
This article is a featured article from the Kanxue Forum, author ID: Q老Q
1
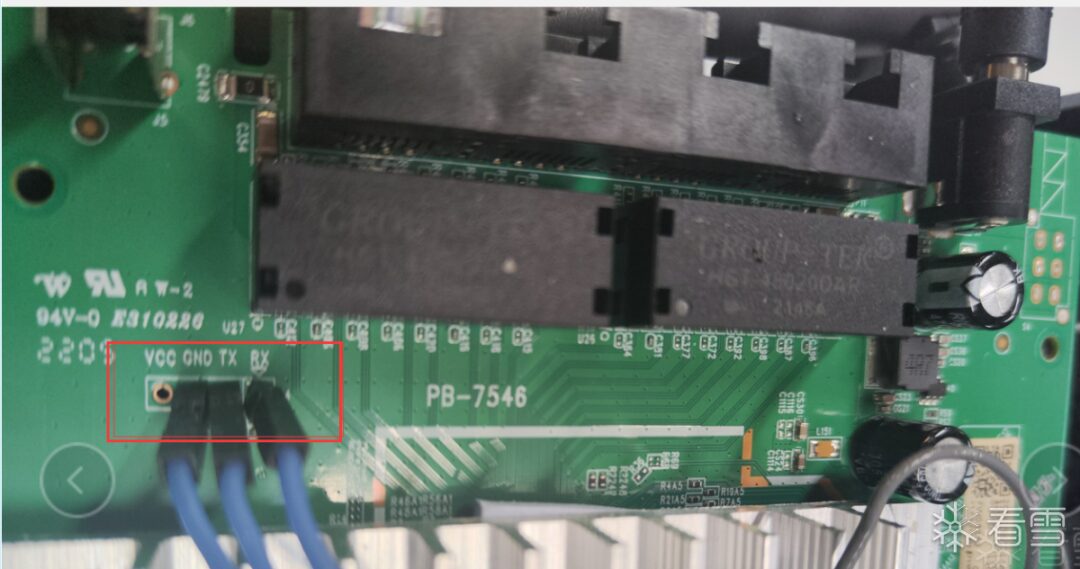
Entering U-Boot Shell from UART
Boot SPI NAND
start read bootheader
start read secondboot
non secure boot
Jump
ddr init enter, rate is 1333 mbps
ddr size is 0x10000000
U-Boot 2013.04 (Feb 14 2022 - 16:16:39)
......
eth0
Hit 1 to upgrade software version
Hit any key to stop autoboot: 1
......
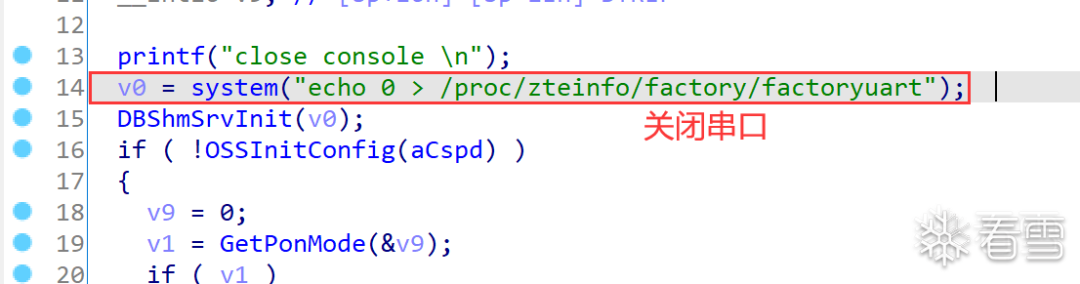
*****************pc start*************************************
echo 5000 > /proc/sys/vm/min_free_kbytes
********************close console=> h? - alias for 'help'
base - print or set address offset
bdinfo - print Board Info structure
boot - boot default, i.e., run 'bootcmd'
bootd - boot default, i.e., run 'bootcmd'
bootk - boot kernel
bootm - boot application image from memory
bootz - boot Linux zImage image from memory
cmp - memory compare
coninfo - print console devices and information
cp - memory copy
dhcp - boot image via network using DHCP/TFTP protocol
downver - upgrade software downloaded from TFTP server
echo - echo args to console
erase - erase FLASH memory
fdt - flattened device tree utility commands
flinfo - print FLASH memory information
go - start application at address 'addr'
gpiotest- gpiotest dir [num] [in/out]
gpiotest value [num] [1/0]
gpiotest gvalue [num]
help - print command description/usage
imxtract- extract a part of a multi-image
itest - return true/false on integer compare
mcupg - multicast upgrade
md - memory display
mii - MII utility commands
mtddebug- mtddebug operate
mtest - simple RAM read/write test
mw - memory write (fill)
nand - NAND sub-system
ping - send ICMP ECHO_REQUEST to network host
printenv- print environment variables
protect - enable or disable FLASH write protection
reset - Perform RESET of the CPU
run - run commands in an environment variables
saveenv - save environment variables to persistent storage
setenv - set environment variables
sleep - delay execution for some times
number - Get or set serial number for zte boards
