Abstract: From the perspective of agents, this article introduces and summarizes the research on intelligent vehicles as single-agent systems; it analyzes and elaborates on the research progress of multi-agent systems in typical scenarios of intelligent connected vehicles. It introduces the parallel driving technology of “vehicle-end perception and remote control” as a future development trend for intelligent vehicles, and discusses how Intel’s RSS model regulates the decision-making of intelligent vehicles from a legal perspective. Finally, it looks forward to the control strategies of intelligent vehicles based on multi-agent systems.
Keywords: Intelligent vehicles; Agents; Multi-agent systems; Parallel driving; RSS model
The rapid development of key artificial intelligence technologies such as intelligent sensing, big data, cloud computing, and the Internet of Things in recent years has greatly promoted the progress of intelligent vehicles, which integrate perception, planning, decision-making, and execution functions into a complex intelligent system. The emergence of intelligent vehicles will greatly improve traffic conditions, reduce environmental pollution, alleviate traffic load, ensure traffic safety, and thus better promote social development.
An agent, also known as a proxy system, is a concept that emerged in the mid-1980s, belonging to the field of distributed artificial intelligence. Since the 1980s, agents and multi-agent systems have undergone rapid development. Agents have become a mature and promising research and application field, gathering and drawing from the achievements, concepts, and ideas of many disciplines, including artificial intelligence, computer science, sociology, economics, organizational and management sciences, and philosophy. The success of agent systems has modernized the definition of distributed artificial intelligence (DAI) to the research, construction, and application of multi-agent systems; that is, systems composed of multiple intelligent agents interacting with each other to pursue certain goals or complete tasks. The agent-based approach is very suitable for traffic and transportation management systems due to its geographical distribution characteristics and periodic busy-idle operation features. Notably, air traffic control and conflict management systems were among the first areas where agent technology was applied, and related research remains very active. Distributed traffic monitoring tasks (DVMT) are another early milestone in the history of agent research and distributed artificial intelligence. Lesser and Corkill proposed the concept of a “blackboard” for communication between agents distributed geographically with different data and goals. Each agent can perceive a portion of the monitored area. However, with the rise of modern control, especially hierarchical control, solutions to urban traffic management problems and traditional control methods based on functional decomposition have become increasingly prevalent in theoretical research and practical applications. Currently, most research efforts focus on developing hierarchical structures, analytical modeling, and optimization algorithms for effective real-time applications in traffic, such as CRONOS, OPAC, SCOOT, SCAT, PRODYN, RHODES, and other traffic control systems.
The future intelligent traffic systems (ITS) should be composed entirely of intelligent, autonomous agent systems. These agents operate between traffic control centers, road intersections, highways, and streets, acquiring accurate information at the right time through the Internet, wireless networks, and self-organizing networks, making the most correct decisions, ultimately achieving intelligent traffic systems.
In recent years, an increasing number of studies have applied agent-based methods to intelligent vehicle issues, such as automatic parking, transportation planning, distributed control, and traffic simulation. Although these are all important issues in traffic systems, the core problems of intelligent traffic systems have not been systematically addressed. Connected intelligent vehicles utilize Vehicle-to-Everything (V2X) technology to achieve information exchange between vehicles and other agents, liberating cars from the traditional isolated driving environment, effectively reducing traffic accidents, alleviating traffic congestion, and improving travel efficiency. The BDI model models intelligent vehicles as agents with Belief, Desire, and Intention; beliefs represent the agent’s perception of the world, including data describing the environment and its own functions, such as the motion state of surrounding intelligent vehicles, road conditions, traffic signals, and the intelligent vehicle’s own navigation and speed, which form the basis of the agent’s cognitive activities; desires represent the agent’s expectations and judgments about the state of the environment, where vehicles need to make judgments based on belief information regarding acceleration, lane changes, and maintaining safety; intentions are the goals the agent aims to achieve, guiding current actions. Traditional control systems are decomposed into multiple task-oriented agents, greatly optimizing processing efficiency and energy consumption, which is of great significance for pursuing safe and efficient intelligent vehicle technology.
This article’s first part starts from the basic characteristics of agents, first introducing intelligent vehicles themselves as a whole composed of multiple agent modules such as perception, management, and decision-making, analyzing the collaboration and cooperation among agent modules, forming an evolvable and developing autonomous driving learning system. Next, the second part introduces the application of agent technology in connected intelligent vehicles, summarizing the control strategies of vehicles as agents in typical scenarios such as lane changing, intersections, and vehicle platooning. The third part summarizes the framework of agent-based intelligent vehicle simulation systems. The fourth part introduces agent-based parallel driving as a safe and efficient intelligent approach for intelligent vehicles to be safely on the road, as well as how the RSS model regulates the behavior of intelligent vehicle agents from a legal perspective. Finally, a summary is provided, and a prospect for the future application of agent technology in intelligent vehicles is presented.
