

Click the blue text above to follow us

📋📋📋 The contents of this article are as follows: 🎁🎁🎁
Contents
💥1 Overview
📚2 Results
🎉3 References
🌈4 MATLAB Code, Data, Articles


1 Overview
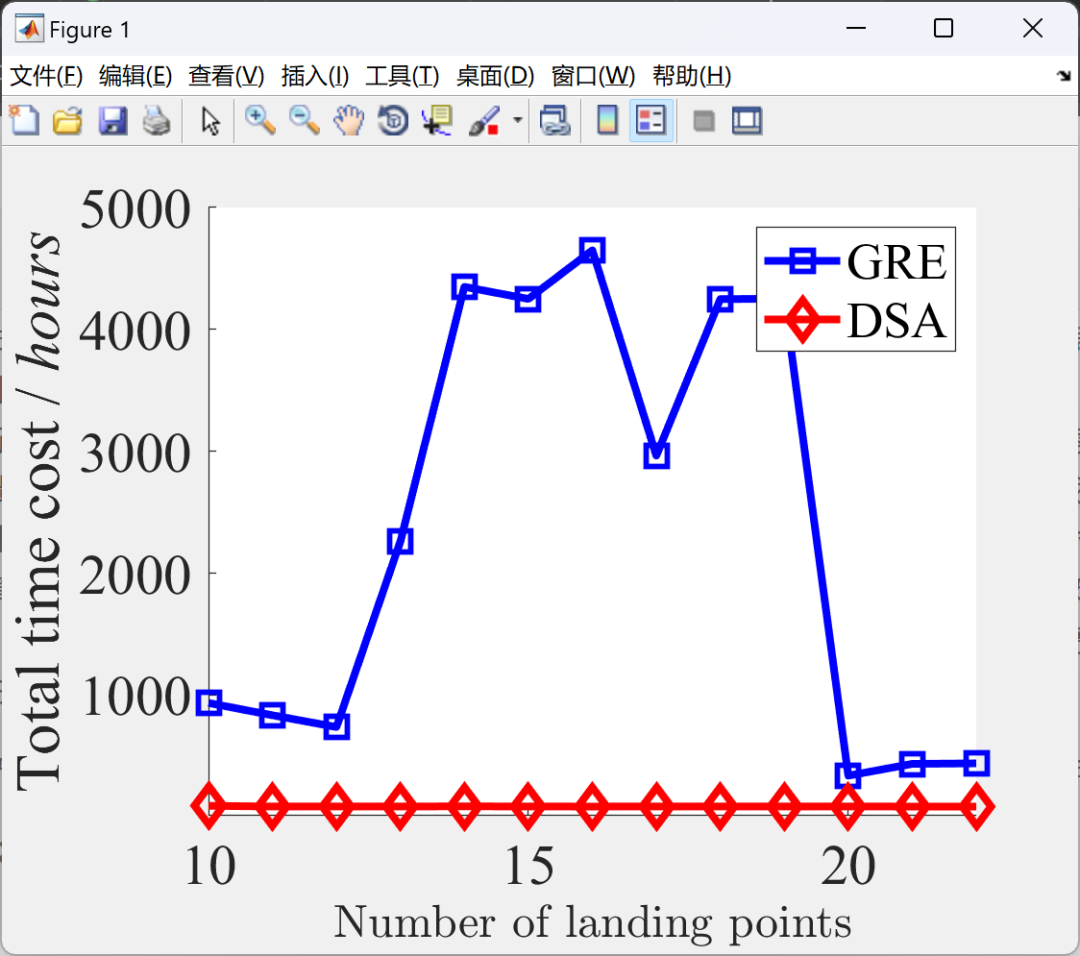
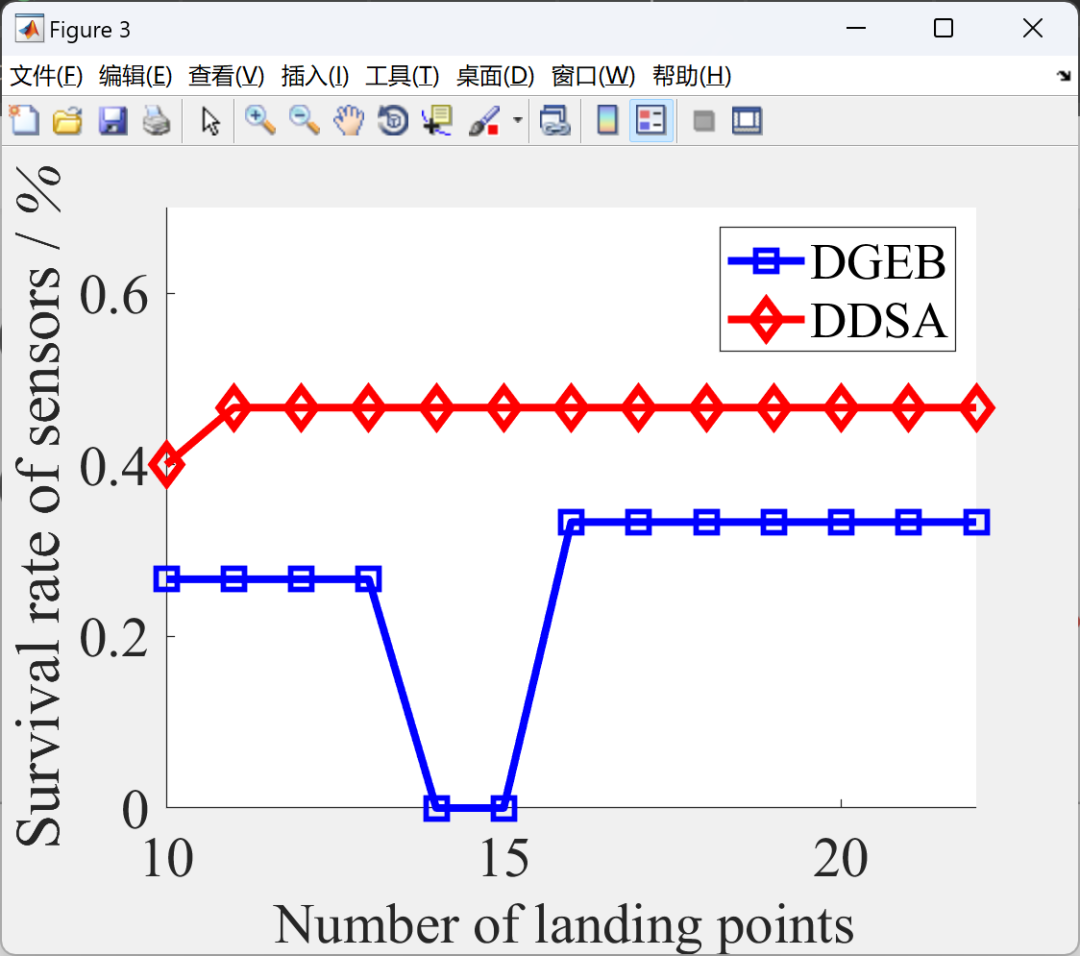
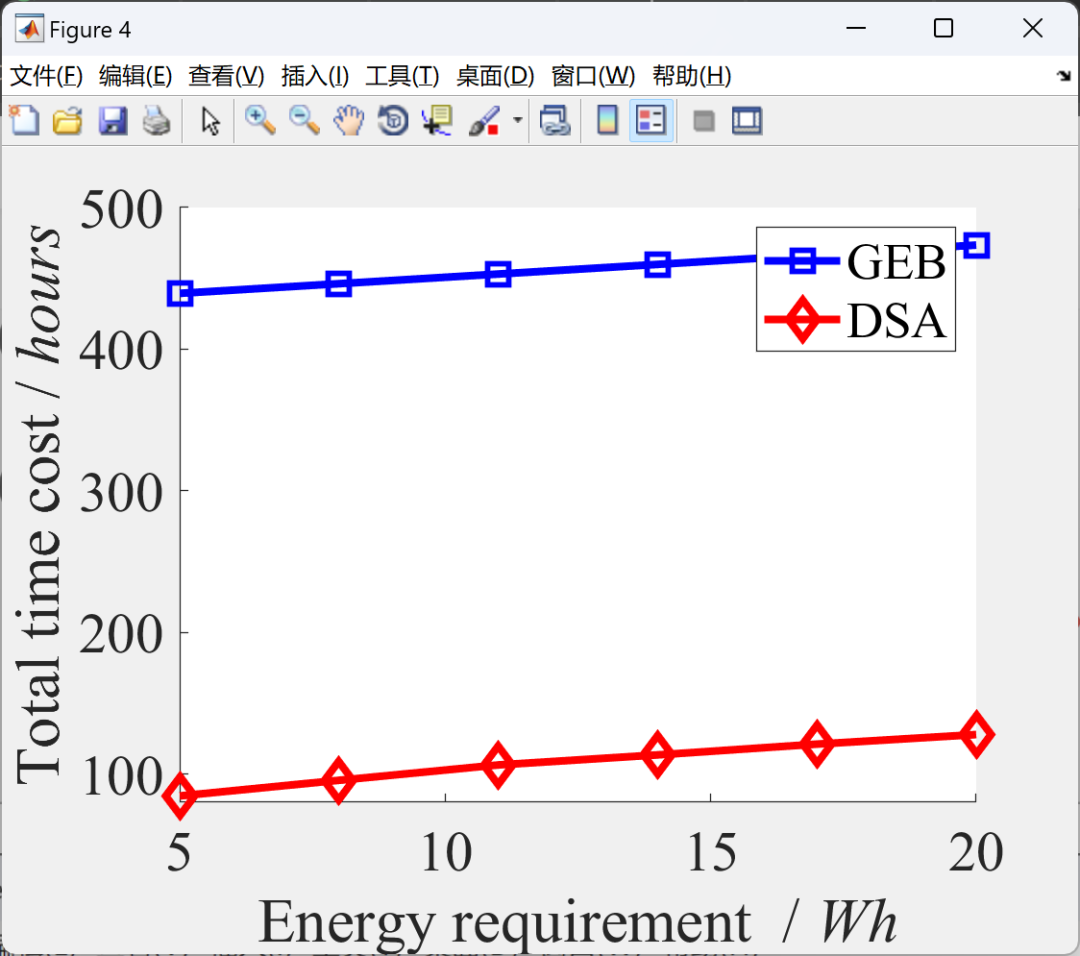
