Code Link:
Project Homepage:
Due to the rich content of the LoRA-Dash paper, compressing 30 pages of content into 10 pages is a highly challenging task. Therefore, we have made careful trade-offs between readability and content integrity. The starting point of this article may differ from the original paper, aligning more closely with our initial motivations and goals.

Research Motivation
1.1 Top, Bottom, or Random?
-
PISSA: suggests that the matrices A and B in LoRA initialization should correspond to the maximum singular value part of the weight matrix W.
-
MiLORA: proposes that the A and B in LoRA initialization should reflect the minimum singular value part of W.
In addition, some methods suggest adjusting the maximum singular direction of the weight matrix W, such as Spectral Adapter, or randomly selecting singular directions for adjustment, like RoSA. In each related paper, the authors claim their method performs the best and demonstrate through ablation experiments that the singular parts they identify should be adjusted.
This is quite interesting. From a paper writing perspective, the authors need to maintain logical consistency, ensuring that the useful parts they emphasize are validated in the ablation experiments. However, the confusion arises from the fact that there should not be such significant differences between these methods. The results of each study seem to support different strategies for adjusting singular directions, which complicates the issue further. This suggests that how to effectively select and adjust singular directions remains a controversial and not fully resolved key issue.
Given this, let us take an observer’s perspective and simply analyze which parts may be more useful in LoRA initialization. Intuitively, top singular directions indeed contain the most useful information learned by the model during the pre-training process. The purpose of fine-tuning is to leverage this knowledge gained during pre-training. Therefore, directly adjusting these important singular directions may disrupt the effectiveness of this information, leading to poor fine-tuning results.
I have personally found this in my experiments: adjusting top singular directions usually does not yield significant performance gains and can sometimes even negatively impact model performance. This indicates that preserving the structure of these directions during fine-tuning may be more important than over-adjusting them. Thus, exploring other methods of adjusting singular directions may be a more effective strategy.
Let’s focus on fine-tuning randomly selected singular vectors and bottom singular vectors. Logically, I agree that fine-tuning bottom singular vectors seems more reasonable.
Firstly, bottom singular vectors usually represent less important or secondary information learned by the model during pre-training. Therefore, fine-tuning these vectors will not interfere with the key information captured by the model during pre-training. This helps preserve the core knowledge gained during pre-training.
Secondly, by fine-tuning these less important parts, we can transform “useless into useful,” allowing these vectors to play a role in downstream tasks, capturing information relevant to specific tasks.
This strategy can add new, targeted information to the task while maintaining the core capabilities of the pre-trained model. Thus, fine-tuning bottom singular vectors may theoretically be an effective way to retain existing knowledge while introducing task-related adjustments. In contrast, the method of randomly selecting singular vectors, while exploratory, may not be as stable or targeted as fine-tuning bottom singular vectors.
However, I vaguely recall that I have seen these analyses in LoRA.
1.2 Review of LoRA
Upon rereading Section 7 of LoRA, I found some content that validates the above analysis. For instance, LoRA points out that the role of is to expand the unimportant directions in the weight matrix W. This further proves that during fine-tuning, top singular vectors should not be chosen for adjustment.
At the same time, LoRA demonstrates through extensive experiments that the content truly learned during fine-tuning is task-specific directions (TSD), which are crucial for downstream tasks. Therefore, our focus of adjustment should be on TSD, rather than top, bottom, or random singular vectors.
However, there are some contradictions in LoRA’s description of TSD. For example, LoRA states that TSD are singular directions of the weight matrix , while also defining TSD as . Moreover, LoRA believes that TSD may include some task-irrelevant directions, although this statement seems somewhat contradictory and absurd.
These inconsistencies have prompted us to think further. We believe the root of the problem lies in the unclear definition of TSD—there are actually ambiguities in the fundamental definitions of the entire framework (such as matrix directions, etc.). Therefore, we decided to redefine a clearer framework from scratch as the cornerstone of TSD theory and build a complete TSD system on this basis.

