetic) waves, analyzing the differences in phase and intensity of signals received by monitors to calculate the spatial pose information of the target area. However, in terms of navigation positioning accuracy, it is generally 2.0 to 5.0mm. The optical navigation positioning system is currently the most accurate method, achieving precision of 0.1 to 1.0mm. Its principle involves using two or more optical cameras to monitor the target’s characteristic markers and calculate the characteristic points’ three-dimensional spatial pose information by matching. Unlike other surgical procedures, maxillofacial cosmetic surgeries have finely complex anatomical structures, numerous osteotomies, complicated surgical plans, and difficult exposure of the surgical field, often leading to blind osteotomies that can easily damage nerves and blood vessels. Although ordinary optical navigation systems have high accuracy, the optical reflective markers that accompany them need to be installed on the patient, which not only adds invasiveness and increases the patient’s suffering but can also lead to surgical navigation failure due to obstruction by surgical machinery. Therefore, the use of optical navigation systems in maxillofacial cosmetic surgery is relatively rare.
Augmented Reality (AR) Technology was proposed by Boeing’s Tom Caudell in 1990. Unlike other navigation systems, AR can overlay computer-generated virtual image information onto the real environment, allowing them to appear together in the operator’s field of vision, forming a visual image that merges the real and virtual, enhancing the understanding and perception of real objects. In recent years, AR technology has become a hot topic in medical research. Doctors can utilize AR technology to assist in designing surgical plans, provide intraoperative guidance, and simulate surgical skills training. The advantages of augmented reality technology in maxillofacial cosmetic surgery are that it provides doctors with direct awareness of the location of critical structures and assists in preoperative planning, facilitating precise execution of operations, significantly enhancing the doctor’s confidence during surgery. Another advantage is that using augmented reality navigation systems allows doctors to visually observe both the surgical field and virtual area information without the need for additional matching of surgical instruments, avoiding the cumbersome steps and errors that arise during registration, making AR an excellent solution for cosmetic surgery.
2. Technical Challenges of Hair Transplant Robots
Taking the currently most well-known hair transplant robot, the ARTAS hair transplant robot, as an example, the core technologies of the ARTAS hair transplant robot include a visual system, robotic control arm, 3D reconstruction design software, and dual needles (ring biopsy needles). The visual system employs 3D visual algorithms to identify the growth angle, density, thickness, length, and grouping of hair follicles, determining the grafts to be dissected and the optimal sequence for dissection. The robotic control arm calculates the spatial position and robotic dynamics to control the needle’s position and overall path, while the arm provides more precise control over the puncturing depth. The dual needles consist of an inner sharp needle for cutting the outer epidermis and an outer blunt needle for separating subcutaneous tissues, effectively avoiding damage to hair follicles. The 3D reconstruction design software enables preoperative planning to design the patient’s post-operative hair density and growth pattern. Compared to manual extraction of hair follicles, robots can intelligently plan the puncturing path based on their algorithms, accurately extract hair follicles, and significantly reduce the transection rate, leading to better postoperative outcomes. The robotic arm’s precise control of puncturing force and its ability to compensate for patient movement ensure the safety of the surgery.
3. Technical Challenges of Dental Robots
Broadly, implant surgeries encompass the overall concept that includes preoperative design, implant placement surgeries, surgical procedures under special conditions, implant denture restorations, and other related techniques. The core objective of dental implant surgeries is to accurately and stably place a titanium alloy implant into the pre-designed location within the jawbone, forming good osseointegration during subsequent healing. The core action of dental implant surgeries is preparing the hole to provide a position for the titanium alloy implant, while other actions are primarily preparatory for the hole preparation. Before performing dental implant surgeries, it is necessary to plan the number of implants to be placed, the pose in which the implants will be embedded in the alveolar bone, and the specifications of the implants, including diameter and thread type.
