In the field of microcontroller (MCU) development, developers often face architectural choices: whether to adopt a bare-metal system or a real-time operating system (RTOS). Below, we will analyze the applicable scenarios for both options through C language code examples and system flowcharts.
1. Applicable Scenarios for Bare-Metal Systems
1.1 Resource-Constrained Projects
When MCU resources are limited (ROM<32KB, RAM<4KB), such as in the STM32F030 series:
// Typical bare-metal system structure
int main() {
hardware_init();
while(1) {
read_sensors(); // Sensor reading
process_data(); // Data processing
control_actuators(); // Actuator control
handle_interrupts(); // Interrupt handling
}
}Flowchart: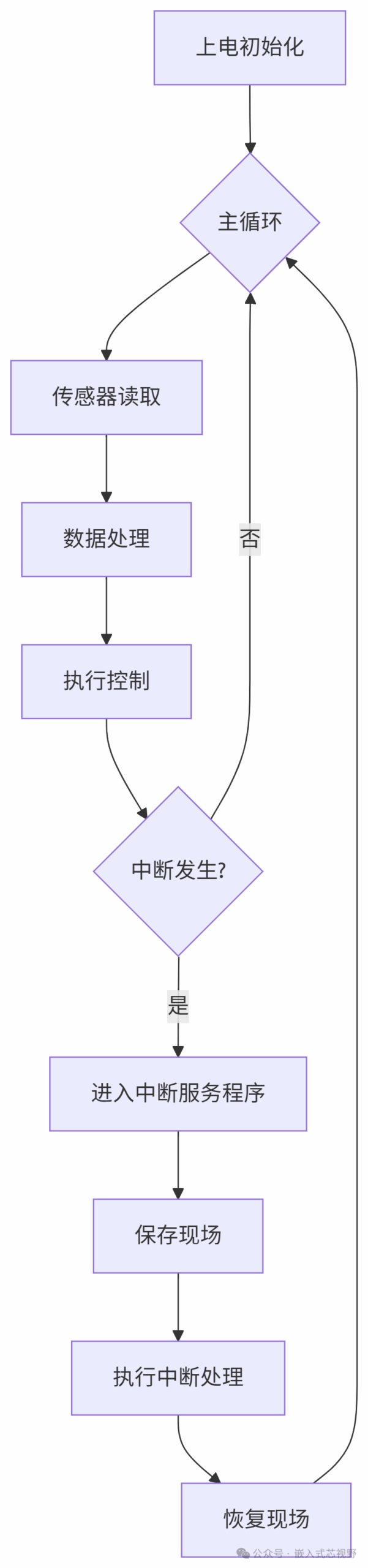
1.2 Single-Task Scenarios
Suitable for simple devices controlled by state machines (e.g., thermostats):
enum states { IDLE, HEATING, COOLING };
enum states current_state = IDLE;
void state_machine() {
switch(current_state) {
case IDLE:
if(temp < target) current_state = HEATING;
break;
case HEATING:
// Heating logic
break;
// ...other states
}
}1.3 Hard Real-Time Requirements
Industrial control systems requiring microsecond-level response:
void TIM1_IRQHandler() { // Timer interrupt
static uint32_t counter = 0;
if(counter++ >= 1000) {
emergency_stop(); // Execute safety operation precisely
counter = 0;
}
}2. Applicable Scenarios for Operating Systems
2.1 Multi-Tasking Concurrent Needs
Example of a smart home gateway using FreeRTOS:
void vSensorTask(void *pvParams) {
while(1) {
xQueueSend(sensor_queue, &sensor_data, portMAX_DELAY);
vTaskDelay(pdMS_TO_TICKS(100));
}
}
void vNetworkTask(void *pvParams) {
while(1) {
xQueueReceive(sensor_queue, &data, portMAX_DELAY);
send_to_cloud(data);
}
}