1 Multi-Agent Based Intelligent Vehicle Architecture
The most widely accepted definition of an agent comes from Russell and Norvig, describing it as a flexible and autonomous entity that perceives its surrounding environment and operates through actuators. Figure 1 shows the composition of an agent system.
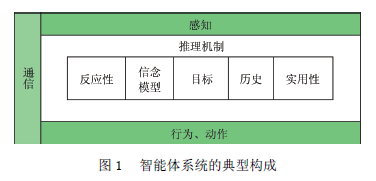
Compared to general simple controllers, the characteristics of agents are as follows:
(1) Situational Awareness: Agents can interact with their surrounding environment through sensors and actuators; all inputs to the agent are direct results of its interaction with the environment. This distinguishes them from expert systems.
(2) Autonomy: Agents can independently choose their actions without human intervention or influence from other agents in the network. This property ensures that the internal state of the agent is unaffected by external disturbances, especially instabilities caused by external perturbations.
(3) Reasoning: Agents have the ability to infer abstract characteristics of goals based on observations, which can be achieved by utilizing relevant available content.
(4) Responsiveness: Agents can perceive the state of the environment and respond promptly to changes in the environment, which is particularly important in applications with high real-time requirements.
(5) Proactiveness: Agents possess a certain opportunistic characteristic, capable of actively responding to changes in the environment based on goal needs, especially in dynamically changing environments.
(6) Sociality: Although agents can be unaffected by changes in the external environment, they need to interact with the external environment to achieve their goals. They should also help other agents achieve their goals through the process of sharing experiences.
Intelligent vehicles can be regarded as heterogeneous multi-agent hybrid systems composed of multiple agents for perception, planning, and decision-making tasks. The intelligence of intelligent systems is reflected in their ability to learn knowledge and skills and apply them to improve performance.
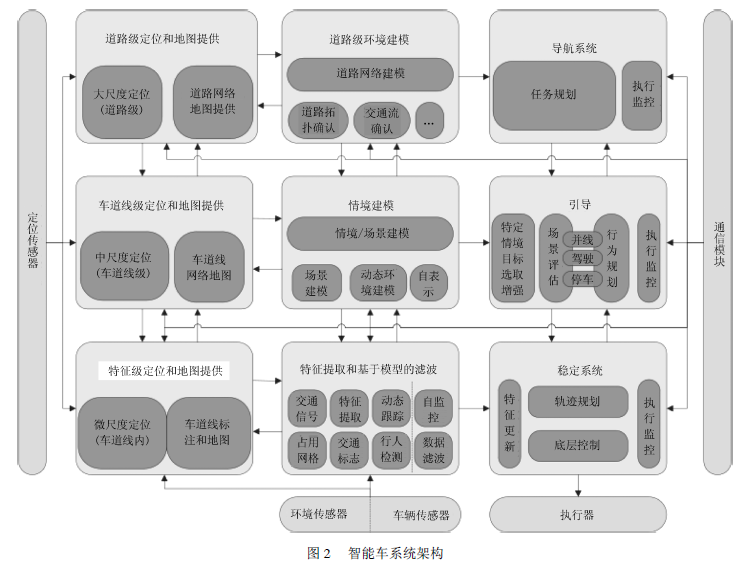
Intelligent driving vehicles utilize a perception system composed of sensors such as LiDAR, millimeter-wave radar, cameras, and GPS, as shown in Figure 2, to collect data about their surrounding environment in real-time, completing tasks such as recognizing traffic lights, detecting lane lines, obstacles, and pedestrians. The information obtained from perception is processed by the vehicle’s central processor, which makes decisions for subsequent actions such as lane changing and braking. In a connected environment, communication can occur with other vehicles, the cloud, and roadside equipment to achieve perception and operational information sharing tasks.
The entire process involves parallel processing of multiple tasks, allocation of computational resources, and information exchange. How to ensure real-time and accurate attainment of ideal results and guarantee the safe and smooth operation of intelligent vehicles is currently a hot research topic. Control of intelligent vehicles based on agents is an effective solution to this problem.
The sensor system is the foundation for intelligent vehicles to perceive their environment. The diversity of sensors ensures comprehensive information acquisition, but the complexity of data fusion and resource management in multi-sensor systems also arises. Introducing agent technology into multi-sensor systems can effectively address this issue. In multi-sensor systems, agents not only play a management role but also acquire data from sensors and plan for sensor range, resource allocation, and execution time.