The dental implant robot system is a medical surgical robot system that comprehensively applies technologies such as visual sensing, mechanical sensing, three-dimensional visualization, and micro-robotics. The model accuracy experiments for the implant model have special requirements. First, during drilling experiments, the implant model should not wobble or move significantly, requiring sufficient fixing strength between the model and the implant platform to achieve a stable connecting structure, which cannot be realized on a plaster model; during implantation experiments, surgical navigation requires a three-dimensional digital model of the implant model, and using CBCT scanning to obtain the three-dimensional digital model inevitably introduces CBCT scanning errors, interfering with later accuracy analysis; simultaneously, the accuracy of the implant model and the surface morphology of the implant area also impact subsequent accuracy analysis, ensuring the accuracy of each implant model and the surface morphology of the same category of implant models is crucial for the accuracy of experimental results; finally, the model accuracy experiments require a large number of implant models for accuracy evaluation, making it necessary to solve the issues of convenient storage and transport.
6. Major Company Situations
Key international market participants involved in aesthetic robots include ARTAS hair transplant robot from Restoration Robotics (merged with Venus Concept), Intuitive Surgical (traditional surgical robots used in aesthetics), Neocis (dental robot Yomi), etc. The aesthetic robot industry in China started late but is developing rapidly, showing trends of catching up with European and American products in niche areas.
1) Restoration Robotics
Restoration Robotics (NASDAQ: HAIR) is a medical device company based in Mountain View, California, dedicated to transforming the hair restoration field. It developed the ARTAS system, a computer-assisted, doctor-controlled robotic hair transplant system, which received FDA approval in the USA in 2011. The ARTAS hair transplant robot is the result of 12 years of research and testing by Dr. Gabe Zingarentti and his R&D team, recognized as the industry’s leading hair transplant robot. In March 2019, Restoration Robotics merged with aesthetic technology company Venus Concept, with the new company’s stock code being VERO.
2) Neocis
Neocis is a dental robot developer based in Florida, USA. The Yomi system, which has received FDA 510(k) approval, is the first dentist-guided system approved in the USA, rapidly expanding commercially post-approval. Neocis is committed to developing robotic technology for the healthcare industry, and the Yomi system assists in surgical procedure planning, supported by software that renders the patient’s teeth. Surgeons can freely adjust surgical plans during the operation, and the platform can complete surgeries within 90 minutes using third-party implants.
Neocis’ main investors include Mithrill Capital Management, Norwest Venture Partners, HealthTech Capital, etc.
3) Intuitive Surgical
In 2001, Intuitive Surgical developed the Da Vinci surgical robot system, which received FDA certification. The Da Vinci system also uses a master-slave teleoperation mode to control the movement of robotic arms, mainly consisting of a doctor’s control console, bedside robotic arm system, surgical instruments, and endoscopic imaging system. Unlike the ZEUS robot, whose robotic arm is integrated with the surgical bed, the Da Vinci robotic arm is mounted on a mobile platform that is separate from the surgical bed and equipped with movable wheels, allowing doctors to arrange it next to the surgical bed based on different surgical spaces, thus increasing the working space of the robotic arm.
The bedside robotic arm system includes 3 instrument arms and 1 endoscope-holding arm, each robotic arm has 7 degrees of freedom, with 4 passive degrees of freedom for preoperative positioning and 3 active degrees of freedom for surgical operations. The doctor’s control console integrates the main operating hand, control foot pedals, and three-dimensional stereo vision endoscopic display system, allowing doctors to control the robotic arms through the foot pedal switch to complete the surgery.
The Da Vinci system is currently the most successful clinical surgical robot system in the world, providing doctors with the same intuitive surgical field and operational range as traditional open surgeries while filtering out hand tremors and reducing doctor fatigue. To date, the system has completed over 2 million surgeries globally, and the latest generation Da Vinci Xi system further optimizes the core functions of the Da Vinci, enhancing the flexibility of the robotic arms and covering a broader range of surgical sites.