Building a Framework for Task-Specific Directions from Scratch
2.1 Definition of TSD
Definition 1: For a matrix , its left singular vectors and right singular vectors are represented by matrices and , respectively. The basis of matrix is defined as follows: Core basis: The core basis of matrix is defined as , where each is a rank-1 matrix constructed from the singular vectors and . Global basis: The global basis of matrix is defined as for all , covering all combinations of left and right singular vectors.
Definition 2: The direction of the matrix (where ) is based on its global basis definition, using an extended set of its singular values , filled with zeros, specifically represented as , i.e., flattened through rows.
Definition 3: The definition of is the projection of a direction in one coordinate system onto another coordinate system. In particular, is the projection of the direction of matrix onto the global basis of matrix .

Therefore, we can define TSD as:
Definition of TSD: For a specific task and pre-trained weight matrix , assuming the optimal weight for that task is , then the task-specific direction (TSD) for that task on refers to those core directions that exhibit a significantly high change rate during the transition from to .
From the definition of TSD, we can directly draw the following conclusions:
-
TSD is a subset of core directions of the pre-trained weight W. They are task-relevant, meaning that TSD varies across different tasks but remains fixed for a particular task.
-
Core directions associated with larger singular values are less likely to be identified as TSD because their coordinate change rates are usually smaller than those associated with smaller singular values.
2.2 Properties of TSD
We assume that through full fine-tuning, we can obtain optimal weight, , by fully fine-tuning LLaMA-7B on commonsense reasoning tasks, we ultimately calculate the change rates for each direction, as shown in the figure below:

Firstly, the left side of the graph shows the change rate for each direction, with the horizontal axis representing the index of singular values, which decreases as the index increases. It is evident from the graph that directions with larger change rates are mostly concentrated at smaller singular value index positions.
However, the middle graph indicates that smaller singular values do not always accompany larger change rates, suggesting that the relationship between change rate and singular value size is not a simple linear one. The rightmost graph ranks the change rates of all directions from largest to smallest, clearly showing that TSD occupies only a very small number of directions, while most directions have negligible change rates. This indicates that during fine-tuning, only a few directions have a significant impact on the task, while the change rates of most directions can be virtually ignored. Therefore, we can draw two properties of TSD:
-
TSD primarily corresponds to core directions associated with smaller but not minimal singular values. -
TSD encompasses only a few directions, which exhibit significant change rates during the transition from to , while the change rates of most other core directions are small or negligible.

2.3 Challenges of Using TSD
Despite our in-depth exploration of the definition and properties of TSD, a significant challenge lies in the fact that prior to fine-tuning, both and are unknown, meaning that it is nearly impossible to utilize TSD information in practical fine-tuning scenarios ahead of time.
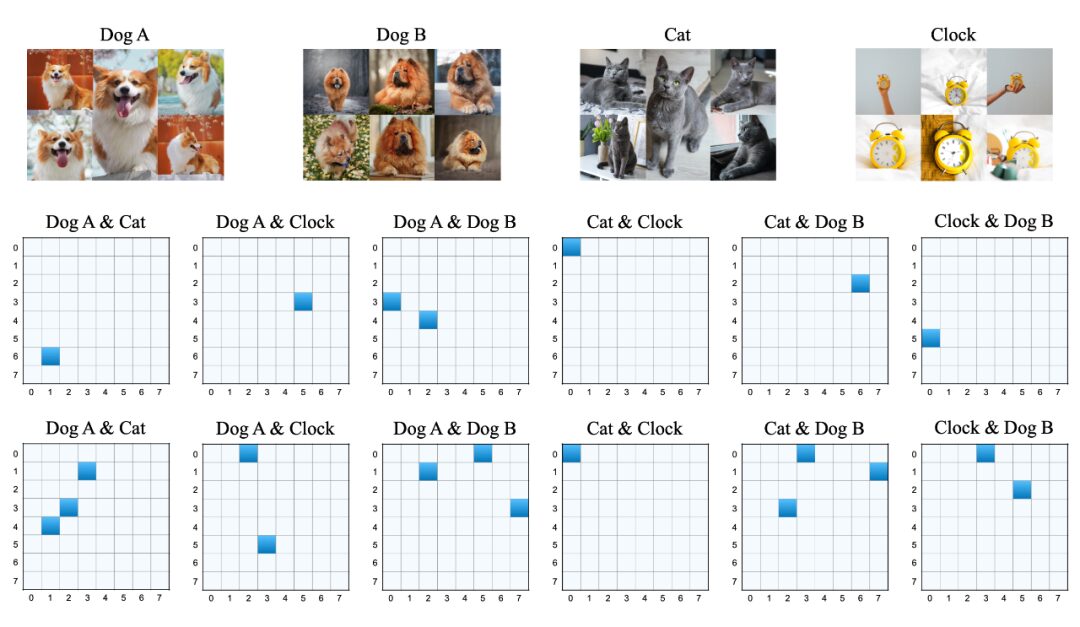
Despite this apparent challenge, we did not stop there but rather placed our hopes on . We hypothesize that the core directions with the highest change rates predicted by LoRA in are closely related to TSD. To validate this hypothesis, we conducted two types of experiments.
