With the transition from traditional fuel vehicles to hybrid and eventually pure electric vehicles, addressing global climate change and achieving carbon neutrality goals, the future of autonomous vehicles cannot be ignored. Today, autonomous driving capabilities are continuously evolving at the vehicle level. The automation levels defined by SAE are shown below:

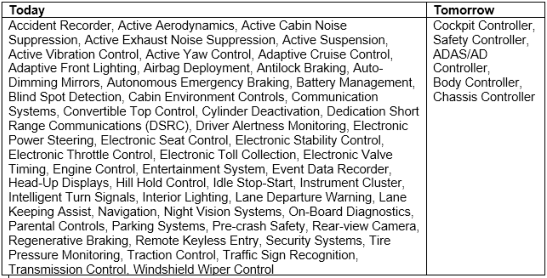
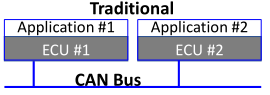
The majority of current ECUs were designed several years ago when the bandwidth of the CAN bus could meet the communication needs between various sensors, actuators, and ECUs. Each new function requires a new programmed ECU, which puts significant pressure on profit margins. More software code means higher complexity, which reduces reliability. The number of ECUs required for layered technology in vehicles has quickly surpassed the capability of the CAN bus/ECU architecture.
This has prompted automakers to further become integrators of hardware/software components based on Ethernet, similar to how computer manufacturers design new PCs and servers from available subcomponent markets like keyboards, power supplies, DIMMs, and processors.
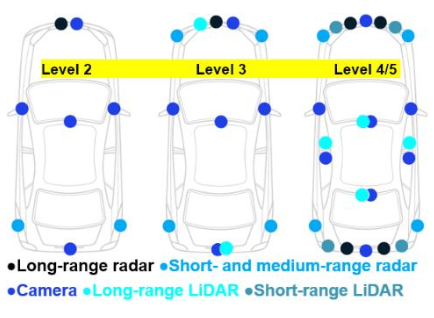
Today, vehicles increasingly feature L3-L5 functions, requiring more high-bandwidth sensors to support higher levels of autonomous driving. The L2 long-range radar sensors and cameras at the front of the vehicle support basic ADAS functions, including adaptive cruise control, lane departure warning, emergency braking, parking assistance, and driver status monitoring. Technology assists drivers, but the driver must maintain control. L3 short-range and long-range LiDAR help to see the surrounding conditions at night (when night camera performance is limited). At L4/5 levels, autonomous driving sensors provide comprehensive 360-degree visibility.
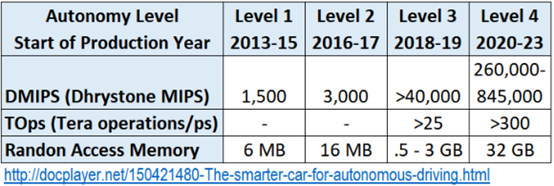
Bosch has predicted the 64-bit CPU and memory requirements for each level of automation (see below). A rapid leap is expected between the transitions of L2/3 and L3/4.
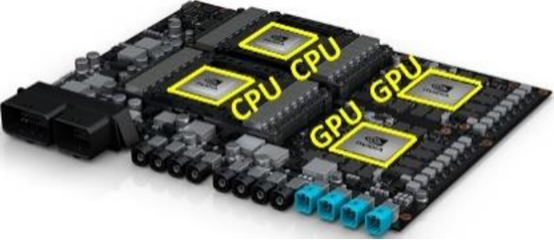
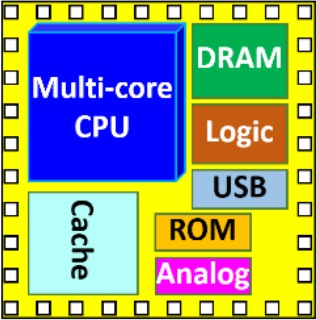
The massive amount of real-time data transmitted and received by autonomous driving creates bottlenecks in traditional control unit designs. L5 requires greater CPU power and memory. Companies like NVIDIA with DL-Pegasus-AI computers are using dual ARM CPUs and GPUs to handle ECU functions, generating 320 trillion operations per second (TOPs), as shown in the figure below. [1] More computing power is needed; for example, Qualcomm’s Snapdragon Ride ECU aggregation platform can provide 700 TOPs for L4/L5 autonomous driving. [2] These ultra-high-speed solutions seem to defy Moore’s Law, adopting low-cost, high-performance system-on-chip (SoC) designs that integrate multi-core CPUs, DRAM, and other logic components into a single chip.
As engineers improve L5, Intel estimates that an autonomous vehicle can generate 4 TB of data per day. [3] Predictions show that by 2030, there will be 259 million vehicles on the road in the United States, with one in ten vehicles achieving autonomous driving, producing 4 EB (Exabytes) of data per hour. [4]

