To better serve the teaching and research work of teachers, the library utilizes databases and online resources to retrieve relevant information and periodically pushes discipline news. This issue focuses on the research field of “robotics technology,” retrieving, reviewing, and selecting published papers and patents, with the following recommendations.
1. Paper Recommendations
1. Multi-Robot Systems and Cooperative Object Transport: Communications, Platforms, and Challenges
The article is from the National Institute of Electronics and Communications in Japan, published in March 2023 in the high-level journal IEEE OPEN JOURNAL OF THE COMPUTER SOCIETY.
Compared to single-robot systems, multi-robot systems have gained attention due to their lower costs, better robustness, and greater scalability. Cooperative object transport, as a well-known use case of multi-robot systems, shows great potential in practical applications.
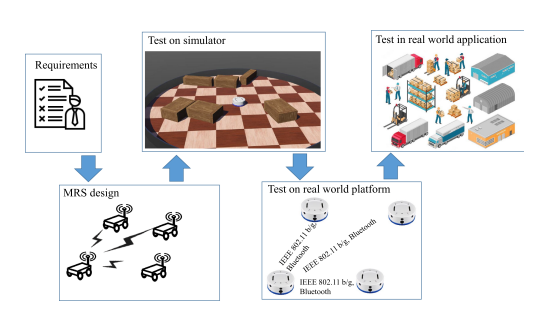
Figure 1 Concept of Multi-Robot Systems
The design and implementation of multi-robot systems involve many technologies, particularly communication, coordination, task allocation methods, experimental platforms, and simulators. However, current research on multi-robot systems mostly focuses on coordination and task allocation issues, with little attention paid to communication among robots. This article emphasizes the communication, verification platforms, and simulators of multi-robot systems and discusses one of the important applications of multi-robot systems—cooperative object transport. First, we study the basic principles of multi-robot systems and provide a comprehensive review of communication technologies for multi-robot systems. Then, we investigate commonly used verification platforms, testbeds, simulators, and middleware in academia and industry. Finally, we discuss the latest advancements in cooperative object transport and the challenges faced by multi-robot systems, as well as potential future research directions.
Source: IEEE OPEN JOURNAL OF THE COMPUTER SOCIETY, Vol 4, 2023
2. Indoor Positioning Systems of Mobile Robots: A Review
The article is from the University of Rostock, published in May 2023 in the journal ROBOTICS.
In recent years, with the deepening development of Industry 4.0 globally, mobile robots have become a research hotspot. Indoor positioning has become a key component in many fields and is the basis for all actions of mobile robots. This article reviews 147 papers on indoor positioning of mobile robots published between 2019 and 2021. First, it provides a detailed introduction and comparison of 12 mainstream indoor positioning methods and related positioning technologies for mobile robots. Then, it summarizes the selected papers, identifying their common attributes and trends, leading to conclusions about the development trends in indoor positioning for mobile robots.
Source: Robotics 2023, 12, 47
3. The Science of Soft Robot Design: A Review of Motivations, Methods and Enabling Technologies
The article is from the École Polytechnique Fédérale de Lausanne, published in February 2023 in the high-level journal FRONTIERS IN ROBOTICS AND AI.
New technologies, manufacturing methods, controllers, and computational methods are rapidly enhancing the capabilities of soft robots. This has created a demand for design techniques and methods suitable for the multidisciplinary nature of soft robots. These require a formal and scientific design approach, as illustrated in Figure 2. This article formalizes the scientific questions driving soft robot design: What are the motivations for designing soft robots? What are the fundamental challenges in designing soft robots? We review current methods and approaches to soft robot design, including bio-inspired design, computational design, and human-driven design, highlighting the impact of each design method on the final soft robot system. In summary, we analyze emerging methods that contribute to robot design and review some necessary technologies that may enable these methods.
