 The principle of wind power generation is to use wind to drive the rotation of the turbine blades, then through a speed-increasing device to enhance the speed to drive the generator to generate electricity, converting wind energy into mechanical energy, and then into electrical energy. According to the “2024 Global Wind Report” released by the Global Wind Energy Council (GWEC), the global wind energy industry is rapidly developing due to technological advancements and innovative business models. In 2023, the global newly installed wind power capacity reached 117 GW, a year-on-year increase of 50%. By the end of 2023, the cumulative global wind power installed capacity reached 1021 GW, a year-on-year increase of 13%. GWEC predicts that the global new installed capacity will reach 131 GW in 2024, with a CAGR of 9.4% over the next five years. China has rich wind energy resources, and in terms of global wind power market share, it has become the world’s largest wind power development country. GWEC data shows that in 2023, China’s newly installed wind power capacity accounted for 65% of the global market.
The principle of wind power generation is to use wind to drive the rotation of the turbine blades, then through a speed-increasing device to enhance the speed to drive the generator to generate electricity, converting wind energy into mechanical energy, and then into electrical energy. According to the “2024 Global Wind Report” released by the Global Wind Energy Council (GWEC), the global wind energy industry is rapidly developing due to technological advancements and innovative business models. In 2023, the global newly installed wind power capacity reached 117 GW, a year-on-year increase of 50%. By the end of 2023, the cumulative global wind power installed capacity reached 1021 GW, a year-on-year increase of 13%. GWEC predicts that the global new installed capacity will reach 131 GW in 2024, with a CAGR of 9.4% over the next five years. China has rich wind energy resources, and in terms of global wind power market share, it has become the world’s largest wind power development country. GWEC data shows that in 2023, China’s newly installed wind power capacity accounted for 65% of the global market.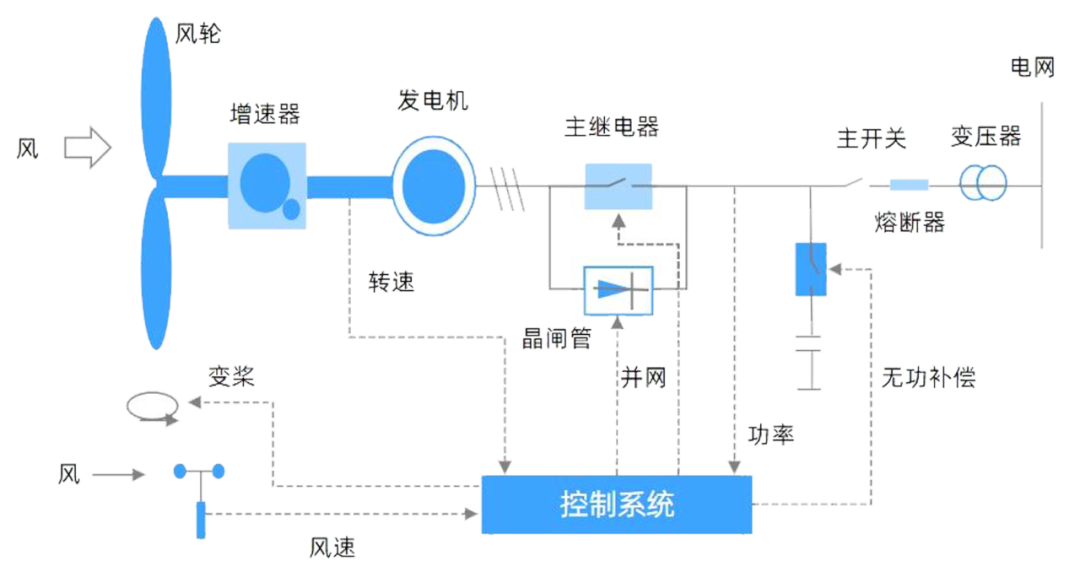 ▲ Schematic diagram of wind power generation principleThe expansion of the single unit capacity of wind turbines and the variable speed constant frequency operation of the system are two major development trends in the current grid-connected wind power generation technology. The main control system of the wind turbine is the core of the entire wind turbine control, ensuring the optimal operating state and safe and reliable operation of the wind turbine.At the same time, the design of the control system is also a difficulty in wind power technology. When using a parallel operation scheme with inverters to improve the system power level, the complexity of the control system design is greatly increased. The traditional controller architecture uses PLC as the master control and digital signal processor (DSP) as the slave, with communication between the master and slave through CAN or RS485, which has a slow transmission rate and low reliability, making it difficult to meet the real-time data transmission requirements during inverter parallel operation. In addition, traditional wind power inverter control systems generally use microprocessors, DSPs, and microcontrollers to complete the main control tasks. However, as the complexity of the inverter control system increases, the tasks of the microprocessor also become heavier, needing to complete some low-level algorithms while achieving real-time communication with the upper computer, which may reduce the stability and reliability of the inverter control system during long-term operation.Therefore, Ethernet control technology, widely used in industrial control systems, is gradually being applied in wind turbine control systems. The real-time industrial Ethernet technology EtherCAT developed by Beckhoff, Germany, is designed based on standard Ethernet technology, featuring a flexible network topology, simple configuration, high effective data rate, full-duplex data exchange, and ease of implementation. Applying it to wind turbine control systems can solve the above problems, simplify control devices, reduce the complexity of control systems, and improve the real-time control capability and operational safety of the control system.