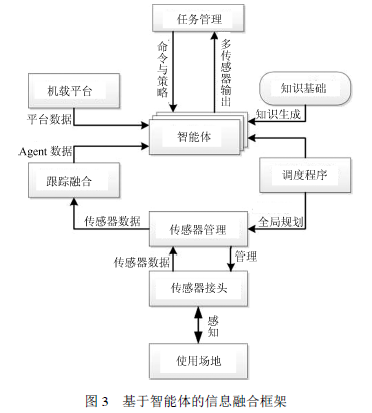
A multi-agent intelligent vehicle navigation system based on information fusion divides navigation tasks into coordinated and reactive types, where agents complete information exchange and coordinate operations, combining image processing and information fusion methods to achieve obstacle avoidance navigation. Additionally, the task processing of various functional modules of current intelligent vehicles is relatively complex, so multiple tasks can be assigned to multiple cooperating agents for execution, as shown in Figure 3.
Multi-agent intelligent vehicles can model environmental parameters that may lead to conflicts to reduce traffic accidents, for example, calculating safe following distances based on vehicle models, weight, state, and weather factors. Additionally, multi-agent systems can repeatedly perform parallel computations across multiple processors, enabling real-time communication among various modules of intelligent vehicles, enhancing decision-making effectiveness. Multi-agent technology can be applied within single intelligent vehicle systems. The system architecture consists of decision-making, management, and sensing layers, each composed of several communicative agents. The parallel communication between different agents ensures the synchronization of their tasks, thereby reducing execution time. The system architecture is shown in Table 1.
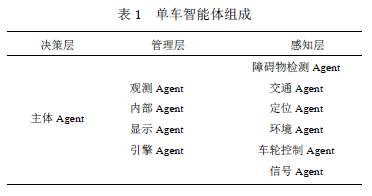
This system adopts a centralized control architecture, where the main agent has the highest control authority, using reinforcement learning to enhance decision-making capabilities, while agents in the perception layer have the lowest authority, responsible for providing perception information to higher levels, which can issue control commands to lower levels.
2 Connected Intelligent Vehicle Agent Control
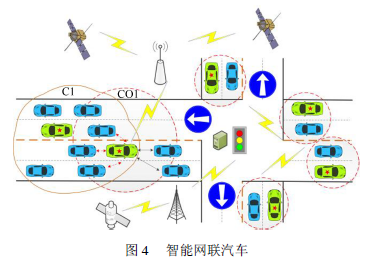
Current research on intelligent vehicles mainly focuses on single vehicle systems in perception, planning, and decision-making modules, where each vehicle performs its own tasks such as detection, obstacle avoidance, and sign recognition, with the data collected by each vehicle not being shared with others. This requires each vehicle’s functional modules to be highly reliable. The emergence of intelligent connected vehicles will greatly enhance the efficiency of single vehicles. Intelligent connected vehicles refer to new-generation vehicles equipped with advanced onboard sensors, controllers, actuators, and integrated modern communication and network technologies, enabling information exchange and sharing among humans, vehicles, roads, and the cloud, and possessing functions such as complex environmental perception, intelligent decision-making, and coordinated control, with a typical architecture shown in Figure 4.
The combination of intelligent vehicles and communication technology promotes the development of collaborative perception and operation technologies. Collaborative perception allows multiple intelligent vehicles to share perception information with each other, while collaborative operation enables coordination among vehicle actuators. These features ensure the possibility of cooperation between intelligent vehicles, thereby improving overall driving quality and safety.
The following sections will introduce the control strategies for intelligent vehicle agents in typical scenarios such as lane changing, intersections, and vehicle platooning.
2.1 Lane Changing Scenarios
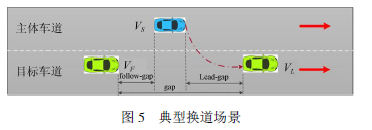
The decision-making ability of intelligent vehicles in complex environments, especially under unstructured road conditions, is a standard for measuring their intelligence. In any traffic model and simulation system, lane changing scenarios are very important research points. In the study of lane changing problems, it is essential to consider the interaction of information between vehicles, how intelligent vehicles make timely, effective, and safe decisions based on predictions of surrounding vehicles’ driving intentions and changes in the environment while integrating their dynamic information is the focus of lane changing scenario research. Lane changing scenarios can be divided into free lane changing, forced lane changing, and cooperative lane changing, as shown in Figure 5. In free lane changing scenarios, the agent of the vehicle waiting to change lanes does not need to interact with surrounding vehicle agents and can choose the timing of lane change based on the safe distance from surrounding vehicle agents; forced lane changing involves the waiting vehicle agent forcing surrounding vehicle agents to decelerate to create a safe distance for lane changing, while cooperative lane changing is based on information exchange between the waiting vehicle agent and surrounding vehicle agents, where surrounding vehicle agents actively adjust their driving strategies to ensure the safe lane change of the waiting vehicle agent. The model imposes restrictions on the lane changing conditions of the waiting vehicle agent. The point of merging is called MP (Merge Point), and the acceleration upon reaching the merge point is AM (Merge Acceleration).