4) Dikeer
Dikeer was established in 2010 and is a high-tech medical device company focused on the development and industrialization of surgical navigation robots. The company has developed several core products around dental implant surgeries and plans to expand the navigation robot concept to other departmental applications in the future.
Dikeer has established a professional dental team with an average of over 15 years of industry experience, starting from the development of dental implant surgical systems and expanding to other departments. The core product “Easy Implant” is the only dental implant surgical real-time navigation system in China with a registered class III certificate, already entering top dental hospitals like Peking University, Wuhan University, and West China Hospital, achieving stable high growth in sales over the years. To date, Dikeer has applied for over 40 invention patents, further consolidating its leading position in the dental field through surgical teaching systems and orthodontic businesses while actively promoting the application of surgical navigation systems in other departments, striving for a comprehensive layout across multiple departments to form a synergistic effect.
In June 2021, Suzhou Dikeer Medical Technology Co., Ltd. announced the completion of nearly 100 million RMB in Series C financing, led by Hengxu Capital, with existing shareholders including Huiding Capital participating in the investment, and Jinyu Maowu invested in the project in 2017.
5) Bangce Medical:
Bangce (Shanghai) Robotics Co., Ltd. is a technology enterprise that integrates healthcare, robotics, and artificial intelligence. Bangce is an innovative company incubated under Harbin Institute of Technology Intelligent (000584.SZ), building China’s first AI+ROBOT+IMAGE medical robot platform. The company focuses on real-time imaging navigation for soft tissue punctures, applicable in tumor punctures, medical aesthetic hair transplants, vascular interventions, and nerve block anesthesia, and can also be expanded to applications in tumor interventional biopsies, ablation, particle implantation, and nerve block anesthesia navigation in the thoracic, abdominal, and pelvic areas.
The team has over 10 years of experience in industrialized robot development, with a solid R&D foundation in AI imaging and robotic control. The soft tissue intervention navigation technology and product development progress developed by the company are at the forefront in China.
The company’s main product, the hair transplant robot, has completed product development and has officially entered clinical trials, with expectations to obtain class III medical device registration in 2024; subsequent developments of percutaneous intervention navigation robots, including applications in the prostate, liver, kidneys, lungs, and nerve block, will gradually enter clinical trials.
Jinyu Maowu invested in this project in 2022, and the company has since completed 2 rounds of follow-on financing, led by Shenzhen Capital Group, with Huayi Capital and Huading Investment participating; the company is currently preparing for Series B financing.
6) Beijing Baihui Weikang Technology Co., Ltd.:
Beijing Baihui Weikang Technology Co., Ltd. was established in 2010 and is headquartered in Beijing, specializing in the R&D, production, sales, and operation of medical robots. Its main product is a neurosurgical robot. Baihui Weikang has obtained 8 invention patents and over 10 software copyrights and other patents in related fields. The company has created multiple firsts in clinical applications of surgical robots in China, including the first successful application in clinical practice, the first remote surgery in China, and the first neurosurgical robot certified by NMPA.
The main product of Baihui Weikang is the neurosurgical robot. After 20 years of technological accumulation, 17 years of clinical exploration, over 20,000 clinical surgeries, and 6 product iterations, Baihui Weikang launched the latest product, the “Ruimi” neurosurgical robot, which is widely used in the surgical treatment of nearly a hundred diseases, including cerebral hemorrhage, brain cysts, Parkinson’s disease, and epilepsy. The “Ruimi” neurosurgical robot consists of real-time cameras, automatic robotic arms, and self-developed computer software, integrating three-dimensional model auto-generation, surgical planning, real-time navigation, and surgical operations throughout the process, which is a first in China. The “Ruimi” neurosurgical robot is the second neurosurgical robot approved in its place of origin worldwide, assisting doctors in locating subtle lesions within the skull without craniotomy, significantly reducing the physiological and psychological burdens on patients and achieving high-precision minimally invasive surgeries. To date, the “Ruimi” has successfully completed over 20,000 cases of cerebral hemorrhage, Parkinson’s disease, epilepsy, and other diseases in over 20 hospitals in China.