First, we wanted to know whether the top 8 directions predicted based on included the top 4 directions with the highest change rates in TSD; we called this metric recall. We also wanted to know whether the top 8 directions predicted based on all fell within the top 16 directions with the highest change rates in TSD; we called this metric accuracy. The experimental results are shown in the figure below:
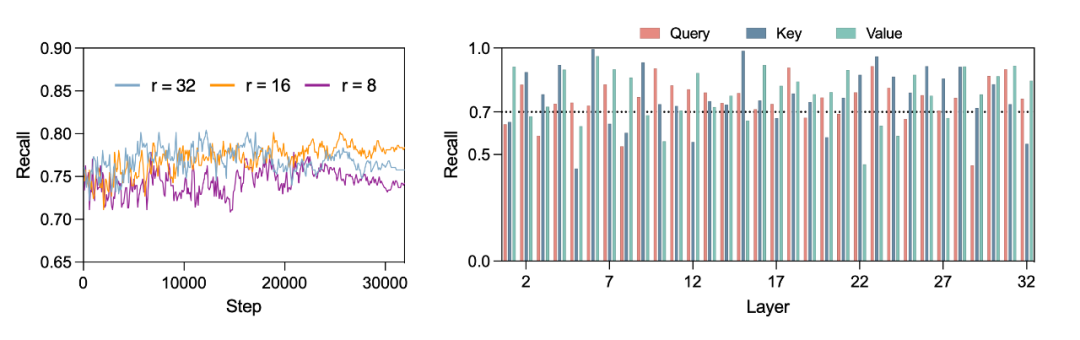
For example, regarding accuracy: during the LoRA fine-tuning process, we tracked the accuracy of the predicted directions in the query, key, and value layers of the LLaMA-7B model every 100 training steps, analyzing the continuously updated ability to capture TSD.
The left graph displays the average accuracy across all query, key, and value layers, showing the model’s ability to maintain task-specific knowledge at each training step. Under different LoRA rank settings, these accuracies consistently exceed 0.75, indicating that can reliably capture and integrate TSD information.
The right graph calculates the average accuracy of each query, key, and value layer across all training steps for the case where the rank setting is r=32, revealing their sensitivity to TSD. The average accuracy of most layers remains above 0.75, demonstrating their robustness in capturing TSD information.
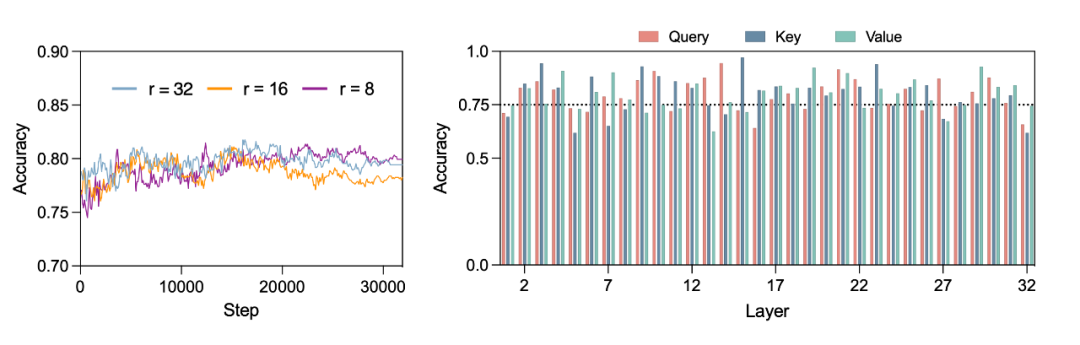
This indicates that can not only capture the parts with the highest change rates in TSD, but also that the directions it captures are overall among the top change rates of TSD. This leads to an important conclusion:
Regardless of the rank settings of LoRA, training steps, or specific layers in the model, can always capture information about task-specific directions (TSD).