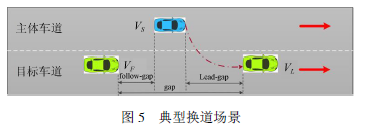
Where dx is the distance from the current position to the MP point, vMP and aMP are the speed and acceleration of the vehicle at the MP point, and vs is the speed of the waiting vehicle agent. When the vehicle reaches the lane changing point, whether it is suitable to change lanes is determined based on the distance (gap) between vehicles, the relative speed between vehicles, and the defined AM.
Two commonly used models for controlling speed and deciding when to change lanes are the Intelligent Driver Model (IDM), which models the longitudinal dynamics of vehicles, and the MOBIL model, which decides when to change lanes by minimizing the number of braking instances.
Controlling vehicle speed and lane changing can be viewed as a reinforcement learning problem. Based on the IDM and MOBIL models, a deep Q-network (DQN) agent is proposed, combining deep learning and Q-learning to learn the Q function. Based on the known states of surrounding vehicles and available road information, the agent selects the best actions for lane changing, acceleration, and deceleration from its action space, as defined in Table 2.
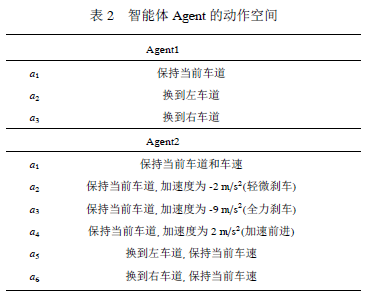
As shown in Table 2, Agent 1 controls only the lane change decision, while its speed is automatically controlled by the IDM model:
Agent 2, on the other hand, uses the IDM model to control speed and estimates the speed of surrounding vehicle agents while using the MOBIL model for lane change decision-making, with the decision conditions as follows:

Where ae, an, and ao represent the current vehicle’s acceleration, the acceleration of the vehicle in the target lane, and the acceleration of the vehicle in the current lane, respectively.
WANG et al. utilized Long Short-Term Memory (LSTM) networks to model the interactive environment, transmitting internal states containing historical driving information to the deep Q network (DQN). Under the deep reinforcement learning framework, the cumulative returns from the long-term effects of the interactive environment can be used to determine the best control strategy, which can be applied to intelligent vehicles’ driving and lane-changing in complex intersections. Human drivers can often rely on observations and feelings of surrounding traffic conditions to easily change lanes and overtake on highways. However, sudden intrusions and lane changes can increase the likelihood of accidents during driving, affecting other drivers’ normal driving. For intelligent vehicles, such actions require a decision-making system to complete, thus intelligent vehicles need to make safe and harmonious decisions.
When overtaking is necessary, intelligent vehicles must continuously predict the behavior of surrounding vehicles during driving, and then negotiate between cooperating to change lanes or maintaining their driving status. BMW has incorporated prediction algorithms into the decision-making process, first using a polynomial regression classifier for real-time predictions, then selecting corresponding avoidance or non-avoidance strategies in the action space, ultimately achieving cooperative behaviors based on uncertainties from other vehicles.
2.2 Intersections
Intersections in cities are generally the areas with the most severe congestion. Many methods have been attempted in the past to address congestion at intersections. For example, optimizing traffic signal control at intersections, sending the status of the intersection to drivers to prompt them to change lanes in advance, and sorting vehicles in the order of arrival are all static processing methods with less than ideal effects.
The coordination strategies among intelligent vehicle agents at intersections are generally divided into centralized and decentralized methods, as shown in Table 3:
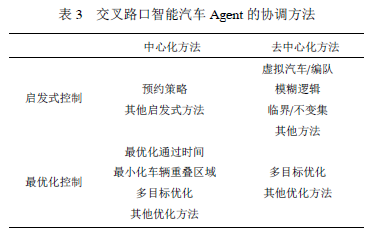
Decentralized multi-agent systems can be applied to coordinate autonomous vehicles at intersections due to their distributed and interactive characteristics, connecting vehicles with intersection intelligent agent networks, allowing for information exchange and coordinated operation among vehicle agents. ROOZEMOND proposed an agent-based urban intersection control system that responds promptly to changes in the traffic environment and adjusts its decisions based on internal states. This system includes multiple Intersection Traffic Signal Agents (ITSAs), Road Segmentation Agents (RSAs), and several management agents. ITSAs manage the control signals of the intersection with the help of RSAs, while management agents control and coordinate ITSAs to achieve globally optimal results. Choy presented a hierarchical multi-agent system, where the lowest layer consists of Intersection Controller Agents (ICAs), the middle layer consists of Spatial Controller Agents (ZCAs), and the highest layer consists of Regional Controller Agents (RCAs). Agents make decisions based on neural network and fuzzy control techniques to adapt to dynamically changing environments.