tftp - boot image via network using TFTP protocol
version - print monitor, compiler and linker version
watchdog- watchdog reset && disable
xmodem - xmodem2
Modify Kernel Boot Parameters
=> printenv
baudrate=115200
bome=aclcle)
root=/dev/mtdblock8 rw
rootfstype=jffs2
mem=256M
single
bootcmd=setenv bootargs console=$(console) root=/dev/mtdblock8 ro rootfstype=jffs2 mem=$(memsize);bootm 0x440001e0;
bootdelay=1
bootfile=uboot.bin
bootloaderfile=bootloader.bin
console=ttyAMA0,115200n8
ethact=eth0
ethaddr=00:41:71:00:00:50
fileaddr=44000000
filesize=13bfb78
gatewayip=192.168.1.1
ipaddr=192.168.1.1
linuzfile=vmlinuz.bin
loadaddr=0x44000000
memsize=256M
nand_erasesize=20000
nand_oobsize=40
nand_writesize=800
netmask=255.255.255.0
netretry=5
serverip=192.168.1.100setenv bootcmd 'setenv bootargs console=$(console) root=/dev/mtdblock8 rw rootfstype=jffs2 mem=$(memsize) init=/bin/sh;bootm 0x440001e0;'=> save
Saving Environment to NAND...
Erasing 0x180000 - 0x200000:<nand_erase_skip_bad_,1560>!
mtdpart=0x1,start=0x0,mtdpartoffset=0x180000,mtdPartsize=0x80000,length=0x80000 [Done]
Writing to Nand:<nand_write_skip_bad_,1455>!
mtdpart=0x1,offset=0x0,mtdpartoffset=0x180000,mtdPartsize=0x80000,length=0x20000 [Done]=> bootm 0x440001e0
Wrong Image Format for bootm command
ERROR: can't get kernel image!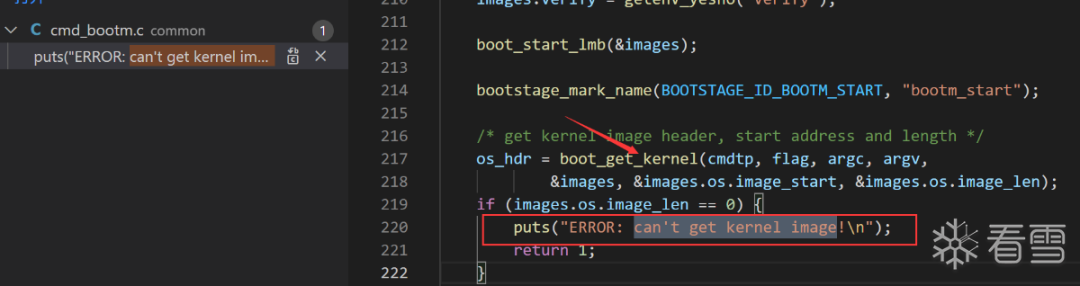
typedef struct image_header {
__be32 ih_magic; /* Image Header Magic Number */
__be32 ih_hcrc; /* Image Header CRC Checksum */
__be32 ih_time; /* Image Creation Timestamp */
__be32 ih_size; /* Image Data Size */
__be32 ih_load; /* Data Load Address */
__be32 ih_ep; /* Entry Point Address */
__be32 ih_dcrc; /* Image Data CRC Checksum */
uint8_t ih_os; /* Operating System */
uint8_t ih_arch; /* CPU architecture */
uint8_t ih_type; /* Image Type */
uint8_t ih_comp; /* Compression Type */
uint8_t ih_name[IH_NMLEN]; /* Image Name */
} image_header_t;
#define IH_MAGIC 0x27051956 /* Image Magic Number */
#define IH_NMLEN 32 /* Image Name Length */
=> md.b 440001e0 100
440001e0: ff d7 ff ff bf fe fd f7 7f ff 7f df 5f bd ff ff ............_...