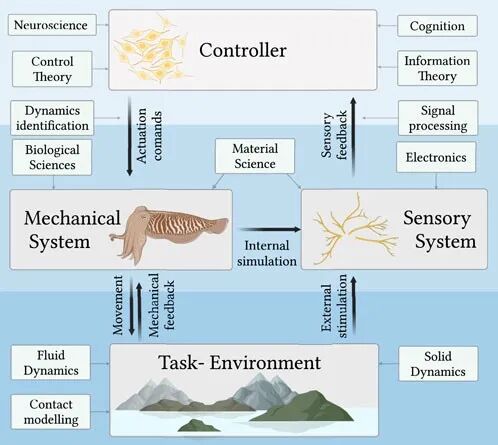
Figure 2 Schematic of Design Methods
Source: Front. Robot. AI, 18 January 2023
4. Advanced Sensors Technologies Applied in Mobile Robot
The article is from the University of Ljubljana, published in April 2023 in the high-level journal Sensors.
This article focuses on mobile robot systems, noting the widespread increase in current applications and the promising future applications supported by the latest technologies in sensor development. Mobile robots have entered our homes, and it is hard to imagine modern manufacturing and warehousing systems without autonomous transport systems. Autonomous vehicles are already operating on normal roads, flying taxis are about to take off and provide new travel experiences, and drones have been applied in delivery and remote sensing. Applications also exist in agriculture, construction, healthcare, monitoring, entertainment, and other fields, some of which will develop in unforeseen ways, all providing a new emerging market with enormous potential. In the multidisciplinary field of mobile robotics research, advanced sensor technologies are key to achieving automation or autonomous operation of mobile robots in these applications. They play a role in any navigation, motion control, action planning, decision-making, environmental recognition, localization, perception, object recognition, target tracking, or object manipulation.
Source: Sensors 2023, 23(6), 2958
5. Benchmarking Teamwork of Humans and Cobots: An Overview of Metrics, Strategies, and Tasks
The article is from the University of Bayreuth, published in June 2023 in the high-level journal IEEE ACCESS.
Human-robot collaboration is receiving increasing attention in research, development, and industrial fields. New methods of task sharing in mixed teams include everything from optimizing schedules to highly autonomous intelligent collaborative robot assistants. These methods must demonstrate their usefulness and advantages compared to manual work or full automation, especially when assessing their potential in productive industrial applications. This leverages the need for standardized, repeatable benchmarks to compare methods and measure improvements in a reproducible manner. Designing such benchmarks is challenging, as many aspects must be considered, from safety considerations to human factors and team performance. This survey aims to contribute to the future development of benchmarks in the field of collaborative assembly, handling, and industrial collaborative robot applications by providing a comprehensive overview of relevant metrics, evaluation strategies, and tasks for human-robot teams.
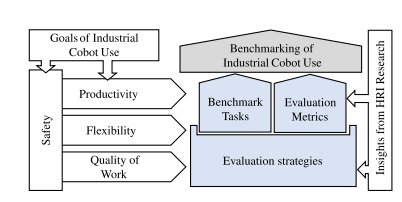
Figure 3 Evaluation Strategies
Source: ACCESS.2023.3271602
6. Augmented Reality for Supporting Workers in Human-Robot Collaboration
The article is from the Basque Resource and Technology Alliance, published in May 2023 in the journal MULTIMODAL TECHNOLOGIES AND INTERACTION.
This article discusses the potential benefits of using augmented reality (AR) technology to enhance human-robot collaboration in industrial processes. The authors describe a real-world use case at a Siemens workplace where AR-based authoring tools were used to reduce cognitive load, assist human workers in training robots, and support calibration and inspection tasks during assembly tasks. This study highlights the potential of AR as a solution to optimize human-robot collaboration and improve productivity. The paper describes the methods used to deploy and evaluate ARContent tools, demonstrating improved usability, reduced task load, and increased efficiency during assembly. However, the study was limited by the availability of workers and their limited knowledge of robot assembly tasks. The authors suggest that future work should focus on testing ARContent tools in a larger user pool and improving authoring tools based on the shortcomings identified in the study. Overall, this work demonstrates the potential of augmented reality technology to revolutionize industrial processes and improve collaboration between humans and robots.