▲ Schematic diagram of wind power generation principleThe expansion of the single unit capacity of wind turbines and the variable speed constant frequency operation of the system are two major development trends in the current grid-connected wind power generation technology. The main control system of the wind turbine is the core of the entire wind turbine control, ensuring the optimal operating state and safe and reliable operation of the wind turbine.At the same time, the design of the control system is also a difficulty in wind power technology. When using a parallel operation scheme with inverters to improve the system power level, the complexity of the control system design is greatly increased. The traditional controller architecture uses PLC as the master control and digital signal processor (DSP) as the slave, with communication between the master and slave through CAN or RS485, which has a slow transmission rate and low reliability, making it difficult to meet the real-time data transmission requirements during inverter parallel operation. In addition, traditional wind power inverter control systems generally use microprocessors, DSPs, and microcontrollers to complete the main control tasks. However, as the complexity of the inverter control system increases, the tasks of the microprocessor also become heavier, needing to complete some low-level algorithms while achieving real-time communication with the upper computer, which may reduce the stability and reliability of the inverter control system during long-term operation.Therefore, Ethernet control technology, widely used in industrial control systems, is gradually being applied in wind turbine control systems. The real-time industrial Ethernet technology EtherCAT developed by Beckhoff, Germany, is designed based on standard Ethernet technology, featuring a flexible network topology, simple configuration, high effective data rate, full-duplex data exchange, and ease of implementation. Applying it to wind turbine control systems can solve the above problems, simplify control devices, reduce the complexity of control systems, and improve the real-time control capability and operational safety of the control system.
Main Control System of Wind Turbines Based on EtherCAT Technology
 The main task of the wind turbine main control system is to collect the current unit parameters, provide reasonable operating instructions to each sub-control unit based on the wind field conditions and optimal wind energy capture strategy, and complete operations such as yaw, pitch control, power conversion, and grid connection. At the same time, the main control system must establish a good human-machine interface, capable of displaying and querying the operating status and parameters of the wind turbine, showing fault status, and setting wind turbine operating parameters on the control panel. In addition, the unit control system needs to have remote communication capabilities with the upper computer in the wind farm, allowing the central control room to monitor the operating status and data of each unit in real-time, thus adjusting the operational requirements for the units. The main control system of the wind turbine mainly includes the unit master controller, inverter control unit, pitch control system, yaw control system, hydraulic system, braking system, user interface, communication interface, and several sub-control systems.