Traffic signal control systems are physically distributed and logically decentralized within dynamically changing traffic networks, treating each intersection’s traffic signal controller as a heterogeneous agent, which is very suitable for modeling using model-free, self-learning, data-driven multi-agent reinforcement learning methods. Reinforcement learning agents interact with controlled objects in a closed-loop system, extracting the traffic state information and feedback reward information needed for signal control by observing the real-time state of the traffic environment, aiming to select the optimal control strategy to maximize cumulative returns. As a model-free, self-learning iterative data-driven method, Multi-agent Reinforcement Learning (MARL) provides an intrinsic solution for adaptive control with closed-loop feedback. In the field of traffic signal control, from a control theory perspective, MARL control can autonomously learn and optimize strategy knowledge based on feedback information regarding control effects, representing a form of closed-loop feedback; based on the coordination level of traffic states and signal actions among agents, traffic network MARL control can be divided into three categories: fully independent multi-agent reinforcement learning control, partially cooperative multi-agent reinforcement learning control, and action-linked multi-agent reinforcement learning control. From the perspective of system scalability, decentralized MARL control has a unified structural model that can be tailored to specific road network structures and traffic flow characteristics. In terms of control real-time performance, it does not have complex model optimization modules and can respond to time-varying traffic flow changes in real-time.
In the absence of interaction among all traffic participants, traditional knowledge-based methods assume that the states and intentions of surrounding vehicles are known, while planning-based methods assume that agents can maintain constant speed based on their reactive and rapid replanning behaviors, but this often results in suboptimal outcomes. In contrast, a method that considers interactivity is the Partially Observable Markov Decision Process (POMDP). This method treats the paths of surrounding vehicles as partially observable variables, using a motion interaction model to simulate interactions between vehicles and a random observation model to obtain future potential measurement parameters of surrounding vehicles, thereby optimizing the planning of intelligent vehicle agents in future scenarios. Their framework has the following characteristics:
(1) Applicable to any geometric structure of intersections and a variable number of traffic participants;
(2) Considers the uncertainty of predicting the future intentions of other traffic participants based on the current state and does not rely on V2V communication;
(3) Operates in continuous state spaces and can be adjusted online.
2.3 Vehicle Platooning
One important application scenario of intelligent connected vehicles is vehicle platooning. Each vehicle in the platoon can be modeled as an agent with perception, self-organization, and decision-making capabilities, with multiple vehicles communicating using Vehicle-to-Vehicle (V2V) devices. Vehicles in the same lane can maintain smaller inter-vehicle distances, increasing road capacity and driving safety, reducing traffic congestion, and enhancing fuel economy.
As a key technology in intelligent connected vehicles, Wireless Sensor Networks (WSN) form the basis for connectivity. Sensor networks installed on vehicles and roads are the core of the perception module. Roadside sensor networks can monitor traffic flow, vehicle motion information in the area, and can also be used to track specific vehicles or targets. Target tracking algorithms based on WSN can be roughly divided into two categories: non-predictive tracking and predictive tracking.
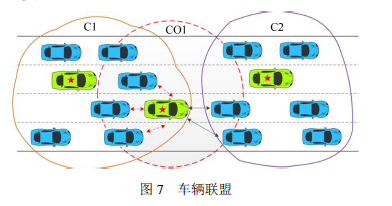
WSN, as a distributed system, allows nodes to have independent problem-solving capabilities, possessing autonomous characteristics, and is very similar to multi-agent systems. When a single agent cannot independently complete a task due to a lack of information, knowledge, ability, or resources, multi-agent collaboration can effectively solve the problem. Therefore, sensor nodes can be viewed as agents, applying multi-agent technology to collaborative target tracking applications in sensor networks. Perception agents (SA), management agents (MA), and alerting agents (AA) form a dynamic alliance. In the tracking phase, when a tracking target appears, the AA agent sends a signal, the SA agent performs dynamic tracking and makes local decisions, and sends monitoring data and state information to the MA agent. Throughout the tracking process, the states of the three types of agents continuously change, and the activated agents in the sensor network also change with the position of the tracked object, indicating that the alliance and its members are in a constant state of renewal and dissolution. Within the alliance, the data between SA agents and MA agents are processed through Bayesian estimation methods for collaborative information processing, ensuring that the newly managed MA agent is produced in the most efficient manner.
