

The actuator is a device with controllable deformation capabilities and serves as the “heart” of the micro robot. A research team from Tsinghua University has recently developed a film-like micro actuator that allows the micro robot to achieve continuous shape changes and “lock” its specific action forms, enhancing its adaptability to the environment. Researchers stated that using this actuator and a “building block” design method developed by the team, they have created the world’s smallest and lightest micro wireless amphibious robot known to date, measuring 9 cm in length and weighing 25 g.

Figure showing the micro wireless amphibious robot in ground movement mode (Image provided by Tsinghua team)
Enabling the robot to perform actions such as walking, running, jumping, flying, and climbing, while also being able to fix any shape at any time, is a key factor for the diversification of robot application scenarios. It is reported that small-scale actuators under 5 cm typically struggle to achieve both continuous shape changes and configuration locking simultaneously, which severely restricts the miniaturization and wireless development of robots with multiple movement modes.
Based on innovations in material and structural collaborative design methods, Professor Zhang Yihui’s research group from the School of Aerospace Engineering at Tsinghua University and the National Key Laboratory of Flexible Electronics has independently developed micro actuators as small as a few millimeters, which can serve as “deformable exoskeletons” for integrating sensors, motors, and other functional components, thereby constructing complex robotic systems.
“Making a robot small, light, wirelessly controlled, and capable of complex shape switching is very challenging,” said Zhang Yihui. The new actuator exhibits excellent deformation and locking capabilities, allowing for continuous deformation to any state and “locking” the shape through electrical control—something that has been difficult to achieve with previous small-sized actuators. The micro amphibious robot assembled using this actuator can run and fly, with a maximum ground movement speed of up to 1.6 meters per second.
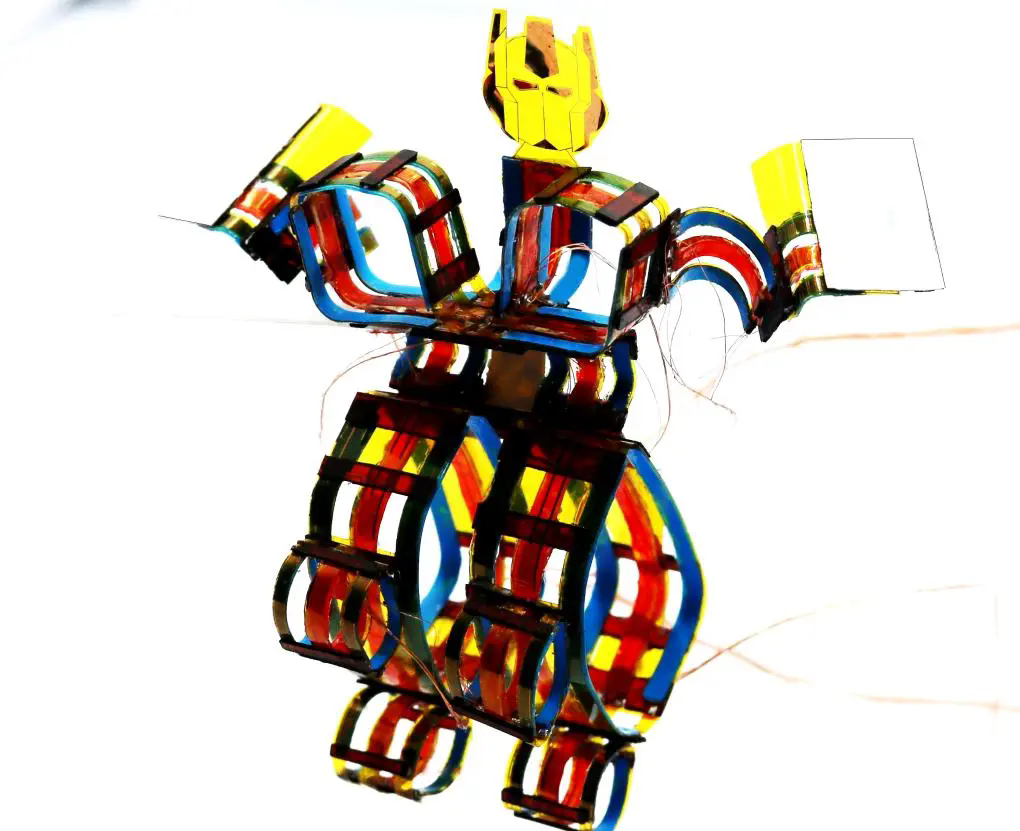
Figure showing a mini version of “Transformers” made up of multiple actuator units (Image provided by Tsinghua team)
Additionally, the team has created a mini version of “Transformers” that is 4.5 cm tall and weighs only 0.8 g using more than 10 actuators.
Zhang Yihui stated that this achievement provides new ideas and pathways for the development and application of micro robots. In the future, this type of micro amphibious robot could be applied in scenarios such as equipment fault diagnosis and maintenance, geological and cultural relic exploration, replacing humans in performing various tasks in complex and hazardous environments.
Source: Science Popularization China
If you encounter issues such as 1. Sharing content or images that infringe your copyright; 2. Errors found in WeChat content, please contact us immediately, and we will promptly review and handle or delete.
Scan to follow