The main task of the wind turbine main control system is to collect the current unit parameters, provide reasonable operating instructions to each sub-control unit based on the wind field conditions and optimal wind energy capture strategy, and complete operations such as yaw, pitch control, power conversion, and grid connection. At the same time, the main control system must establish a good human-machine interface, capable of displaying and querying the operating status and parameters of the wind turbine, showing fault status, and setting wind turbine operating parameters on the control panel. In addition, the unit control system needs to have remote communication capabilities with the upper computer in the wind farm, allowing the central control room to monitor the operating status and data of each unit in real-time, thus adjusting the operational requirements for the units. The main control system of the wind turbine mainly includes the unit master controller, inverter control unit, pitch control system, yaw control system, hydraulic system, braking system, user interface, communication interface, and several sub-control systems.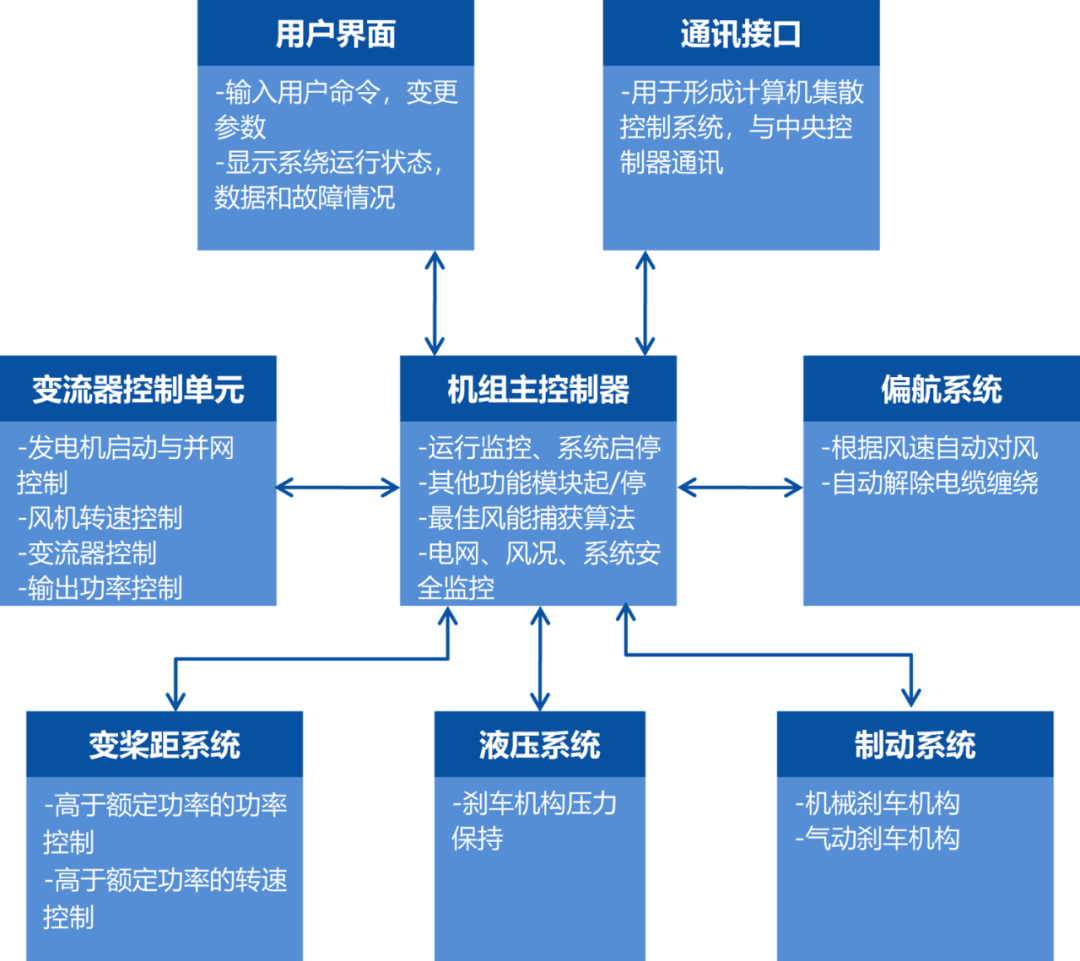 ▲ Main components of the EtherCAT-based wind turbine main control systemWith the EtherCAT technology-based wind turbine control system, the optimal algorithm for wind energy capture is used to collect all parameters within the unit, and then issue corresponding operating instructions to different control units. In the human-machine interaction interface, it can provide operators with wind parameters, operating status, and specific locations of faults that occur during the operation of the generator set. Moreover, this control system also needs to have the function of remotely controlling the central control room computer, allowing real-time detection of the operating conditions, data, and issues of the wind turbine by the central control room.A PC with a MAC interface serves as the master station of the unit control system, configuring the slave stations and their operating modes through programming, running wind turbine monitoring software, and periodically sending data frames containing commands to the slave controllers via the Ethernet, achieving control over the inverter, pitch, and yaw systems, thus meeting the control requirements for starting and stopping the wind turbine, power conversion, grid connection, data collection, and pitch control. At the same time, each slave controller can insert data into the corresponding message and feedback to the master PC within the control cycle. Due to the excellent network performance and data transmission capability of EtherCAT technology, the system can effectively and timely monitor the unit status in real-time and can perform real-time control of the pitch and power conversion devices of the unit under sudden wind changes, tracking maximum wind energy and improving system efficiency.
