Infrared detection technology and autonomous driving vision systems are core areas of modern information perception, facing long-standing performance bottlenecks in fundamental devices. In the field of infrared detection, the challenge of balancing dark current suppression and room temperature operation limits the sensitivity and practical application of detectors. In the autonomous driving sector, issues such as image noise and spectral interference caused by complex lighting environments directly affect the visual system’s ability to accurately analyze driving scenes and make real-time decisions. How to break through these limitations through innovative design of materials and devices remains a challenge for the scientific community.
Recently, Professor Zou Xuming, Associate Professor Lv Yawei, Professor Liao Lei from the School of Physics and Microelectronics at Hunan University, and their collaborative team proposed an ultra-thin polar barrier (UTPB) strategy, constructing a WSe2/H2O/PdSe2 heterojunction detector with sub-nanometer polarized water intercalation. This device exhibits a non-conductive dark state at room temperature, which can be rapidly activated by the incidence of minute photons, demonstrating excellent wide-spectrum infrared response performance, and is expected to promote the development of the next generation of infrared detectors.

The challenges of unipolar barriers and the concept of ultra-thin polar barriers (UTPB).
At the same time, Professor Zou Xuming from the School of Physics and Microelectronics, Associate Professor Hong Qinghui from the School of Information Science and Engineering, Professor Liao Lei from the School of Semiconductors, and Professor Chai Yang from the Hong Kong Polytechnic University, along with their collaborative team, proposed a visual fusion strategy to meet the perception needs of autonomous driving in complex light environments. This strategy involves the synergistic design of dielectric layers and channel layers in heterostructures, enabling visual sensors to achieve non-volatile positive/negative light responses in the near-infrared/visible light spectrum. They also constructed a fully circuit-simulated visual system for autonomous driving. By combining the visual fusion strategy with edge extraction circuit design, the system integrates perception, fusion, computation, and decision-making functions, breaking through the spectral limitations of traditional visual perception, achieving a target recognition accuracy of up to 99.0% in typical driving scenarios, significantly enhancing environmental perception capabilities and driving safety.
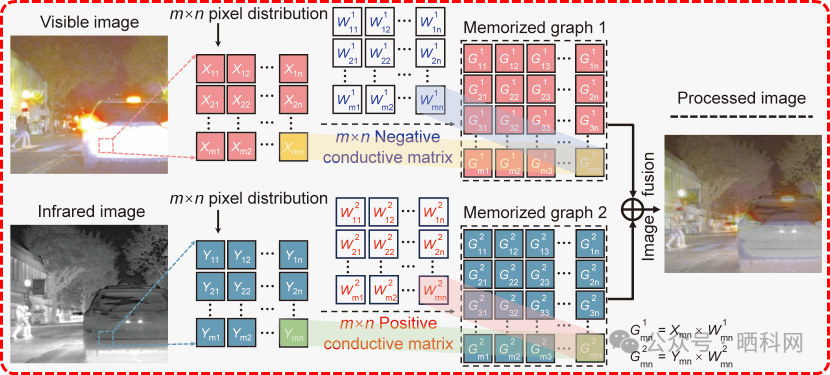
Visual sensors for image fusion and their corresponding working mechanisms.
The two research results were published in academic journals Nature Communications and National Science Review under the titles “Sub-pA dark current infrared photodetection enabled by polarized water-intercalated heterojunctions” and “Rational design of a vision fusion system with visible and near-infrared spectral integration for improved environmental perception.” Hunan University is the first communication unit, and this work was supported by the National Key R&D Program, the National Natural Science Foundation, and the Hunan Provincial Natural Science Foundation.
Source: Hunan University