This conclusion is exciting, indicating that even without prior knowledge of TSD, we can still capture these key task-specific information through the obtained during the LoRA training process.

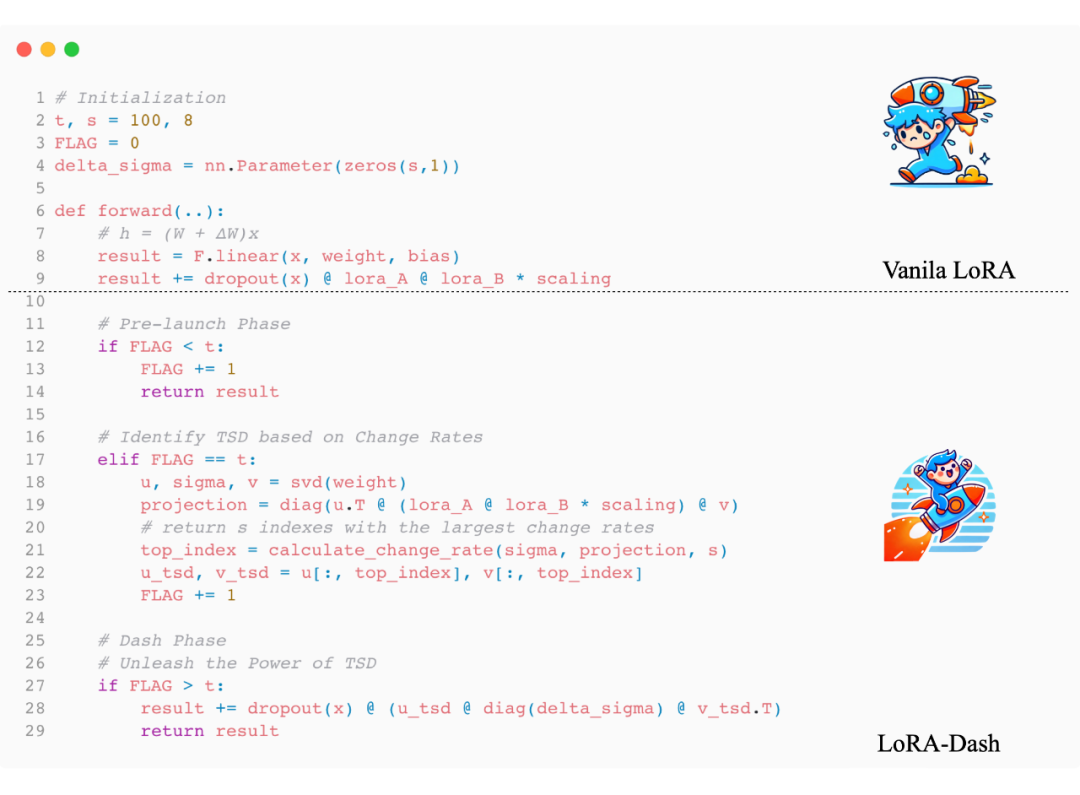
LoRA-Dash: Further Unlocking the Potential of TSD
To accelerate learning efficiency in TSD directions and alleviate the learning burden of , we propose a new method—LoRA-Dash. This method aims to capture task-specific directions more efficiently, thereby enhancing the speed and effectiveness of the fine-tuning process.
LoRA-Dash consists of two main stages:
-
“Pre-Launch Stage”: In this stage, TSD is identified, which is a key part of model optimization, ensuring that the most needed directions for adjustment are found. Specifically, LoRA-Dash utilizes the obtained after updates to predict TSD and determine the directions that need optimization in the next stage.