Source: Multimodal Technol. Interact. 2023, 7(4), 40
7. Mobile Robot: Automatic Speech Recognition Application for Automation and STEM Education
The article is from Vietnam National University, published in March 2023 in the high-level journal SOFT COMPUTING.
Today, robots are widely used in life as well as in industrial production, healthcare, rescue, learning, and entertainment. There are many types of robots using different modern technologies, such as manipulation, movement, and bionic robots; each type is applied according to its role. Robots are also applied in training, especially in STEM training implemented using mobile robots.
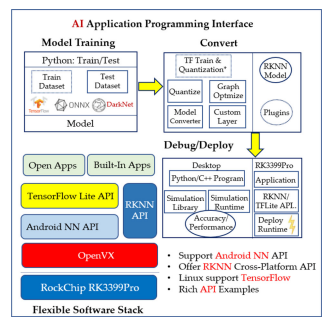
Figure 4 AI Development Tools
This article proposes a model for designing mobile robots that combines Android operating system tablets, including user interaction interfaces, speech control models, and AIDL IPC remote control interaction models. We studied a mobile robot using the Rockchip RK3399Pro AI processor, focusing on understanding the structure and operating mechanism of the AI processor used in the Rockchip robot, while also studying the Android system based on IPC AIDL architecture and automatic speech recognition technology. Based on the results of this study, it will serve as the foundation for research and development systems to support students in interacting and learning with mobile robots through multilingual speech. STEM education, gamified in nature, applies courses, especially training programs widely researched, to mobile robots with greater flexibility.
Source: Soft Computing (2023)
8. Application and Analysis of Remote Sensing Image Processing Technology in Robotic Power Inspection
The article is from the State Grid Fujian Electric Power Company, published in May 2023 in the journal JOURNAL OF ROBOTICS.
With the increase in electricity consumption in society, higher quality requirements for power inspection have been proposed. Traditional manual inspection methods struggle to ensure the stability of inspection quality. In the absence of widespread manual distribution stations and smart grid methods, replacing manual inspections with power inspection robots can improve inspection quality and efficiency to some extent.
With the widespread application of image processing technology in robotic systems, visual impact is not only an effective way for us to obtain information but also a key reflection of the intelligence level of robotic systems. Drones, as an extremely important type of robot, have long been widely used in various industries. Power inspection is the most common robotic inspection application for drones. However, due to extreme conditions such as bad weather, relative motion of imaging equipment, and shaking, the inspection images can become blurred. The quality of inspection images is crucial for timely understanding, analysis, and judgment of the power engineering quality inspection database.
This article takes the drone power inspection robot as a research foothold and proposes a complete disambiguation optimization calculation method based on exploring key technologies to eliminate image ambiguity. It selects an image denoising optimization calculation method based on time-frequency analysis and edge-preserving directional features to locate images, reasonably addressing the image resolution bottleneck of GIS in drone robot line inspections. At the same time, with the emergence of nanorobots in the 21st century, this article’s application and analysis of remote sensing image processing technology in the field of robotic power inspection will also bring new vitality to the research of nanorobots for power inspection, solving the problem of unclear images in nanorobots.
Source: Journal of Robotics Volume 2023, Article ID 9943372
9. Advances in Space Robots for On-Orbit Servicing: A Comprehensive Review
The article is from Harbin Institute of Technology, published in May 2023 in the high-level journal ADVANCED INTELLIGENT SYSTEMS.