The company’s new product, the “Ruimi Bo” dental surgery robot, has received NMPA certification, making it the first surgical robot approved for the dental field in China. Thus, the company has become the first in China to obtain class III medical device registration certificates for surgical robots in two different surgical fields (neurosurgery/dentistry).
7) Yake Wisdom (Beijing) Technology Co., Ltd.:
The company is a high-tech enterprise specializing in the R&D, production, sales, and after-sales service of medical robot products. The company has strong technological and talent reserves and has in-depth cooperation with well-known domestic hospitals such as the Air Force Medical University Stomatology Hospital, 301 Hospital, and Beijing Medical University Third Hospital.
Dr. Wang Lifeng, the founder of the company, has led R&D personnel to collaborate with Professor Zhao Yimin’s team from the Air Force Medical University since 2013, conducting research and development of autonomous dental implant robots, successfully completing the world’s first autonomous robotic dental implant surgery in 2017. The R&D team members mainly come from the Robotics Institute of Beijing University of Aeronautics and Astronautics, Toshiba Medical, Yaskawa Robotics, and other well-known universities and enterprises, all of whom have participated in various national high-tech research development programs (86.3 Program) and the National Natural Science Foundation’s core technology research, possessing many years of experience in robotics and medical software development. The Yake Wisdom dental implant robot system has accumulated over 300 clinical surgery cases and received class III medical device registration in 2021.
8) Shanghai Panyan Robot Technology Co., Ltd.:
Shanghai Panyan Robot Medical Technology Co., Ltd. is a research and development center established in Shanghai by Nantong Robert Medical Technology Co., Ltd., committed to the independent research and development of robotic-assisted surgical systems and producing a series of surgical robots, applying key technologies to other medical surgical robot fields to build an intelligent medical robot series of products. The company holds 13 patents related to ultrasound lipolysis robots and maxillofacial surgical robots.
9) Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences:
The medical robot and biomechanics research team at the Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences, proposed a precise orthodontic diagnosis and treatment robot system based on interdisciplinary intersections of robotics, biomechanics, and orthodontics. This system consists of three modules: tissue reconstruction, treatment simulation, and robot fabrication. The system automatically reconstructs the patient’s oral tissue digital three-dimensional model based on oral CT images, facilitating diagnosis and treatment planning operations; it predicts the treatment process and results based on oral biomechanics to optimize treatment plans and appliance design; finally, it utilizes the robotic system to achieve the automatic and precise fabrication of personalized appliances.
About Jinyu Maowu
The healthcare and pharmaceutical industry is one of the core investment areas for Jinyu Maowu. The medical and pharmaceutical team has been recognized as an “Outstanding Venture Investment Team in Jiangsu Province” by the Jiangsu Provincial Development and Reform Commission for several years.
Focus areas: healthcare consumption (including aesthetics, functional skincare products, consumer devices and drugs, functional foods, etc.), pharmaceutical R&D supply chain (including CXO, life sciences support areas, pharmaceutical industrial chains, etc.), and investment in innovative medical devices (including IVDs, high-value innovative devices, etc.); digital healthcare (medical informatization, intelligent-assisted healthcare, etc.) and early-stage project investments in new drugs and treatment technologies.
Highlighted investment projects: Betta Pharmaceuticals (300957), Zhaoyan New Drug (603127), Wanbangde (002082), Nuotai Biological (688076), Shutaishen (300204), Yaoshi Technology (300725), Dihong Pharmaceutical (acquired by Bayer), Jiu Xin Medical (acquired by Dashi Intelligent), Nearshore Protein, Zhiyuan Pharmaceuticals, Xuankai Biotech, Weiqi Pharmaceuticals, and other projects.