-
“Sprint Stage”: In this stage, the model fully utilizes the previously identified TSD for fine-tuning optimization, allowing the pre-trained model to better adapt to specific tasks. Specifically, LoRA-Dash directly simulates the coordinate changes of TSD, accelerating the model’s adaptive adjustments in new tasks, thereby significantly improving its performance.

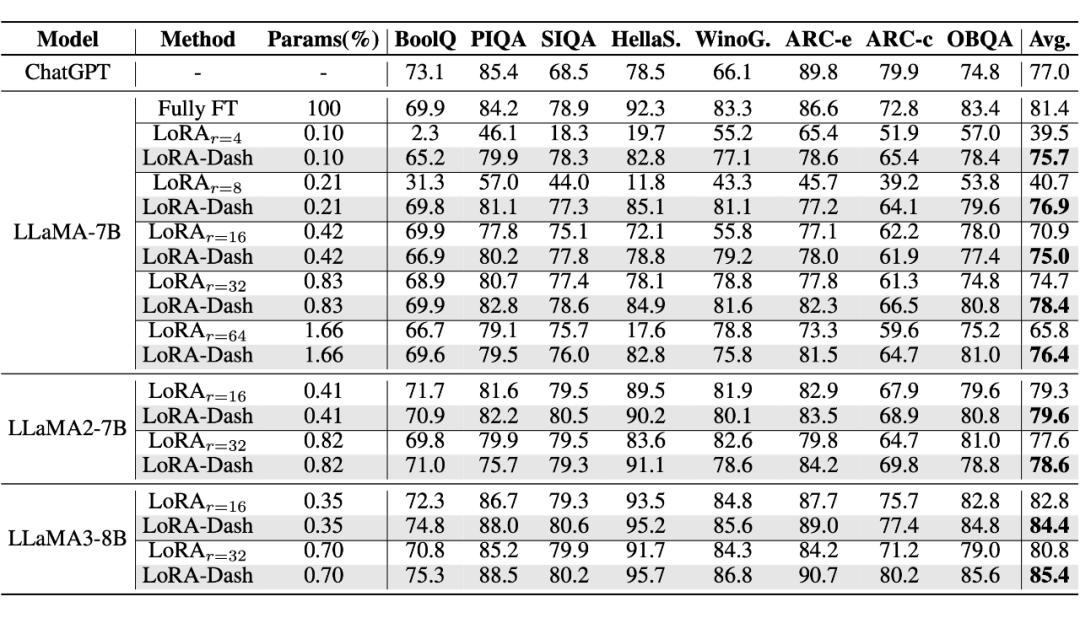
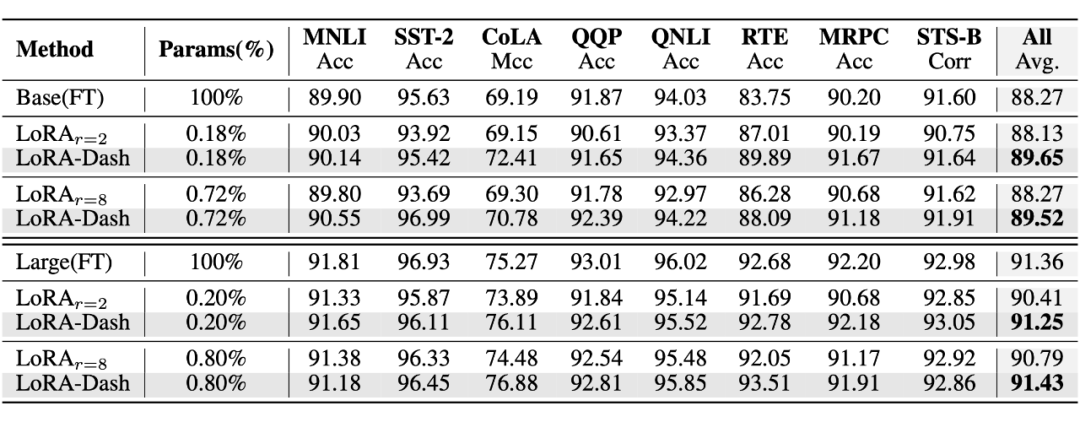
Experiments