440001f0: f6 a2 b7 f7 5f fe fe fe 77 f5 db ff 3f bf fa 76 ...._...w...?..v
44000200: fc ed ef fd 7f ff ff fd 7b ee ff ee fd 7b ff 75 ........{....{.u
44000210: 67 7d e8 bf ee ef ed a1 cd fb 63 fe 67 ee f7 9e g}........c.g...
44000220: f3 df af f5 ea ff f7 fb 78 77 ea fd df ff ef fb ........xw......
44000230: d3 dd e9 ff b3 3f e7 ef 76 f6 f6 ed cf b3 bd fb .....?..v.......
44000240: bf eb 97 fb 9f ef ff ef d9 59 b9 3e 5f 3f ff 32 .........Y.>_?.20x000000000000-0x000008000000 : "whole flash"
0x000000000000-0x000000200000 : "u-boot"
0x000006800000-0x000006b00000 : "parameter tags"
0x000000200000-0x000000700000 : "kernel0"
0x000000700000-0x000000c00000 : "kernel1"
0x000000c00000-0x000001400000 : "usercfg"
0x000001400000-0x000001500000 : "others"
0x000001500000-0x000001800000 : "wlan"
0x000001800000-0x000003800000 : "rootfs0"
0x000003800000-0x000005800000 : "rootfs1"
0x000005800000-0x000006000000 : "framework"
0x000006000000-0x000006800000 : "framework1"
0x000006b00000-0x000008000000 : "apps"=> nand dump 0x200000
Page 00200000 dump: 99 99 99 99 44 44 44 44 55 55 55 55 aa aa aa aa 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 56 31 2e 30 2e 31 2e 32 32 30 33 31 35 2e 31 37 30 39 33 33 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 01 00 00 00 00 5a 64 01 17 58 24 00 e0 01 00 00 dc e0 50 82 00 00 3c 01 00 5a 24 00 d2 2c 67 09 00 00 20 00 00 00 50 00 00 00 80 01 00 00 00 02 00 00 70 00 00 00 50 00 00 00 80 03 00 00 00 02 5a 58 49 43 20 33 36 30 54 36 47 56 32 20 55 4e 49 20 56 31 2e 30 2e 31 2e 32 32 30 33 31 35 2e 31 37 30 39 33 33 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 04 00 00 5a 60 01 31 52 b8 ea 56 32 5f 56 32 2e 00 00 00 00 00 00 00 00 00 00 00 00 00 00 01 00 00 00 47 9b 29 1d 32 30 32 32 30 33 32 31 31 38 32 35 32 31 00 00 00 00 00 00 ff ff ff ff ff ff ff ff 00 00 00 10 ff ff 01 00 56 31 2e 30 00 00 00 00 00 00 00 00 00 00 00 00 33 36 30 54 36 47 56 32 00 00 00 00 00 00 00 00 15 56 24 56 5a 58 30 31 03 30 00 00 00 e0 00 02 43 57 46 57 31 37 30 33 32 38 31 30 30 31 00 00 ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff ff 27 05 19 56 3c 35 3b 72 62 38 52 83 00 24 57 d7 40 00 80 00 40 00 80 00 cc 1f fd e3 05 02 02 00 4c 69 6e 75 78 20 4b 65 72 6e 65 6c 20 49 6d 61nand read - addr off|partition size =>nand read 0x44000000 0x200000 500000
NAND read: device 0 offset 0x200000, size 0x500000 5242880 bytes read: OK=> md.b 0x440001e0
60440001e0: 27 05 19 56 3c 35 3b 72 62 38 52 83 00 24 57 d7 '..V<5;rb8R..$W.
440001f0: 40 00 80 00 40 00 80 00 cc 1f fd e3 05 02 02 00 @...@...........
44000200: 4c 69 6e 75 78 20 4b 65 72 6e 65 6c 20 49 6d 61 Linux Kernel Ima
44000210: 67 65 00 00 00 00 00 00 00 00 00 00 00 00 00 00 ge..............
