Smart sailing, creating the future together
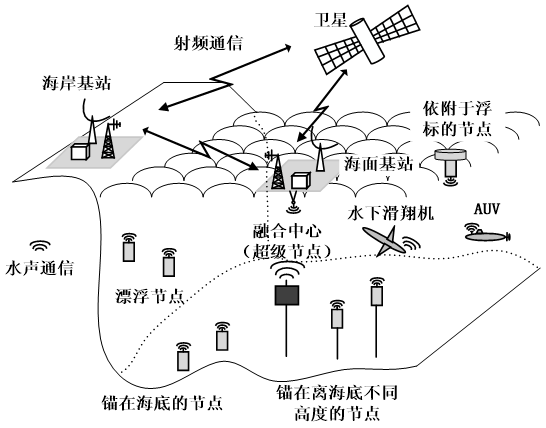
Underwater Sensor Networks refer to: Broadly defined, Underwater Sensor Networks (USNs) mainly include various parts such as integrated sensor nodes with different functions, fusion centers, autonomous underwater vehicles, underwater gliders, surface base stations, and coastal base stations.
Liu Meiqin, Han Xueyan, Zhang Senlin, Zheng Ronghao, Lan Jian. Current Status and Prospects of Target Tracking Technology Based on Underwater Sensor Networks. Acta Automatica Sinica, 2021, 47(2): 235−251
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190886?viewType=HTML
System Composition of USNs
The ocean contains rich natural resources, which are not only an important strategic space for human survival and sustainable development but also a crucial protective barrier for national security. In recent years, with the increasing competition over territorial sovereignty and marine resource development between China and neighboring countries, underwater target tracking technology, as an important research direction in marine science and technology, has played a vital role in both military and civilian fields. For example:
(1) Military Field: By quickly acquiring enemy targets’ location, speed, acceleration, and other state information, it can effectively defend against and strike enemy intruding ships, torpedoes, submarines, and underwater robots.
(2) Civilian Field: It plays an important role in underwater target search and rescue, intelligent control of underwater robots, and protection of marine biological resources.
Underwater target tracking refers to the use of one or more sensors of different types to obtain various measurement information (distance, direction, etc.) and continuously estimate and predict the target’s state (speed, position, etc.) over time through filtering algorithms. Traditional underwater target tracking technologies mainly include sonar image-based tracking and sonar array-based tracking. Sonar image-based tracking can obtain information about the target’s location, speed, and other motion information, and the video and image information obtained through sonar imaging can provide visual information about the target, such as shape, texture, and boundaries. However, it is greatly affected by environmental factors in the water, leading to very limited application scenarios. The tracking range and working time of sonar array-based tracking are limited by the ship’s activity range and time, and once the ship malfunctions or is attacked, the entire system will be unable to continue the tracking task.
In recent years, the research and application of USNs and related technologies have also sparked a wave of interest worldwide. USNs not only have advantages such as low cost, self-organizing structure, strong fault tolerance, strong concealment, and rapid deployment but also adopt a distributed deployment approach, allowing for real-time, continuous, all-weather acquisition of multi-dimensional, complementary target measurement information, making target detection and tracking no longer constrained by space and time. Through information sharing and collaborative work among various nodes, USNs can also achieve high target tracking accuracy. The underwater target tracking based on USNs mainly has the following advantages:
(1) The tracking system is more reliable;
(2) The tracking range is broader;
(3) Tracking is timelier;
(4) Tracking accuracy is higher;
However, due to the complex and variable underwater environment, the underwater target tracking technology based on USNs also faces many challenges, such as high communication delay, limited communication bandwidth, severe clutter and multipath effects, measurement loss, and limited energy resources in the network. Although the target tracking technology for land-based WSNs has become quite mature, considering the particularity of USNs, land-based tracking algorithms cannot be directly applied to USNs. Therefore, researching underwater target tracking algorithms that fit the characteristics of USNs has extremely important application value and strategic significance.