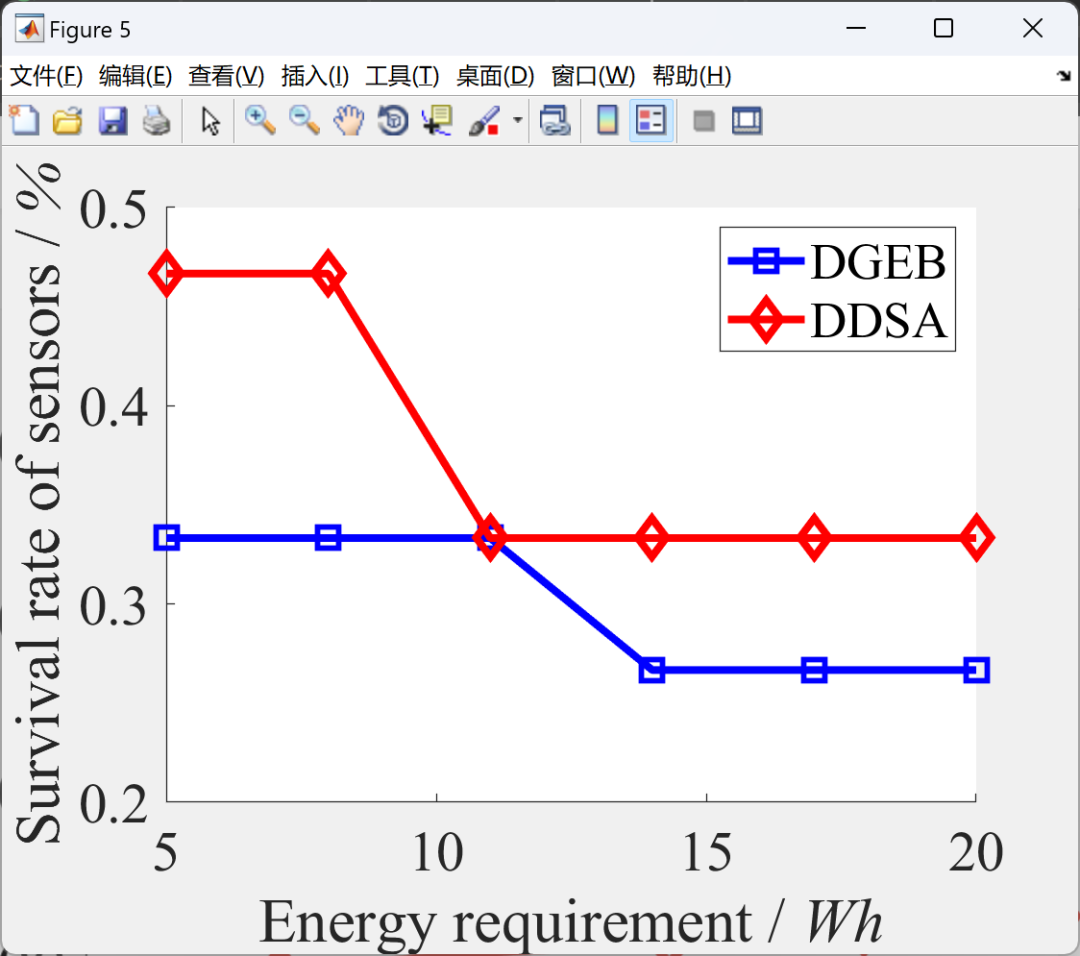
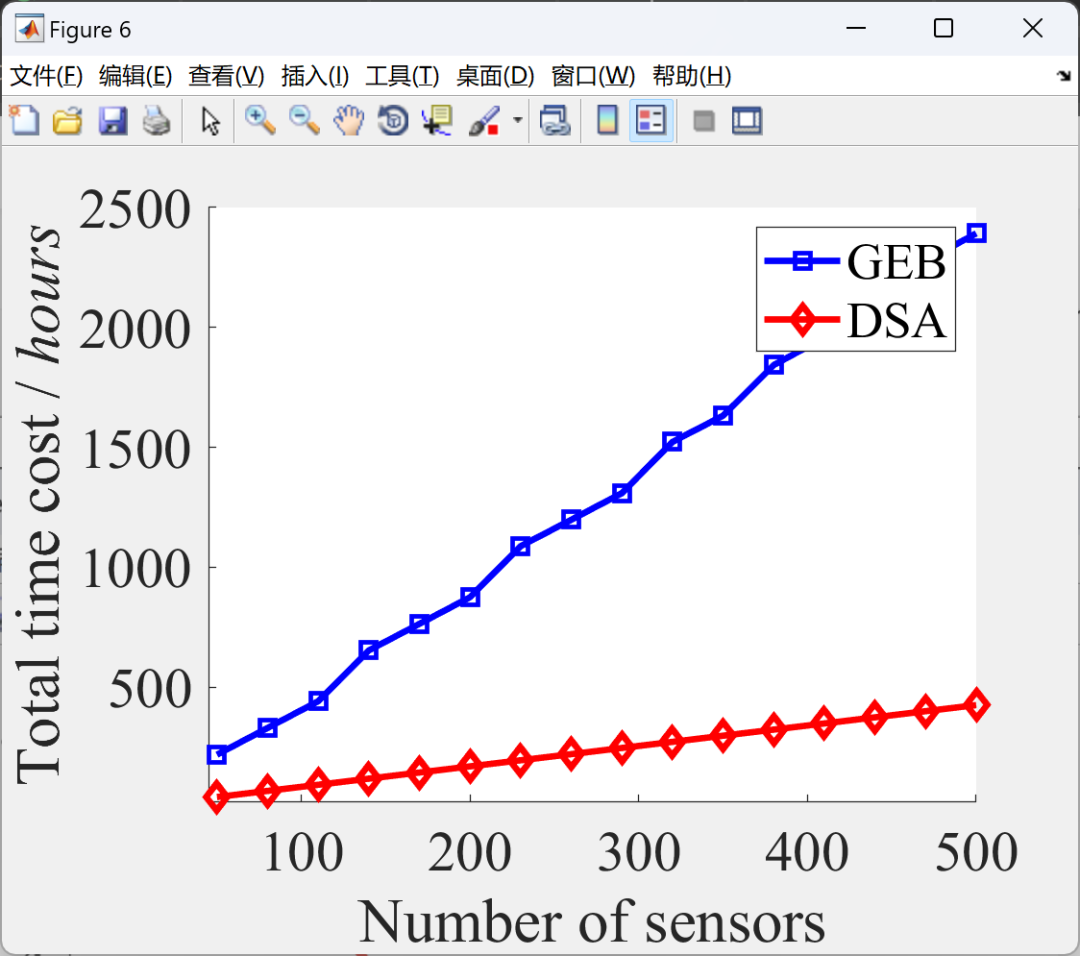
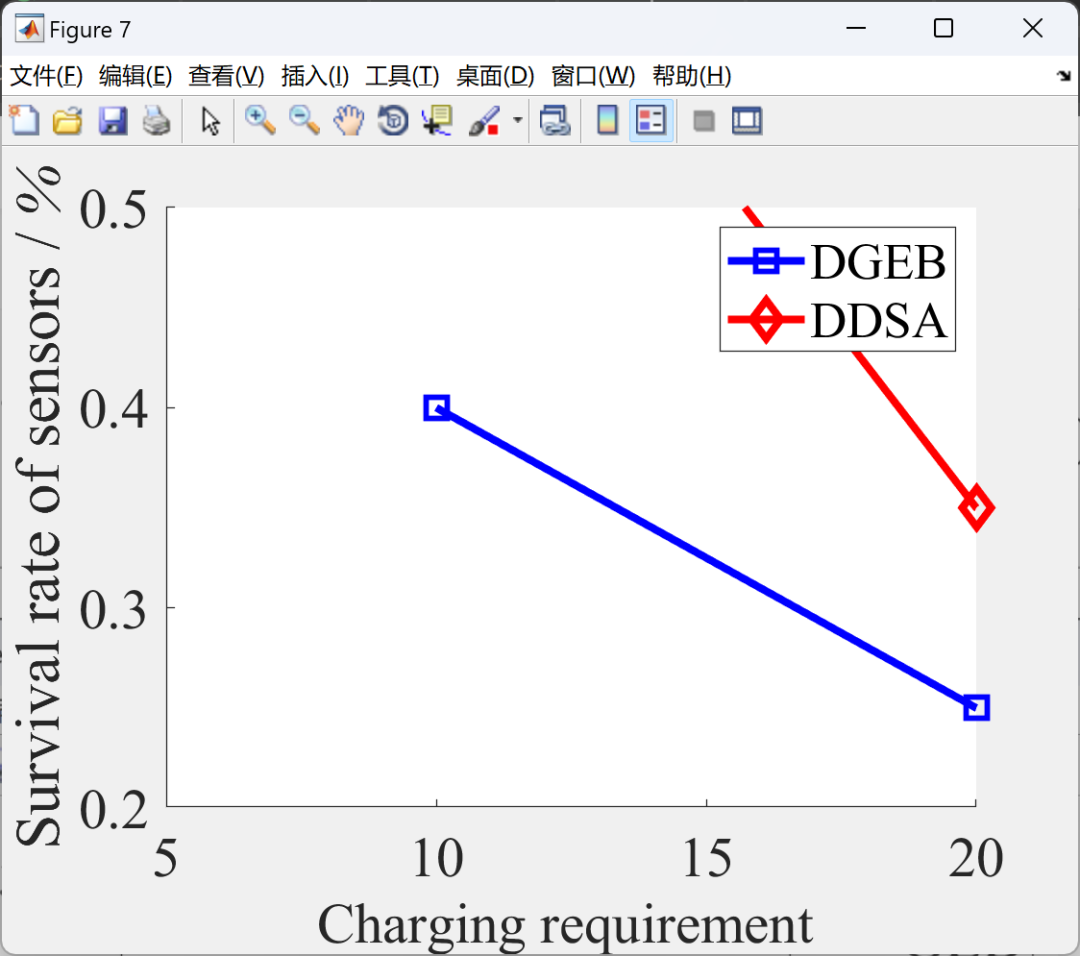
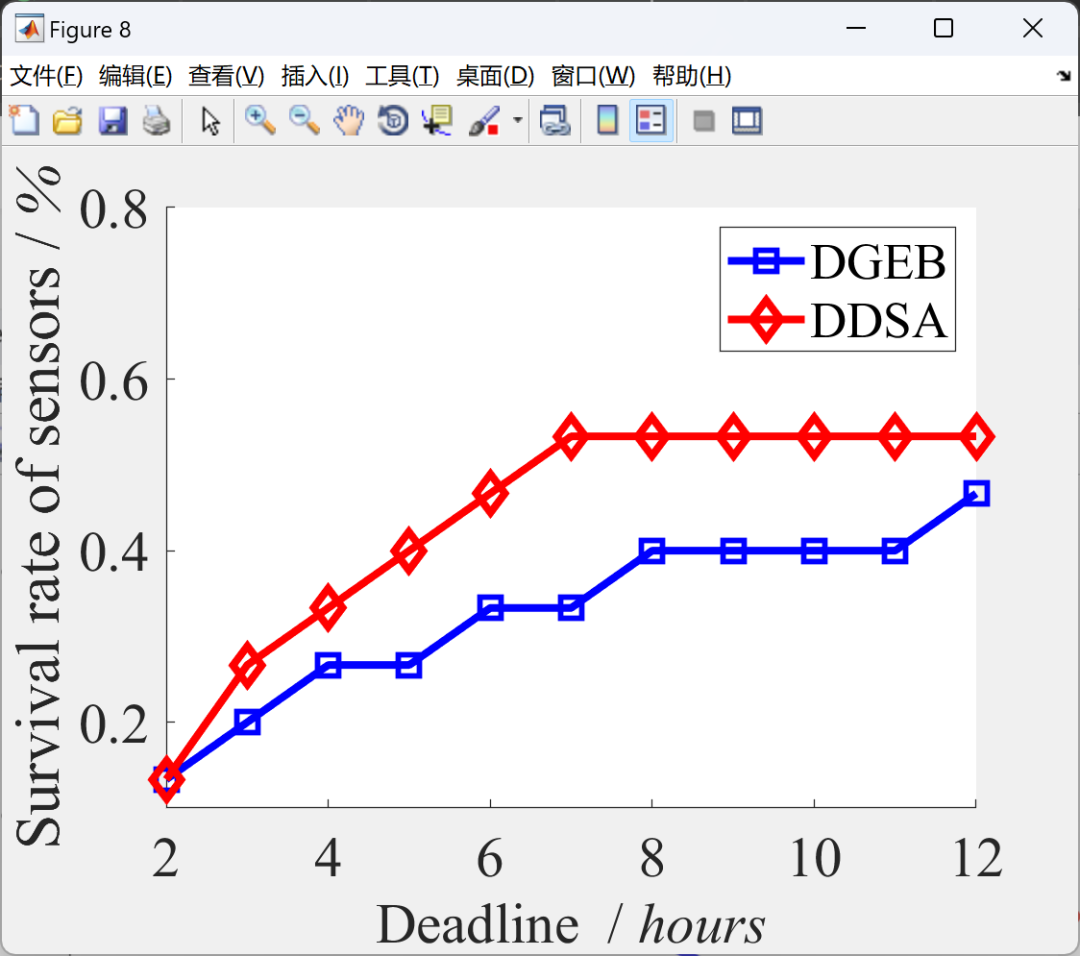
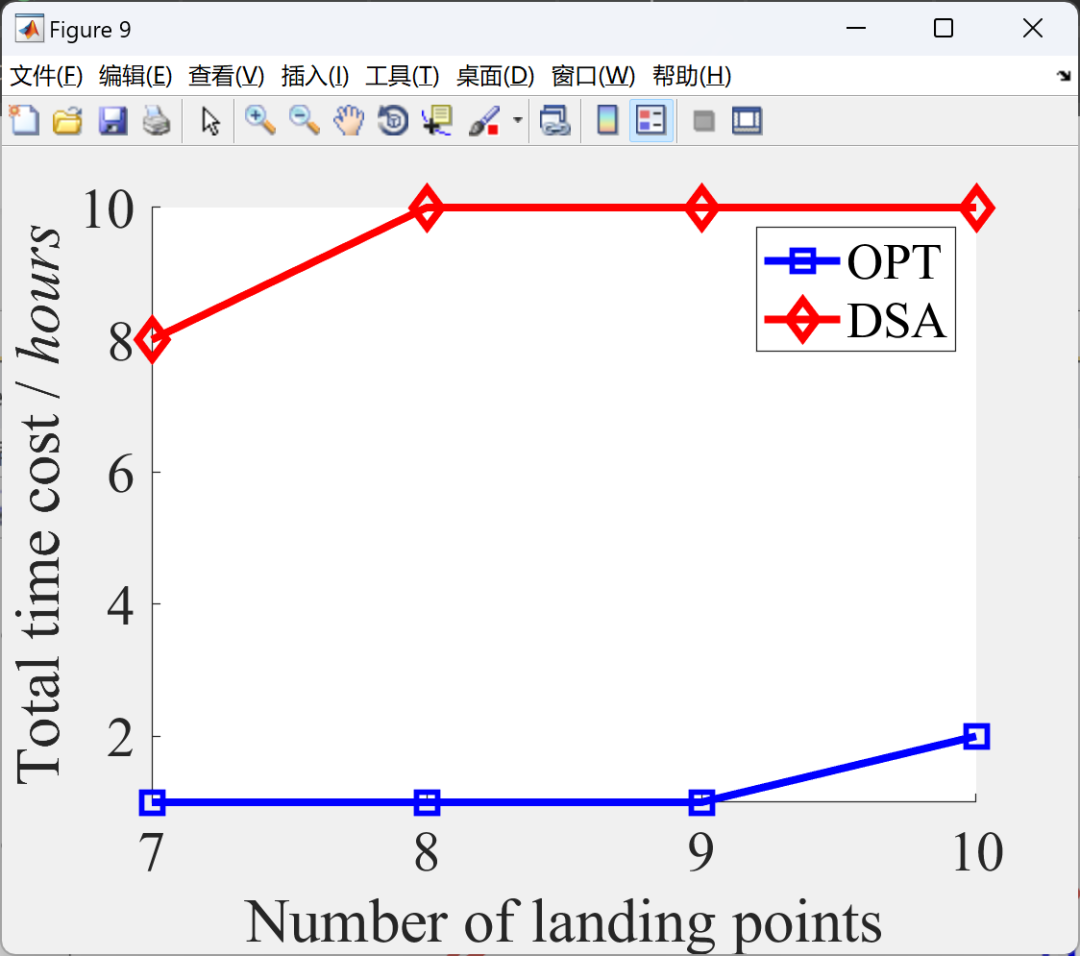
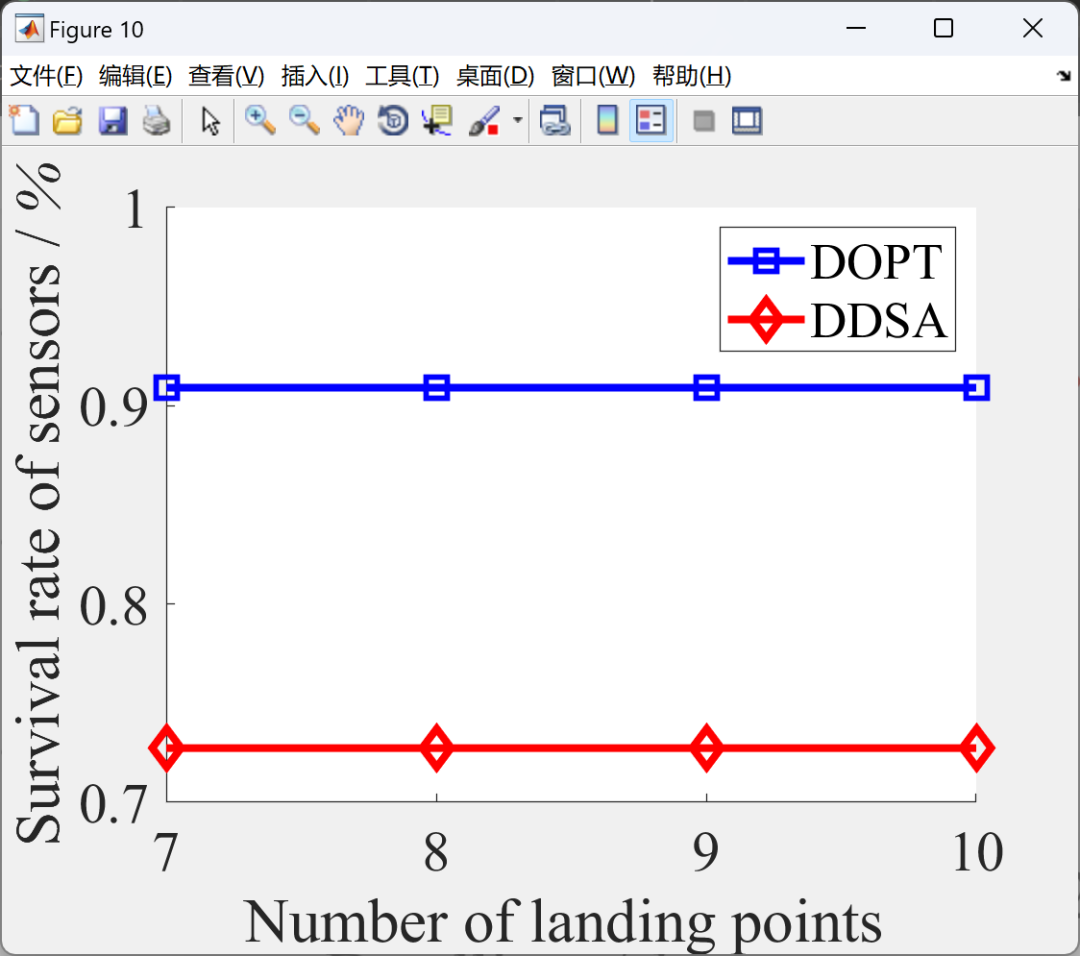
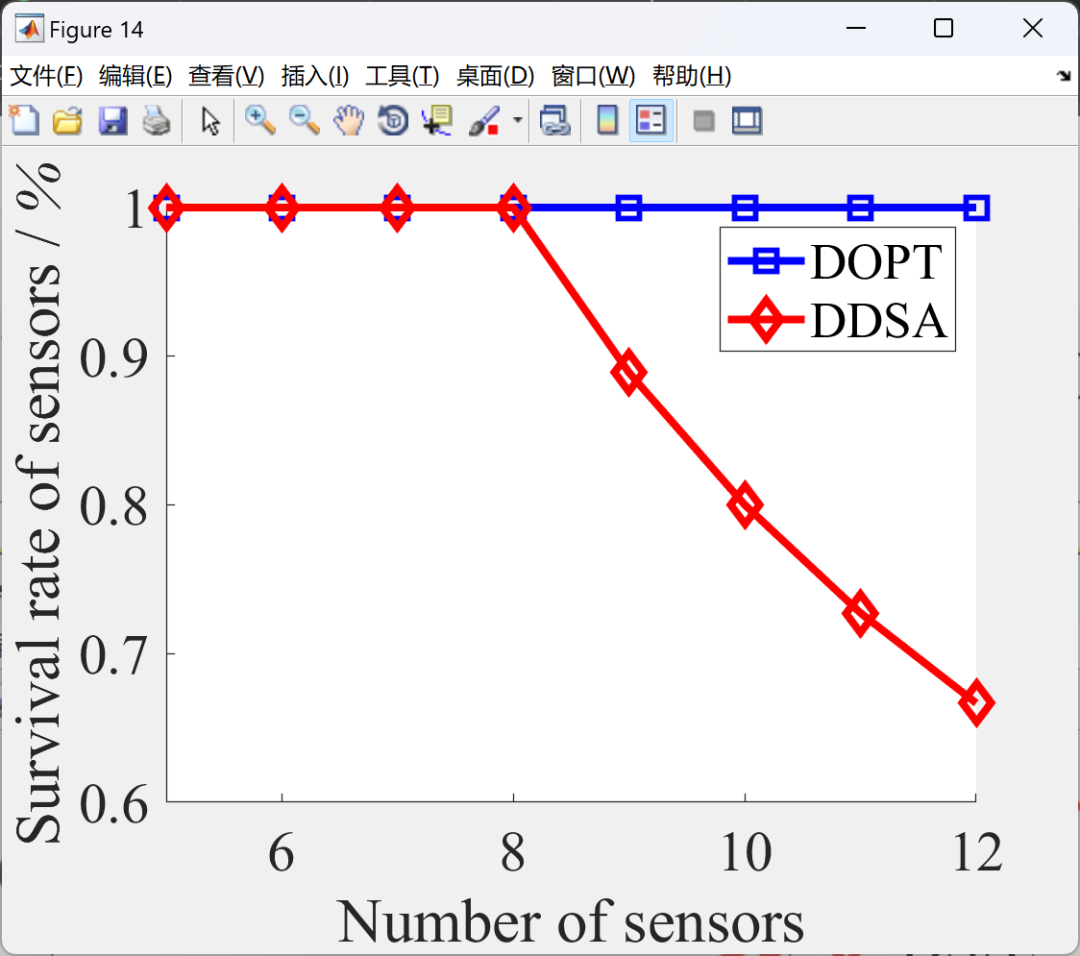
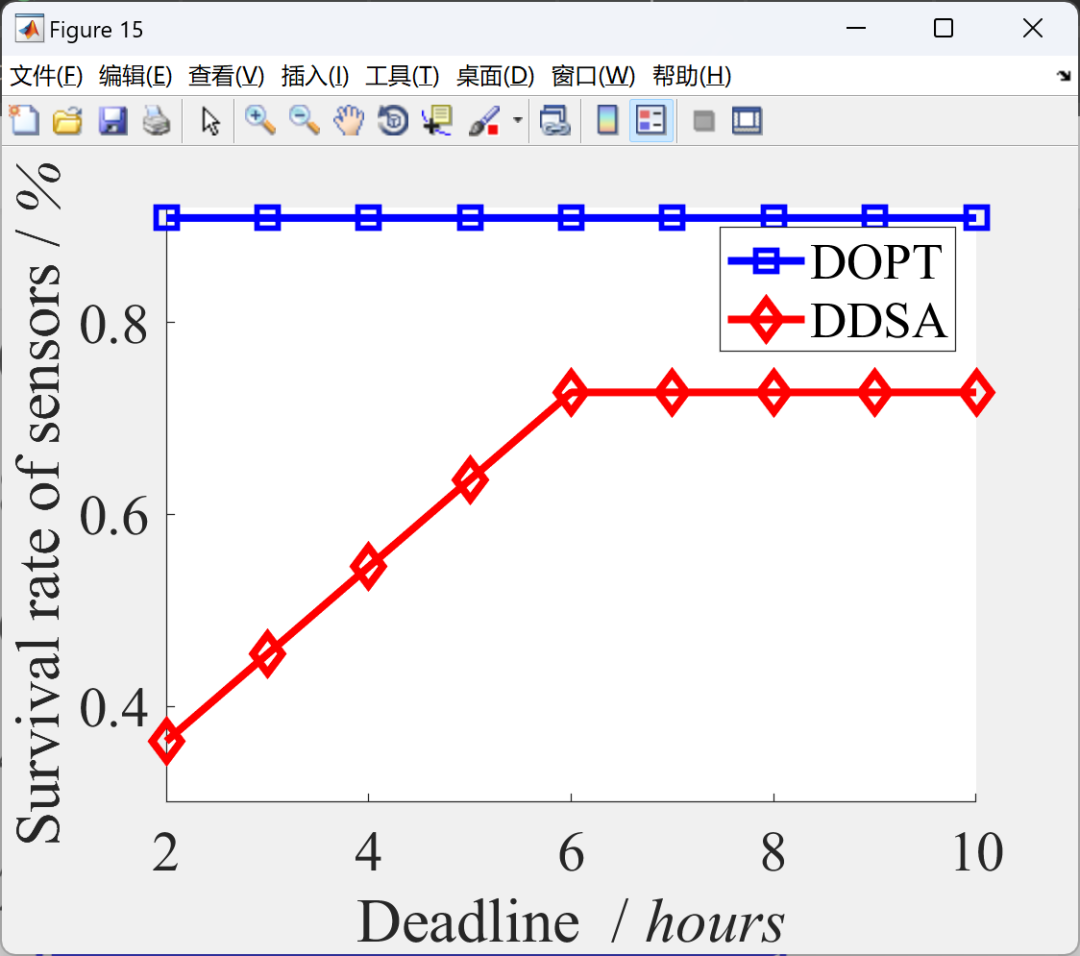
Abstract: Wireless Rechargeable Sensor Networks (WRSN) are widely used in fields such as environmental and traffic monitoring, video surveillance, and healthcare, which help improve the quality of urban life. However, deploying sensors in buildings, soil, or other places where energy is difficult to obtain from the environment poses challenges for providing sustainable energy. To solve this problem, we designed a new wireless charging system that utilizes the public transport network in urban areas to assist drone scheduling. Based on this new wireless charging system, we formulated the drone scheduling problem to minimize the total time cost of the drones while ensuring that they can charge all sensors under energy constraints. We then proposed an approximation algorithm, DSA, to solve the energy-constrained drone scheduling problem. To ensure the sustainability of WRSN tasks, we further formulated the drone scheduling problem with sensor deadlines and proposed the approximation algorithm, DDSA, to maximize the number of sensors charged by drones before the deadline. Through extensive simulations, we demonstrated that DSA can reduce the total time cost by 84.83% compared to the greedy energy replenishment algorithm, and the average total time cost used is at most 5.98 times that of the optimal solution. We also showed that DDSA can improve the sensor survival rate by 51.95% compared to the greedy energy replenishment algorithm with deadlines, and it can achieve an average survival rate of 77.54% of the optimal solution.