44000220: 00 00 a0 e1 00 00 a0 e1 00 00 a0 e1 00 00 a0 e1 ................
44000230: 00 00 a0 e1 00 00 a0 e1 00 00 a0 e1 00 00 a0 e1 ................=> bootm 0x440001e0
## Booting kernel from Legacy Image at 440001e0 ... Image Name: Linux Kernel Image Image Type: ARM Linux Kernel Image (uncompressed) Data Size: 2381783 Bytes = 2.3 MiB Load Address: 40008000 Entry Point: 40008000 Verifying Checksum ... OK Loading Kernel Image ... OK
OK----------------------|-->setup versioninfo tag... Starting kernel ...Set_Trap_Pkt_Pps_Limit is NULL.
Set_Trap_Pkt_Pps_Limit is NULL.
VFS: Mounted root (jffs2 filesystem) on device 31:9.
Freeing unused kernel memory: 176K (c05b4000 - c05e0000)
This architecture does not have kernel memory protection.
Kernel panic - not syncing: Requested init /bin/sh; failed (error -2).
CPU: 1 PID: 1 Comm: swapper/0 Not tainted 4.1.25 #23
Setting Up TFTP Communication Environment in U-Boot
sudo apt install tftpd-hpasudo systemctl status tftpd-hpa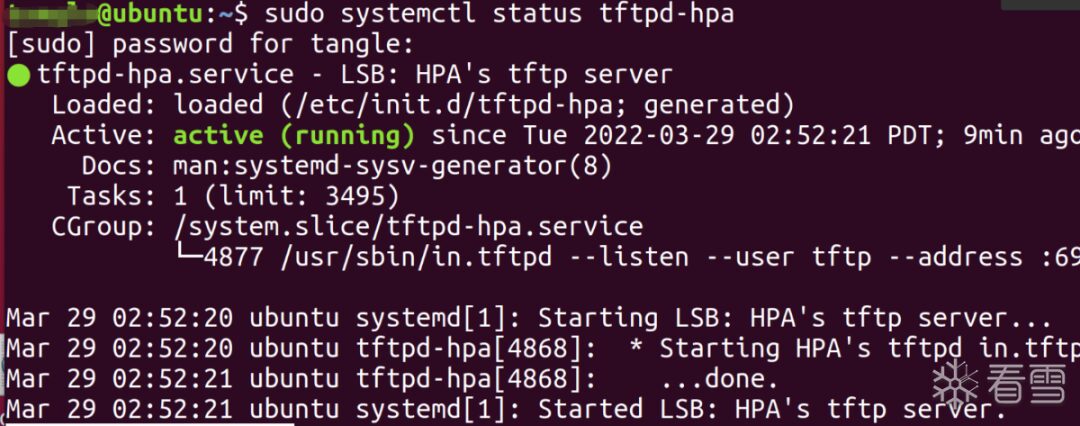
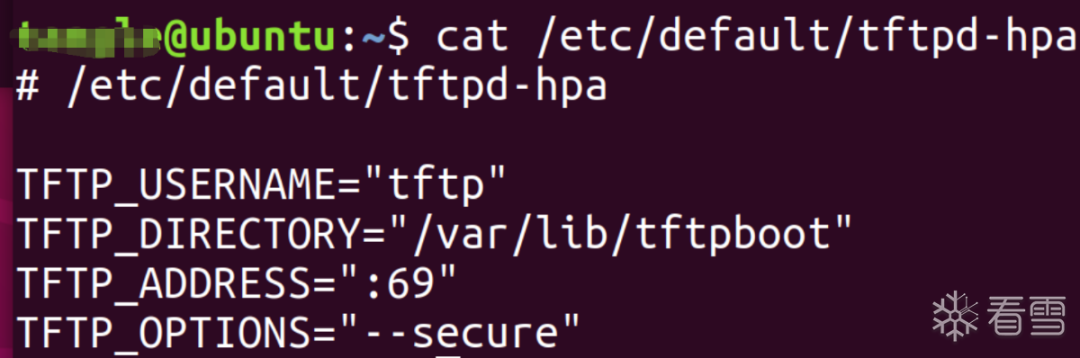