▲ Main components of the EtherCAT-based wind turbine main control systemWith the EtherCAT technology-based wind turbine control system, the optimal algorithm for wind energy capture is used to collect all parameters within the unit, and then issue corresponding operating instructions to different control units. In the human-machine interaction interface, it can provide operators with wind parameters, operating status, and specific locations of faults that occur during the operation of the generator set. Moreover, this control system also needs to have the function of remotely controlling the central control room computer, allowing real-time detection of the operating conditions, data, and issues of the wind turbine by the central control room.A PC with a MAC interface serves as the master station of the unit control system, configuring the slave stations and their operating modes through programming, running wind turbine monitoring software, and periodically sending data frames containing commands to the slave controllers via the Ethernet, achieving control over the inverter, pitch, and yaw systems, thus meeting the control requirements for starting and stopping the wind turbine, power conversion, grid connection, data collection, and pitch control. At the same time, each slave controller can insert data into the corresponding message and feedback to the master PC within the control cycle. Due to the excellent network performance and data transmission capability of EtherCAT technology, the system can effectively and timely monitor the unit status in real-time and can perform real-time control of the pitch and power conversion devices of the unit under sudden wind changes, tracking maximum wind energy and improving system efficiency.
System Implementation of EtherCAT-based Wind Turbine Slave Stations
The implementation of EtherCAT technology includes the master station implementation and slave station implementation. The EtherCAT master station does not require a dedicated communication device; it only needs to use a device with an Ethernet MAC, such as a standard industrial PC with a MAC interface. In addition to having an Ethernet card for master-slave control with EtherCAT slave stations, the PC should also have an interface for communication with the central monitoring system of the wind farm.In the wind turbine control system, the slave stations include controllers for inverter control, pitch control, yaw control, and braking control, as well as EtherCAT slave controllers that connect these control devices via Ethernet, used for communication and control functions between the master and slave stations. ▲ System architecture of EtherCAT-based wind turbine slave stationsThe EtherCAT slave controller is used to implement the EtherCAT protocol and handle data frames, serving as the core for EtherCAT communication in the entire wind turbine slave station. The EtherCAT slave controller has three main interfaces: it connects to the master station or other slave stations via RJ45, forming different topologies, and is also the hardware interface for data transmission via network cables; it uses EEPROM to store slave device file information, from which the master station reads slave information to identify and configure the slave; and it exchanges data with the microprocessor through PDI (Physical Data Interface).