Vehicle platooning typically includes a leading vehicle and a group of following vehicles. However, a significant issue is that vehicles may continuously join and leave the platoon, making it crucial to manage this dynamic changing environment effectively.
The decentralized dynamic connected vehicle alliance structure generation algorithm cvCSG decomposes the vehicle set into mutually incompatible alliances, each with a dominant vehicle that determines whether the alliance’s combination is beneficial through communication with its members and decides when members leave and new members join. The algorithm uses the following scene characteristics:
(1) The traffic system has no central processing node, and the dominant vehicle only has control effects over its own alliance;
(2) There is no central node with global knowledge; all dominants and their members obtain the surrounding information they need through V2V communication;
(3) Communication is achieved through single-segment or multi-segment path planning.
The traffic environment is dynamically changing, and the network topology is continuously changing with these changes being unknown in advance.
Using the platooning algorithm only requires dynamic information from nearby vehicles, making it suitable for large platooning scenarios and easy to converge to the desired formation when vehicles join and leave. A control algorithm for information-physical vehicle platooning in a clustered environment utilizes the coordinated overall characteristics of mobile intelligent agent self-organizing networks, modeling the collective behavior of intelligent vehicles as multi-objective flocking motion (Multi-Objective Flocking). Unlike the fixed platoon operation of vehicles, flocking motion allows vehicles to join or leave the platoon at any time, making the convoy more flexible when encountering obstacles and narrowing roads ahead. This flexibility is also reflected in the fact that intelligent vehicle agents in the convoy do not need to have the same destination, and the formation does not need to be rigid like a fixed platoon. When multiple agents only communicate with intelligent agents in their surrounding neighborhood and possess cohesion, self-organization, and self-adjustment capabilities within a certain time interval, they can be regarded as exhibiting flocking behavior. Based on the theoretical foundation of flocking behavior, the following aspects have been studied:
(1) Collision avoidance of intelligent vehicle agents in curved, straight, entangled road environments;
(2) Lane changing in multi-lane situations;
(3) Braking control in emergency situations;
(4) Turning and avoiding collisions with pedestrians.
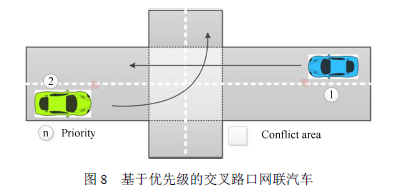
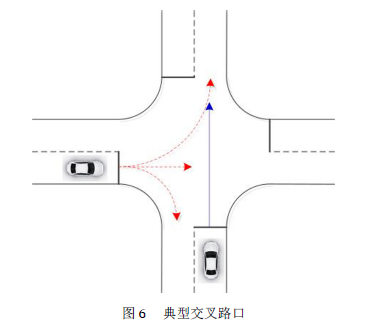
In a connected environment, intelligent vehicles, due to their V2V and V2X communication capabilities, can plan their paths according to current traffic dynamics under the coordination of agent systems, sharing some of their navigation information with other vehicles, as shown in Figure 8. This interactive cooperation can ensure smooth passage through intersections without congestion, with vehicles passing according to the first-come-first-served principle assigned by intersection intelligent agents.
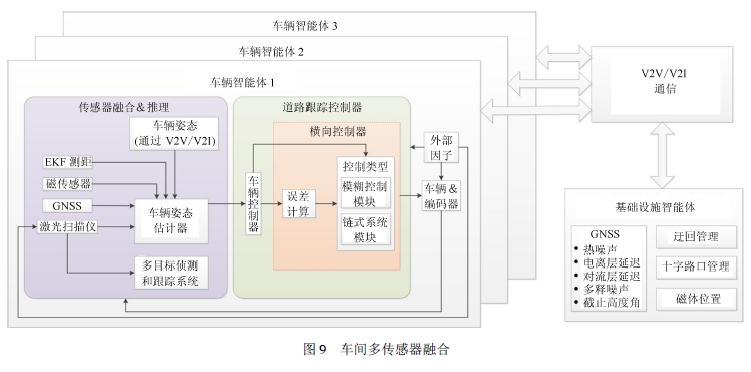
In general intelligent connected vehicle research, intelligent vehicle agents primarily utilize their perception modules to perceive environmental information, while the V2X module is used to interact with surrounding communicable devices to obtain additional information. This model places high demands on intelligent vehicle agents. DE et al. proposed an agent-based learning framework, where roadside infrastructure monitors the road environment and makes the most reasonable plans for intelligent vehicle agents entering the area based on the traffic environment. Connected intelligent vehicles are modeled as rational agents, utilizing a Vehicle-to-Infrastructure (V2I) communication architecture to achieve road infrastructure-dominated strategy learning through deep imitation learning. The motion of dynamically decision-making agents is simulated as navigating a maze in an environment with constant-speed obstacles, integrating multi-sensor information fusion among vehicles, as shown in Figure 9, using reinforcement learning to make decisions for the specific behaviors of intelligent vehicle agents.