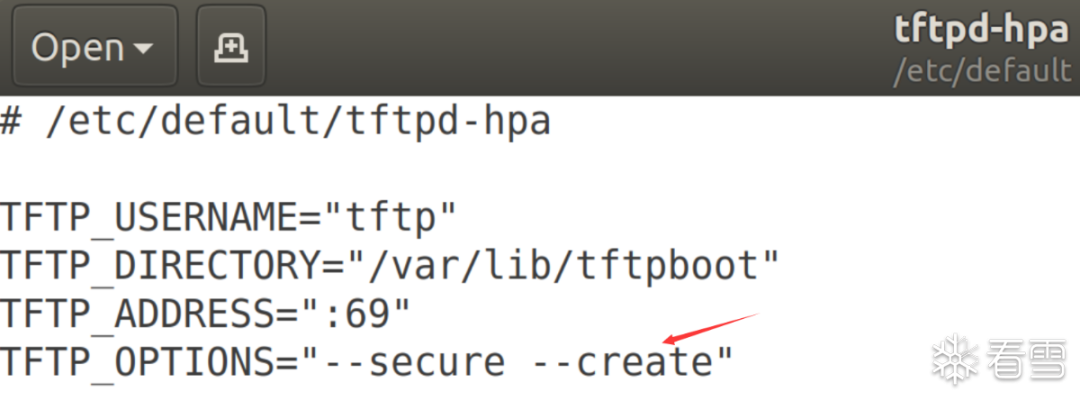
chmod 777 /var/lib/tftp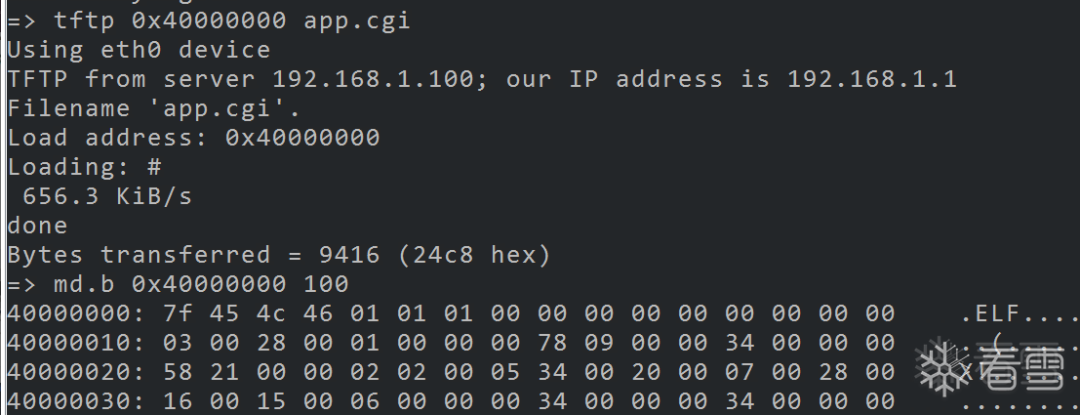
4
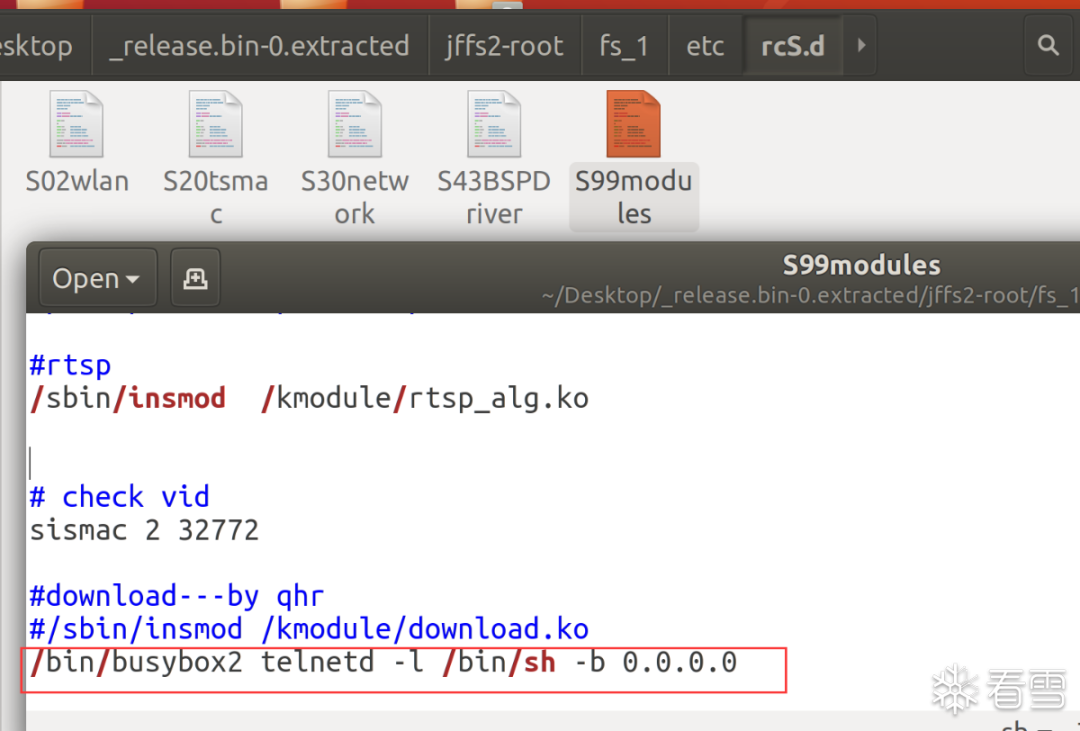
Modify Filesystem to Enter Linux Shell
mkfs.jffs2 -d ./fs_1/ -l -e 0x20000 -o jffs2.img --no-cleanmarkers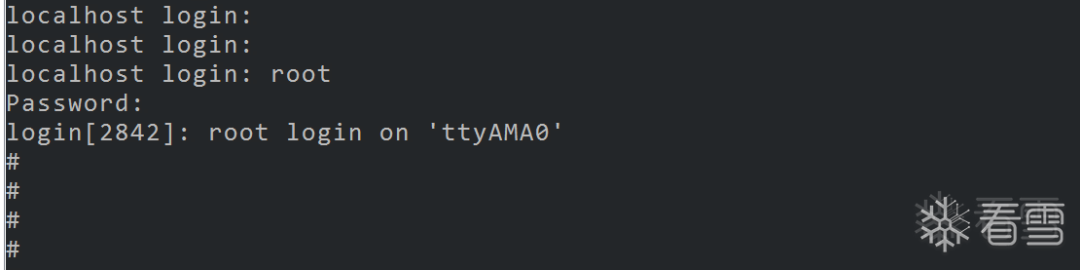
5
Porting Telnet Server
objdump -s --section=.comment Simulator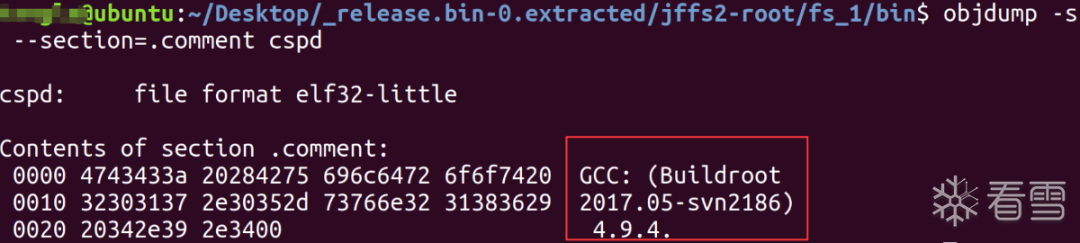
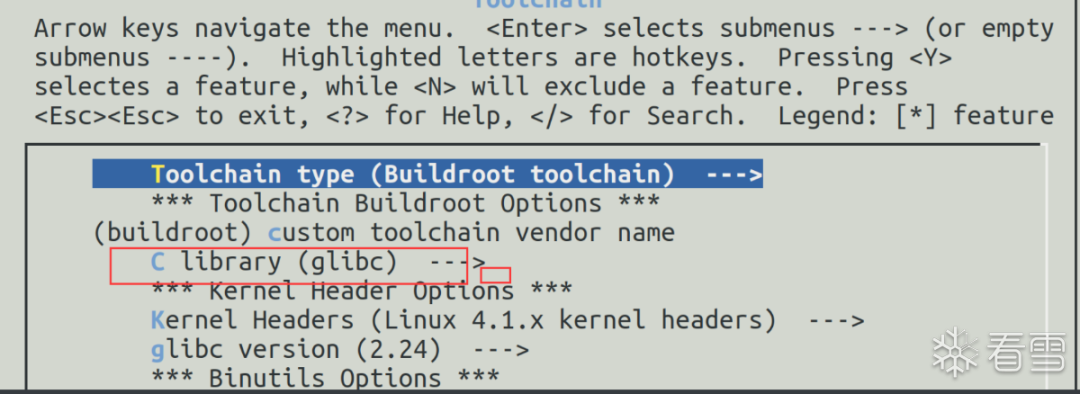
make menuconfig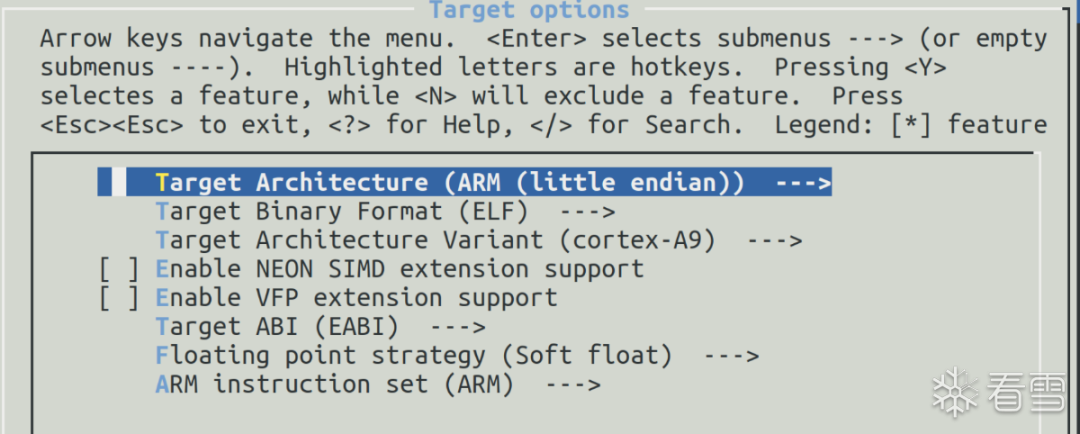