As existing vehicle communication paths are overwhelmed by new data traffic, a new modernization phase is required. Bosch and other companies are adopting a decentralized domain controller (DCU) architecture that supports traditional ECU/CAN bus and future networks, as shown in the figure below. [5]
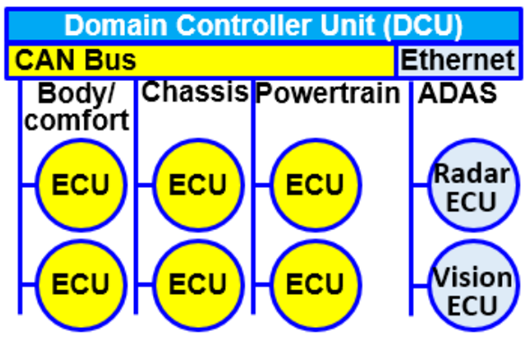
ECU integration allows automakers to update existing functions and potentially adopt concepts in IoT edge and cloud environments. This shift will support complex development, testing, and deployment of ADAS/autonomous driving controller systems, as well as AI/expert-based human driving capabilities and behaviors, especially during unpredictable emergency maneuvers. This cannot be achieved with 8/16-bit processors, and 70-150 ECUs are impractical since each ECU has its own CPU and memory. The goal of these controllers is integration; as Intel believes, integrating just infotainment and dashboard ECUs can save $60 to $100 per vehicle.
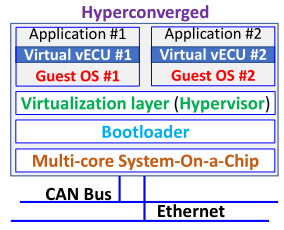
Software-defined designs in familiar hyper-converged server computing models will begin to appear in vehicles. Each application will be hosted on a virtual ECU and supported by necessary customer operating systems, as shown in the figure below. These systems can be supported by a virtualization layer, such as the open-source ACRN (a popular IoT hyper-converged virtual machine). [8] The bootloader starts the controller located at the top of the multi-core SoC processor.
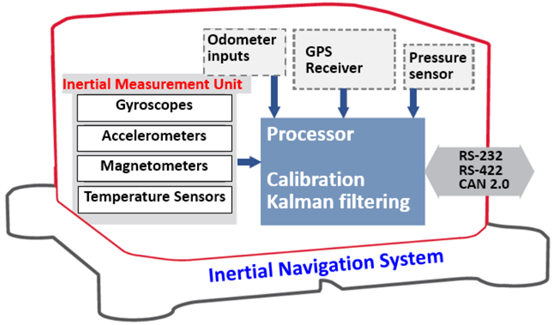
An aware vehicle, without a driver, reacts to its surroundings using algorithms and makes decisions based on sensor inputs, which many see as the panacea for vehicles. Awareness requires using cameras, LiDAR, and millimeter-wave radar, localization maps, intention-based planning, preferences, current conditions, precise control, and fault management to perceive the vehicle. When external signals are blocked or obscured by tunnels and skyscrapers, inertial navigation systems add real-time information, such as current through gyroscopes, accelerometers, magnetometers, and temperature sensors from inertial measurement units. [9] This processor runs the “Kalman” filtering algorithm, which uses linear quadratic estimation of sensor data over time to eliminate noise errors. [10]
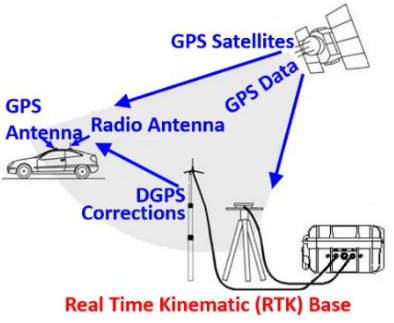
Nowadays, there is computing power to handle real-time vision systems, laser illumination and its reflections, radio waves to assist in distance, angle, and speed measurements. [11] By enhancing GPS with RTK fixed base station signals, vehicle navigation accuracy can be within 1 inch (2.54 cm), allowing for determining whether a person is on the shoulder or on the sidewalk. [12][13] Farmers use RTK to automatically guide tractors across fields. Behaviors derived from smartphones, social media, and devices can be combined with V2V data to determine road conditions, allowing vehicles to automatically avoid potholes, move to the right for emergency vehicles, and other situations.
From many industries, including the traditional PC market, today’s automotive computing model has matured to a disruptive degree. BMW, Volkswagen, and others hope to reduce costs and simplify processes by adopting open alliance Ethernet standards instead of creating proprietary networks. [14] Some manufacturers have increased the use of off-the-shelf commercial parts. [15] Standardization often spawns new niche suppliers, while traditional automakers take on more integration roles.
A new era of simpler, smarter, and more compact ECU architectures is approaching, where a single device can perform the work of many traditional units. This architecture must be secure, as it runs so much critical code. Additionally, this architecture includes support for 5G technology, allowing for remote code updates, providing drivers with current traffic data, and enabling vehicle technology to assist in avoiding potential hazards. Higher wireless vehicle bandwidth increases predictive sensor service data available to mechanics, enhances service and reliability, increases driver notifications for parking spaces, and guides drivers to charging stations without waiting.
Smart vehicles with more autonomous driving features require ECU integration and may introduce domain control units (DCUs) in the new architecture. Designs must also support basic real-time operations, such as motor control and anti-lock braking, as well as advanced autonomous driving requirements like camera recognition or radar target detection. The evolution and integration of ECUs will focus on CPU processing, large storage needs, support for other operating systems, and integration of computing with 64-bit address space.
[15] https://blog.samtec.com/post/connectors-for-the-automotive-world/

Scan to Follow Us
Beijing High-level Autonomous Driving Demonstration Zone