Space robots play an important role in on-orbit servicing (OOS) tasks, such as inspecting, capturing, fueling, and repairing satellites, assembling and maintaining large space infrastructure, and clearing orbital debris. Over the past forty years, many engineering applications and OOS technology validations of space robots have been completed. This article comprehensively reviews the progress of representative space robot projects on the Space Shuttle, inside and outside the International Space Station, the Chinese Space Station, and satellites, summarizing the development trends of space robots. Additionally, it discusses key technologies and challenges, including: 1) visual perception of non-cooperative targets; 2) motion planning and control with free-floating bases and flexibility; 3) multifunctional end effectors; 4) long-delay ground teleoperation; 5) high-fidelity ground verification. Finally, it looks forward to future research on space robots.
Source: Adv. Intell. Syst.2023, 2200397
10. Toward Unified Adaptive Teleoperation Based on Damping ZNN for Robot Manipulators With Unknown Kinematics
The article is from Sun Yat-sen University, published in May 2023 in the high-level journal IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS.
Traditional teleoperation systems are usually designed for a specific type of robot and require a specific kinematic model. This leads to high computational costs, poor robustness, and low portability in traditional teleoperation systems.
This article proposes a unified adaptive teleoperation system for different types of robots. To this end, a closed-loop control system based on Damping Zeroing Neural Network (DampZNN) is proposed to achieve unified motion control of redundant robots and continuum robots with unknown motion. This control system is based on two dampznns, used for estimating unknown motion models and solving the kinematic inverse problem, respectively. By combining the DampZNN control system with teleoperation technology, a unified adaptive teleoperation system is proposed, allowing operators to conveniently teleoperate redundant and continuum robots. Experiments based on different types of robots validate the effectiveness of the proposed teleoperation system and reveal its advantages through comparative studies.
Source: IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 70, NO. 9, SEPTEMBER 2023
2. Patent Recommendations
1. A Dual-Mode Underwater Robot with Wheel Walking and Floating Capabilities Under Ice
The patent proposed by the Shenyang Institute of Automation, Chinese Academy of Sciences, was disclosed on April 28, 2023.
This invention belongs to the field of new concept underwater robot technology, specifically a dual-mode underwater robot with wheel walking and floating capabilities under ice. It includes a support frame and a wheeled walking mechanism, propeller, control navigation system, energy system, observation payload system, and optical system mounted on the support frame, which is equipped with buoyancy materials; the wheeled walking mechanism is set on both sides of the support frame; the observation payload system carries marine environmental data observation equipment; the upper part of the support frame is equipped with a satellite antenna; the control navigation system and energy system are set in a fully sealed pressure-resistant cabin, achieving underwater robot ice-bottom autonomous walking and floating movement through the wheeled walking mechanism and propeller. This invention has a dual-mode switching function for walking and floating, enabling the underwater robot to autonomously walk on the ice bottom and float in the water, obtaining multi-factor information about the marine environment under the specified sea area and near the ice bottom.
2. A Robot Jumping Mechanism and Jumping Method
The patent proposed by Beijing Institute of Technology was disclosed on March 14, 2023.
This invention relates to the field of robotics technology, specifically a robot jumping mechanism and jumping method, including a chassis, shell, pre-adjustment mechanism, energy storage mechanism, main force-bearing mechanism, jumping trigger mechanism, and return mechanism; the main force-bearing mechanism includes a force plate, linkage mechanism, main spring, and jumping support component; the return mechanism includes a return spring, force plate positioning mechanism, energy storage positioning mechanism, and shell positioning mechanism; the pre-adjustment mechanism controls the shell to move up and down on the chassis; the force plate is connected to the jumping support component through a sleeve structure, and the main spring is fitted around the sleeve structure; the force plate is equipped with a compression trigger component, and the energy storage positioning mechanism is used to limit the compression trigger component; the energy storage mechanism contracts the sleeve structure and main spring through a linkage device; it also includes a first unlocking device, second unlocking device, third unlocking device, fourth unlocking device, a positioning restart key cooperating with the pre-adjustment mechanism, and an energy storage activation key cooperating with the compression trigger component; this invention improves the operability of jumping.