make busybox-menuconfig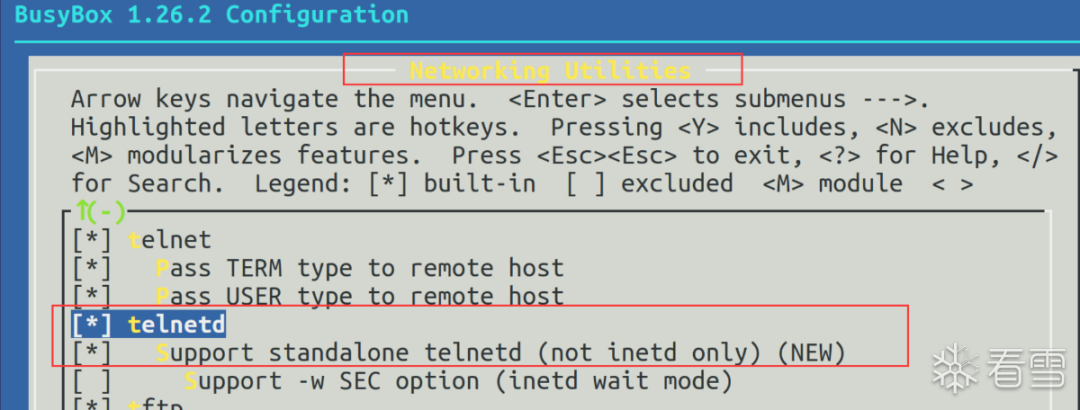

6
Summary

Kanxue ID: Q老Q
https://bbs.pediy.com/user-home-839055.htm

# Previous Recommendations
1. PWN from Experiment to Principle of Heap and UAF
2. Analysis of Frida InlineHook Principle and Simple Design of AArch64 InlineHook Tool
3. PWN Study Notes [Format String Vulnerability Practice]
4. Analysis of the Symbol Recovery Process of Il2Cpp
5. Record a Vulnerability Discovery of a Security Product
6. CVE-2016-3309 Privilege Escalation Vulnerability Study Notes

Share
Like
Watching