2.4 Agent-Based Intelligent Vehicle Simulation
The increase in traffic volume and the reduction in speed caused by traffic accidents and lane changes are the main reasons for highway congestion. To study traffic flow prediction methods and traffic congestion alleviation strategies, traffic simulation can replicate traffic conditions that are difficult to reproduce in reality. Multi-agent systems are very suitable for modeling and simulating traffic systems because they provide an intuitive way to describe intelligent entities at each level. In multi-agent traffic simulation systems, each intelligent entity is modeled as an agent, which can coexist with other agents in competitive and cooperative ways. Previous studies have utilized genetic algorithms and cellular automata for traffic simulation but lacked efficient algorithms for predicting optimal congestion alleviation strategies.
Deep Q-learning in reinforcement learning can determine the best strategy in complex environments. In traffic environment simulations for autonomous driving, the simulation environment treats each vehicle as an agent that continuously interacts with the environment to complete the following tasks: (1) Observe the current state of the environment; (2) Determine the agent’s behavior; (3) Execute the corresponding action; (4) Change the environment to another state; (5) Obtain the returns corresponding to the state changes; (6) Perform Q-learning. A scene-by-scene optimization approach is taken, with Q-value calculations trained using convolutional neural networks.
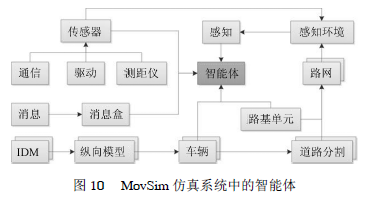
The geographic distribution, dynamic environment, and inter-system interactions of traffic systems make them very suitable for simulation using agent-based methods. GM et al. expanded the multi-model open-source vehicle-traffic simulator MovSim suite to propose collaborative traffic modeling. Utilizing the local perception characteristics, information exchange, and collaborative execution features of multi-agent systems, vehicles complete collaborative perception, decision-making, and execution.
To reduce the waiting time of intelligent vehicles at intersections and the travel time of other vehicles in emergency situations, KT et al. designed a control system for simulating intelligent vehicles at intersections. They used SUMO (Simulation of Urban Mobility) as a microscopic traffic simulator and the JADE (Java Agent Development Framework) framework to reproduce a simulation system similar to real traffic systems based on multi-agent systems, introducing Q-learning to make traffic light agents smarter. Traffic simulation is crucial for the development of intelligent vehicles, as it is impossible to artificially create special scenarios in real environments to test vehicles’ reactions in emergencies.
BN et al. designed a simulation debugging system for intelligent vehicles based on multi-agent technology, as shown in Figure 11.
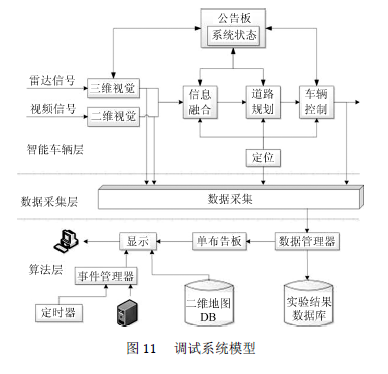
It employs a distributed architecture, modeling the two-dimensional, three-dimensional, information fusion, road planning, and vehicle control of intelligent vehicles as agents, with each agent cooperating with others effectively to improve system execution efficiency and execution time. In summary, agent-based traffic simulation systems have the following advantages: (1) The system can test and verify without using real scene devices; (2) Dangerous and extreme situations can be safely replicated in the virtual world; (3) Data can be reused, and the simulation environment can be conveniently repeated until the desired results are achieved; (4) The simulation process can be expanded in the time dimension based on demand.
The current intelligent vehicle technology mainly revolves around the development of single vehicle agents, focusing on environmental perception, path planning, and behavior decision-making without human intervention. Connected vehicles combine communication technology with autonomous driving technology, enabling collaborative perception, planning, and information exchange from local to global, enhancing the reliability and multifunctionality of intelligent traffic systems. However, the diversity, variability, complexity of system elements in connected environments, and the introduction of social signals (Social Signals) caused by “human-vehicle co-driving” make it increasingly difficult to accurately characterize system behavior, leading to new challenges in complex traffic management due to the differences between actual behavior and model behavior, known as the “model gap.”