3. A Lifting Structure for Autonomous Remote-Controlled Underwater Robots
The patent proposed by the Shenyang Institute of Automation, Chinese Academy of Sciences, was disclosed on June 6, 2023.
This invention relates to the field of underwater robot technology, specifically a lifting structure for autonomous remote-controlled underwater robots. The lifting structure includes a lifting hook assembly, isolation plate, and lifting frame assembly, where the lifting hook assembly is set at the top of the lifting frame assembly, and the lifting hook assembly is isolated from the lifting frame assembly by the isolation plate. The lifting hook assembly has two lifting forms, and the lifting frame assembly has one lifting form; the lifting frame assembly is used for fixed connection with the frame of the autonomous remote-controlled underwater robot. This invention has a simple structure, is easy to implement, has high strength, and good corrosion resistance, suitable for multiple working conditions of heavy autonomous remote-controlled underwater robots.
4. An Amphibious Robot with Fixed Wings
The patent proposed by Harbin Institute of Technology was disclosed on May 26, 2023.
This invention relates to the field of amphibious robot technology. This invention solves the problem that existing amphibious robots tend to have the composite mobile platform and flying platform load each other after being combined, and that the composite mobile platform can damage the integrity of the overall wing shape and the aerodynamic characteristics of the robot in flying mode. The tiltable quadrotor flying mechanism has four rotor components arranged oppositely on both sides of the fuselage near the front and rear ends of the wings, and the ground mobile platform is a two-wheeled leg self-balancing crawling mechanism, with two leg components symmetrically installed in the ground mobile platform storage slots on both sides of the fuselage bottom. In flying mode, the leg components can be fully retracted into the fuselage and perform flying operations through the four rotor components. This invention ensures the integrity of the overall wing shape and the aerodynamic characteristics of the robot in flying mode.
5. A Bionic Naked Sea Butterfly Underwater Detection Robot
The patent proposed by Beihang University was disclosed on March 28, 2023.
This invention discloses a bionic naked sea butterfly underwater detection robot, involving the field of bionic underwater robot technology, including a main body part, which is equipped with a control system; the main body part has symmetrically arranged wing-foot parts that can achieve pitching and fore-aft swinging; the bottom of the main body part is movably connected to a tail abdomen part, which can achieve up-down swinging and left-right swinging. The bionic naked sea butterfly underwater detection robot provided by this invention is small in size, has good maneuverability, and can perform deep-sea detection.
6. A Bionic Single-Leg Jumping Robot
The patent proposed by Beijing Institute of Technology was disclosed on June 2, 2023.
This invention provides a bionic single-leg jumping robot, involving the field of jumping robot technology, including a single-leg jumping robot body and a motor, where the single-leg jumping robot body can jump into the air, and the motor is set on the single-leg jumping robot body and can control the posture of the single-leg jumping robot body in the air through the rotation of the motor shaft. The bionic single-leg jumping robot provided by this invention can achieve single-leg jumping and has the function of adjusting posture in the air.
7. A Three-Degree-of-Freedom Biped Robot
The patent proposed by Tsinghua University was disclosed on June 2, 2023.
This invention provides a three-degree-of-freedom biped robot, involving the field of robotics technology. The three-degree-of-freedom biped robot includes a body, motion mechanism, and balance mechanism, where the motion mechanism is set on both sides of the body and is connected to the body for rotation, forming a four-bar linkage structure with the body, and the balance mechanism is set on the body, suitable for applying a balancing torque to the body. The three-degree-of-freedom biped robot provided by this invention has an optimized overall structure, which can reduce control difficulty, improve motion accuracy, and lower costs.
— End —
Related Reading

Discipline News: Recommended Reading of Professor John Goodenough’s Doctoral Thesis
Contributed by | Han Lu
Typeset by | Han Lu
Edited by | Sheng Qiuyan

Long press the QR code to follow us▷


Click the bottom right to light up Looking⇲