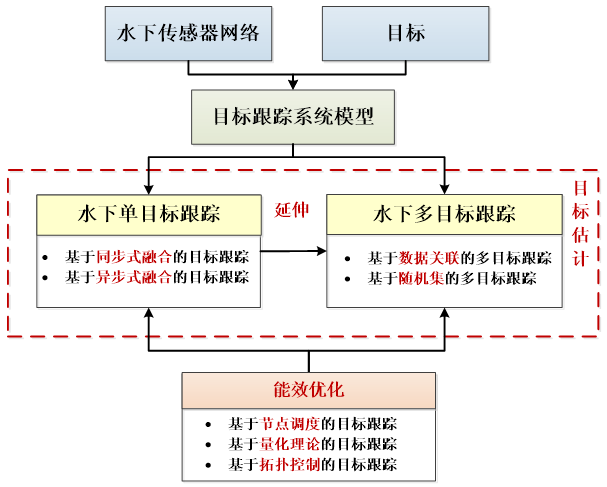
This paper reviews the underwater target tracking technology based on USNs, elaborating from several perspectives: underwater sensor networks, underwater target tracking models, underwater single target tracking technology, underwater multi-target tracking technology, and high-energy efficiency measures in underwater target tracking:
(1) Briefly introduces the construction overview of USNs hardware platforms and their system composition and classification;
(2) Introduces the construction of underwater target motion models and measurement models and the impact of the environment on model construction;
(3) Discusses single target tracking technology based on USNs from the perspectives of synchronous fusion and distributed fusion, comparing the advantages and disadvantages of the two fusion methods;
(4) Again discusses in detail the application of data association and random finite set methods in multi-target tracking based on USNs and the problems that exist;
(5) In response to the energy consumption issues faced by USNs, it reviews existing energy efficiency optimization measures and summarizes the basic principles, applicability, and existing problems of various methods;
(6) Finally, it points out the challenges currently faced by target tracking based on USNs and prospects for future development directions.
Underwater Target Tracking Technology Based on USNs
Liu Meiqin
Professor at the National Key Laboratory of Industrial Control Technology and the School of Electrical Engineering, Zhejiang University. Main research directions are artificial intelligence theory and applications, marine information technology, information fusion, nonlinear control theory and applications.
E-mail: [email protected]
Han Xueyan
Doctoral student at the School of Electrical Engineering, Zhejiang University. Main research directions are target tracking, multi-sensor networks, information fusion, and direction estimation.
E-mail: [email protected]
Zhang Senlin
Professor at the School of Electrical Engineering, Zhejiang University. Main research directions are underwater wireless sensor networks, information fusion, and textile automation.
E-mail: [email protected]
Zheng Ronghao
Associate Professor at the School of Electrical Engineering, Zhejiang University. Main research directions are multi-robot systems, cooperative control and optimization, and marine information technology.
E-mail: [email protected]
Lan Jian
Professor at the School of Automation Science and Engineering, Xi’an Jiaotong University. Main research direction is information fusion theory and technology.
E-mail: [email protected]
Source: Acta Automatica Sinica
Editor-in-chief: Kou Ying
[CAA Award Ceremony] Notice on the 2020 Annual Award Ceremony of the Chinese Association of Automation
[Discipline Construction] Tall trees grow high, nutrition is in the roots – The Chinese Association of Automation supports the development of automation science and technology
[Important Notice] Notice on soliciting hosting units for cutting-edge seminars in intelligent automation disciplines
[Heavyweight] With craftsmanship for 60 years, wisdom leads to a new future – The collection of logos and mascots for the 60th anniversary of the Chinese Association of Automation begins!
[Cloud Lecture Collection] Spring returns to the earth, everything is renewed, CAA invites you to gather again in the “cloud” – The 2021 “CAA Cloud Lecture” speaker collection begins!
Address: 95 Zhongguancun East Road, Haidian District, Beijing
Postal Code: 100190
Phone: 010-82544542 (General)
010-62522472 (Membership)
010-62522248 (Academic Activities)
010-62624980 (Finance)
Fax: 010-62522248
Email: [email protected]
New Media Matrix of the Chinese Association of Automation
Official WeChat of the Association
Official Website of the Association
Official Bilibili of the Association
Official Douyin of the Association
Official Weibo of the Association
Official iQIYI of the Association
Chinese Association of Automation Meetings
Chinese Automation Conference
Tencent Micro Vision Account
Read the original text to learn more