3 Parallel Driving
The current development of autonomous driving technology is still in the “human-vehicle co-driving” era, where the inclusion of human behavior increases the complexity of intelligent traffic systems. The addition of social signals transitions complex systems from simple physical systems and information-physical systems to Cyber-Physical-Social Systems (CPSS). The emergence of the “model gap” forces us to shift from modeling using the “Newtonian laws” that can control system behavior to the “Merton laws” that can influence system behavior. A typical characteristic of Merton systems is that even given their current state and control conditions, it is impossible to predict the next state of the system precisely. Connected vehicles, as a CPSS system, are also a typical Merton system; the parallel driving theory based on ACP theory, characterized by “vehicle-end perception and cloud-end control,” seeks a good solution for this.
The ACP theory includes Artificial Systems, Computational Experiments, and Parallel Execution, providing an efficient method for solving complex systems, as shown in Figure 12. The parallel driving technology based on CPSS is grounded in the ACP theory. The structure of ACP is as follows:
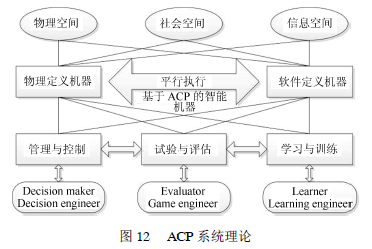
Traditional vehicles are considered software-defined vehicles, while future intelligent connected vehicles will consist of three main components: (1) Vehicle agents (with physical properties); (2) Human driver agents (with physical and cognitive properties); (3) Control agents associated with driving.
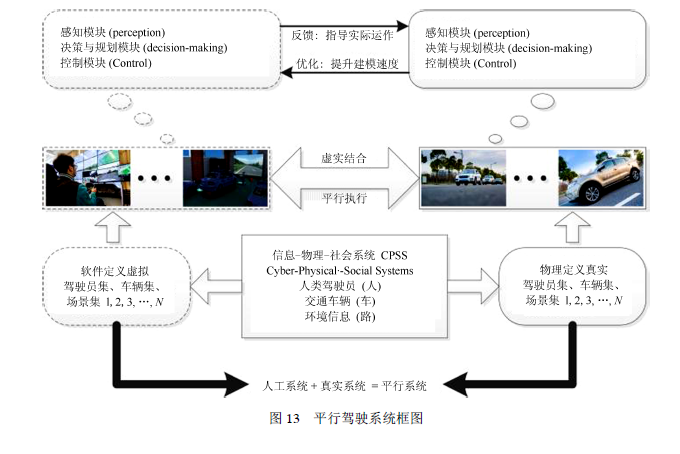
Parallel driving is the next-generation cloud-based connected autonomous driving technology that fully utilizes digital and informational resources, seamlessly connecting information from the cloud, roads, and vehicles. It employs cutting-edge technologies such as parallel vision, parallel perception, parallel learning, parallel planning, and parallel control to connect intelligent vehicles, control platforms, and driving simulators in real-time, enhancing vehicles’ responsiveness to dynamically changing environments, ultimately achieving vehicle-road interaction, multi-vehicle collaboration, parallel control, and safe driving.
The theory of parallel driving is based on Cyber-Physical-Social Systems (CPSS) and combines artificial systems with real systems. It employs the ACP method to achieve:
(1) Use a bottom-up multi-agent approach to model objects and their relationships in artificial scenarios, simulating the dynamic and static characteristics in actual traffic scenarios;
(2) Utilize computational experiments to conduct computational experiments on agents in artificial scenarios, for example, using machine learning methods to evaluate control strategies for lane changes, overtaking, and even rear-end scenarios for connected vehicle agents in virtual environments, analyzing how multi-agent systems interact and collaborate;
(3) Execute control algorithms obtained from computational experiments in both actual and artificial scenarios in parallel, making model training and evaluation online and long-term. Through the virtual-real interaction between artificial and actual systems, the system is continuously optimized.
Parallel driving technology represents a significant transformation of traditional agent-based intelligent vehicle control technology, bringing intelligent vehicles into a virtual world parallel to the real world. The framework for parallel driving, based on CPSS theory, with the basic concept of “simple inside the vehicle, complex outside the vehicle,” utilizes the driving status information of intelligent vehicles and traffic environment information combined with relevant data from virtual systems to analyze and make decisions through big data analysis learning systems, achieving prediction, command, and control of intelligent vehicles.
To understand the structural and functional characteristics of different levels of the Internet of Vehicles (IoV) and their inherent dynamic characteristics, and to provide scientific solutions for system management under mixed traffic forms, WANG et al. extended the ACP method to the IoV field, proposing a new intelligent vehicle network management and control system: the Parallel IoV. The Parallel IoV consists of three steps.
Step 1: Artificial IoV, construction, and cultivation of a