Keywords: Wireless Rechargeable Sensor Networks, Public Transport Network, Drone Scheduling, Traveling Salesman Problem, Submodular Optimization Problem


2 Results
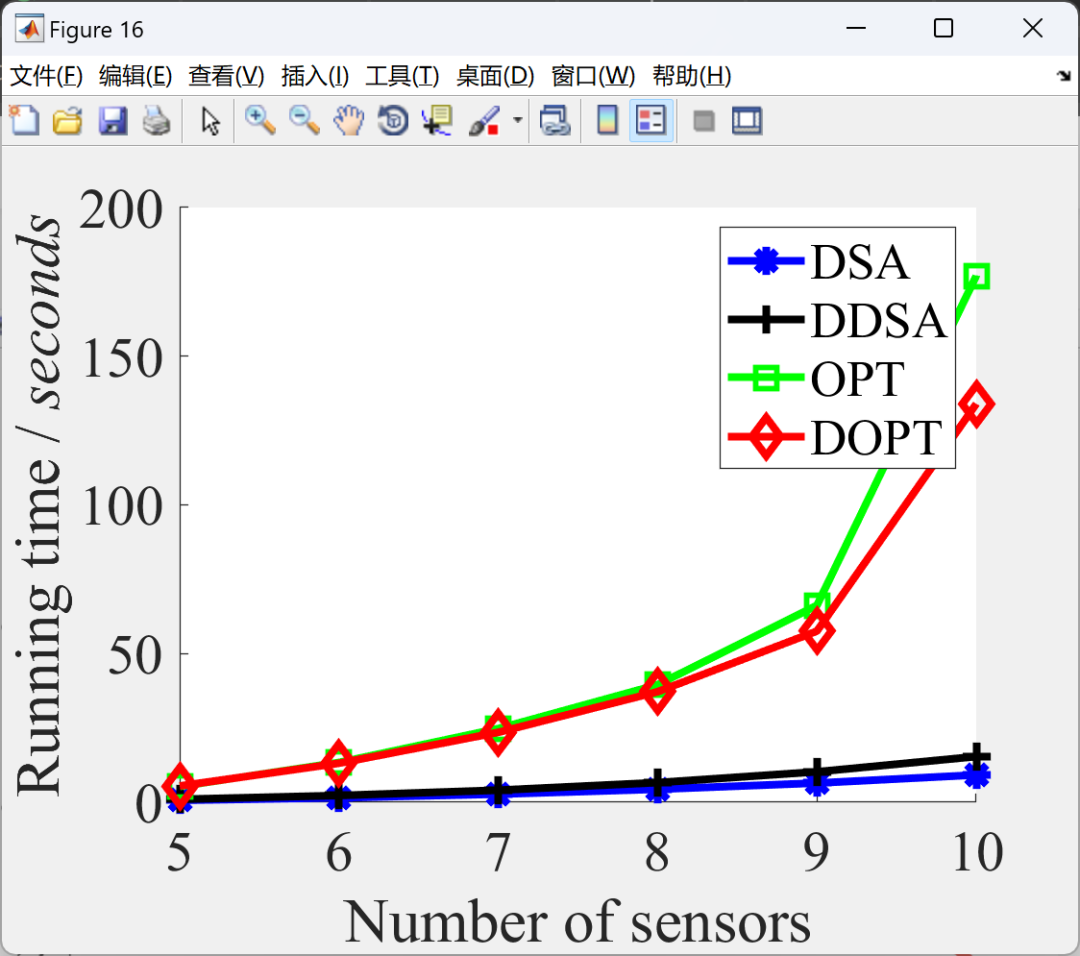
部分代码:%主函数tic%U=5;%传感器的充电请求whdistance_sl=10;%统一设置传感器与其最近起落点的距离为20kmdis_G=load('G.txt');%由landing points以及它们的边构成的无向图,权值是距离kmn_lpmax=length(dis_G);%起落点的个数%fid=fopen('C:\codes\Figure12\b\result\6.txt','a');fid=fopen('/code/Figure12/b/result/6.txt','a');%%%%%%%%%%%%%%phase 1, construct undirected graph Gn_lp=n_lpmax-2;%传感器的个数tao=6;n_sensor=11; G1=zeros(n_sensor,n_sensor);for U=5:3:20[Gt,Gc,dis_SL]=construct1(n_sensor,distance_sl,n_lp);%%%%%%%%%%%%%第二阶段:求解两个传感器之间的满足能量约束的最短路和构造有向图G1for i=1:n_sensor for j=1:n_sensor if i==j G1(i,j)=0; else G1(i,j)=energy_sp(i,j,Gt,Gc,dis_SL,U,distance_sl,n_lp);%返回传感器i与传感器j之间路径的时间 end endend%%%%%%%%%%%%%%%第三阶段:求解ATSPP问题final_srs= allpath(G1,n_sensor,tao);disp('输出DOPT算法的最终解');fprintf(fid,'%d %7.4f\r\n ',U,final_srs);endfclose(fid);disp('输出DOPT算法的运行时间');toc
3References
3References
Some content in this article is sourced from the internet and will be cited or referenced. If there are any issues, please feel free to contact us for deletion.


4 MATLAB Code, Data, Articles