int main() {
xTaskCreate(vSensorTask, "Sensor", 128, NULL, 2, NULL);
xTaskCreate(vNetworkTask, "Network", 256, NULL, 1, NULL);
vTaskStartScheduler();
}Flowchart: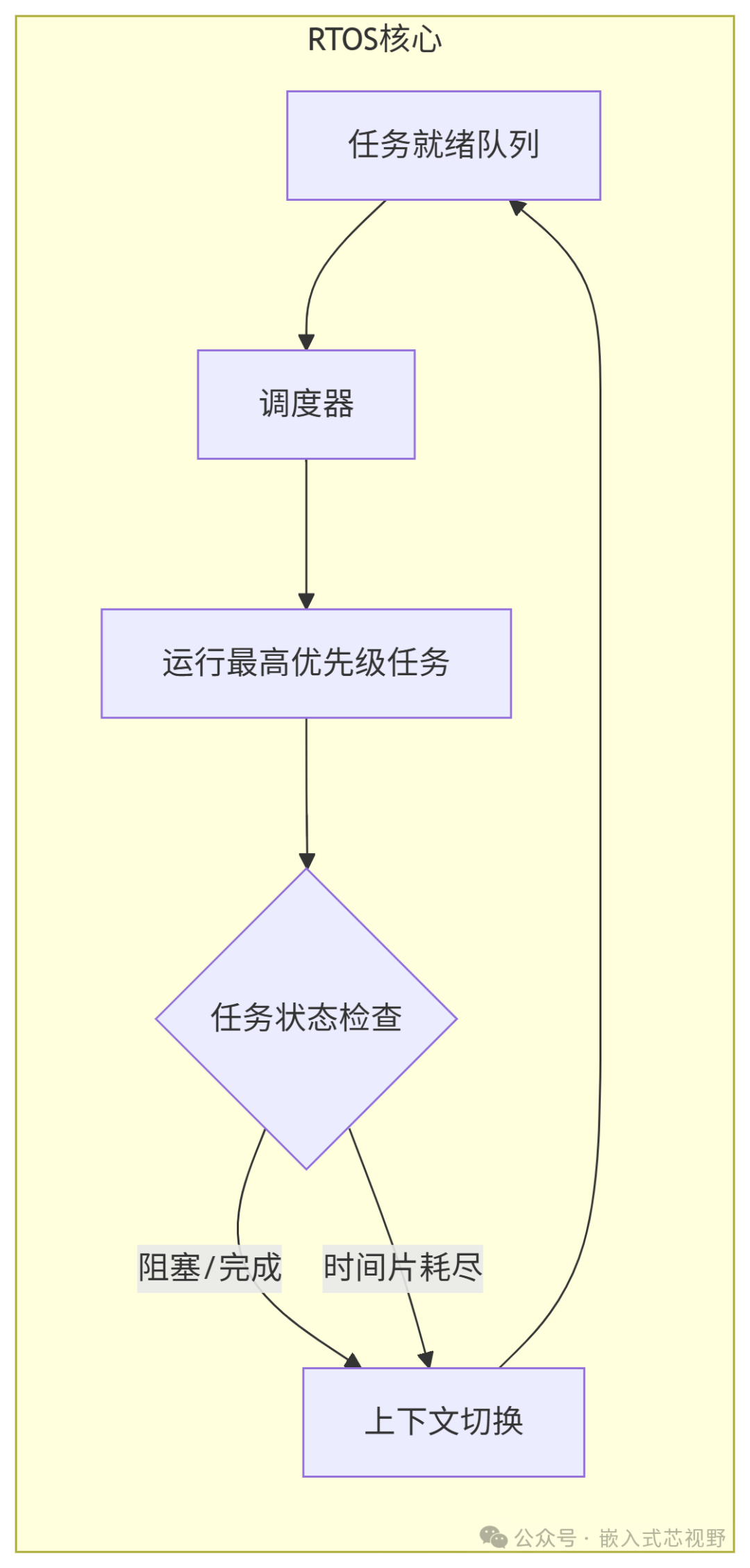
2.2 Complex System Management
IoT devices requiring a file system and TCP/IP stack:
void http_server_task() {
lwip_init();
while(1) {
process_http_request(); // Using OS-provided socket API
vTaskDelay(10);
}
}2.3 Dynamic Task Creation
Industrial controllers supporting functional expansion:
void create_new_task() {
xTaskCreate(dynamic_task, "DynTask", 256, NULL, 3, &xHandle);
}3. Comparison Decision Matrix
| Evaluation Dimension | Bare-Metal System | RTOS System |
|---|---|---|
| Memory Usage | Typically <5KB | Typically >10KB |
| Task Response Time | Good determinism (μs level) | Scheduling delay (ms level) |
| Development Complexity | Simple (linear programming) | Requires understanding of task model |
| System Scalability | Limited | Easy to expand |
| Typical Application Scenarios | Power tools, simple controllers | Smart home, industrial gateways |
4. Hybrid Architecture Practices
4.1 Time-Critical Hybrid Solutions
void TIM2_IRQHandler() { // High priority interrupt
critical_task(); // Bare-metal direct handling
}
void rtos_task() { // RTOS task
noncritical_task();
}5. Selection Practice Recommendations
-
Use bare-metal to validate core algorithms in the early stages of the project
-
Consider migrating to RTOS when the following situations arise:
-
More than 5 functional modules
-
Need for third-party protocol stack integration
-
Priority conflict issues arise
Use SysTick for benchmarking:
void SysTick_Handler() {
static uint32_t ticks = 0;
ticks++;
if(ticks%1000 == 0) {
check_system_load(); // Evaluate system load
}
}