▲ System architecture of EtherCAT-based wind turbine slave stationsThe EtherCAT slave controller is used to implement the EtherCAT protocol and handle data frames, serving as the core for EtherCAT communication in the entire wind turbine slave station. The EtherCAT slave controller has three main interfaces: it connects to the master station or other slave stations via RJ45, forming different topologies, and is also the hardware interface for data transmission via network cables; it uses EEPROM to store slave device file information, from which the master station reads slave information to identify and configure the slave; and it exchanges data with the microprocessor through PDI (Physical Data Interface). ▲ Typical EtherCAT wind turbine sub-slave structure diagram
▲ Typical EtherCAT wind turbine sub-slave structure diagram
CodeLing Semiconductor EtherCAT Wind Turbine Slave Station Solution
CodeLing Semiconductor has launched the CF110x series EtherCAT slave controller chips, providing an economical and compact solution for implementing EtherCAT slave stations in wind turbines. The product is officially authorized by Beckhoff and has passed the ETG official conformance testing certification, complying with EtherCAT communication protocol standards. It features 8 Fieldbus Memory Management Units (FMMUs), 8 Sync Managers (SMs), and supports three data interfaces (PDI) – digital I/O, SPI, and 8/16 bit uC interfaces, with a built-in 64-bit distributed clock (DC) capable of achieving high-precision synchronization of EtherCAT slaves (<< 1μs). It can optionally integrate a 32-bit ARM Cortex-M3 core microcontroller (MCU) or two current-type PHYs (compatible with 100BASE-TX), offering strong anti-interference capability, high signal integrity, and good stability. Various packaging options are available, supporting QFN64L (9x9mm), QFN88L (10x10mm), and QFN100L (12x12mm) packages.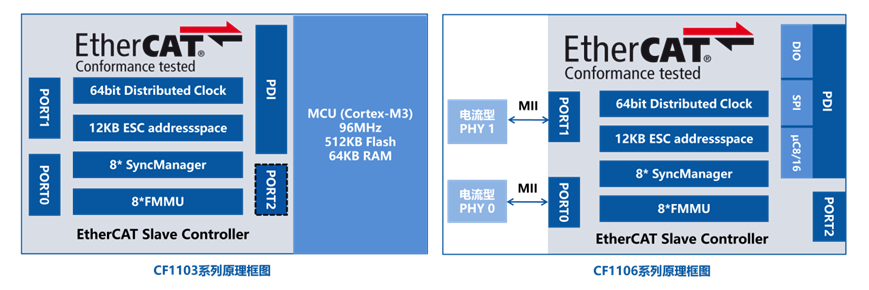 ▲ Structure diagram of CodeLing Semiconductor CF110x series chips
▲ Structure diagram of CodeLing Semiconductor CF110x series chips ▲ Physical image of CodeLing Semiconductor CF110x series chipsThe CF110x series supports multiple EtherCAT application layer protocols such as CoE, FoE, VoE, and can be widely used in scenarios such as inverter control, pitch control, yaw control, and braking control in wind turbine control systems, helping to simplify control devices, reduce the complexity of control systems, and improve the stability and reliability of wind turbine control systems.The CodeLing Semiconductor CF110x series provides a complete development ecosystem, allowing customers to quickly get started, shorten development cycles, and rapidly bring products to market. The CF110x series offers a comprehensive application development ecosystem, including development evaluation boards and software development tools, with complete technical documentation, including product descriptions, data sheets, user manuals, development board design source files (including schematics/PCB/BOM), hardware design guidelines, SDKs, and product test reports.
▲ Physical image of CodeLing Semiconductor CF110x series chipsThe CF110x series supports multiple EtherCAT application layer protocols such as CoE, FoE, VoE, and can be widely used in scenarios such as inverter control, pitch control, yaw control, and braking control in wind turbine control systems, helping to simplify control devices, reduce the complexity of control systems, and improve the stability and reliability of wind turbine control systems.The CodeLing Semiconductor CF110x series provides a complete development ecosystem, allowing customers to quickly get started, shorten development cycles, and rapidly bring products to market. The CF110x series offers a comprehensive application development ecosystem, including development evaluation boards and software development tools, with complete technical documentation, including product descriptions, data sheets, user manuals, development board design source files (including schematics/PCB/BOM), hardware design guidelines, SDKs, and product test reports.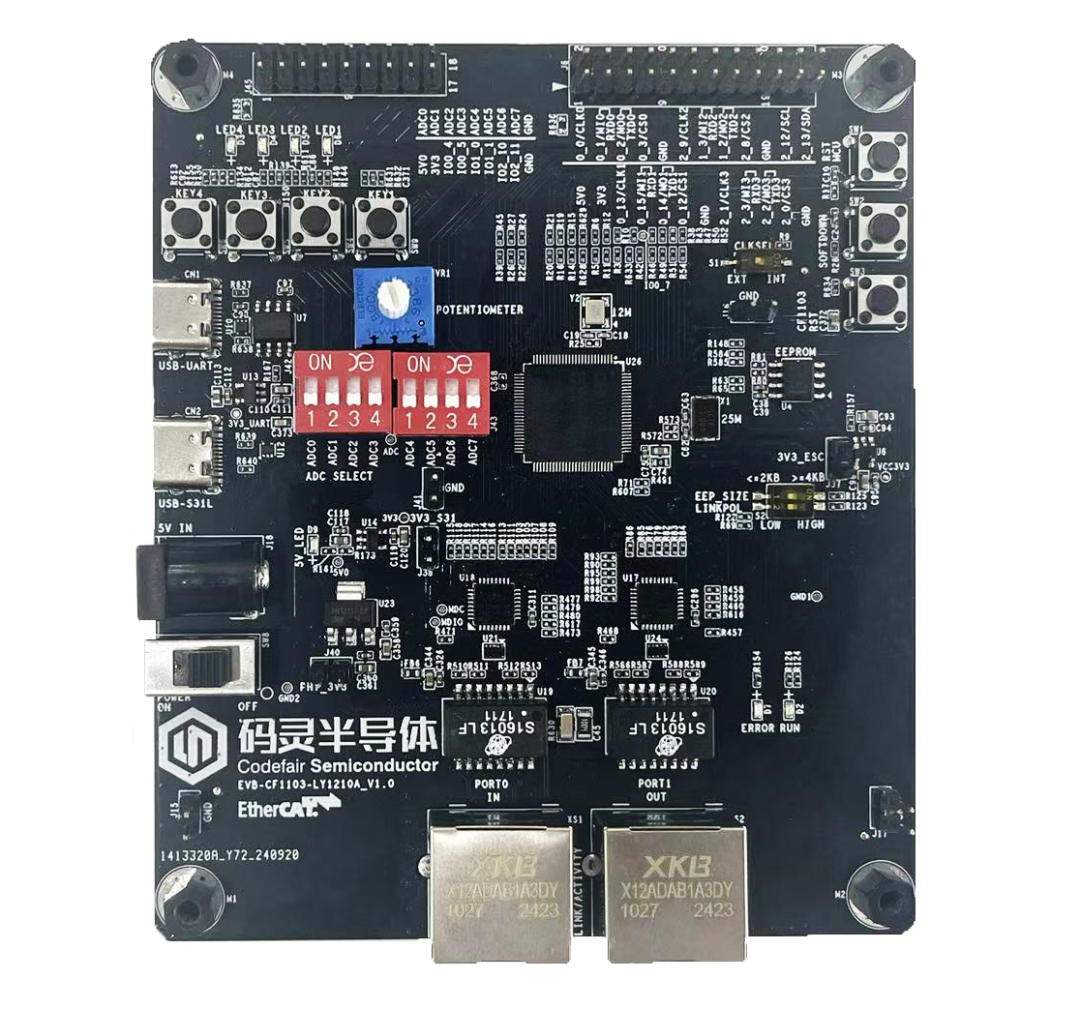 ▲ CF1103A model development evaluation board
▲ CF1103A model development evaluation board ▲ CF1103B model development evaluation board
▲ CF1103B model development evaluation board ▲ CF1106A model development evaluation board
▲ CF1106A model development evaluation board ▲ CF1106B model development evaluation boardFor more information about the CF110x series EtherCAT slave controller products, please contact Manager Li at CodeLing Semiconductor at 18759007589 (WeChat same number).
▲ CF1106B model development evaluation boardFor more information about the CF110x series EtherCAT slave controller products, please contact Manager Li at CodeLing Semiconductor at 18759007589 (WeChat same number).
Previous Recommendations
Application of EtherCAT Technology in Data Acquisition Systems
Application of EtherCAT Technology in Brushless DC Motor Drive Systems
Application of EtherCAT Technology in Smart Substation Monitoring Systems
