▍1. The Shift from Distributed to Domain-Centralized Architecture in Automotive EE, Driving Upgrades in Communication Architecture
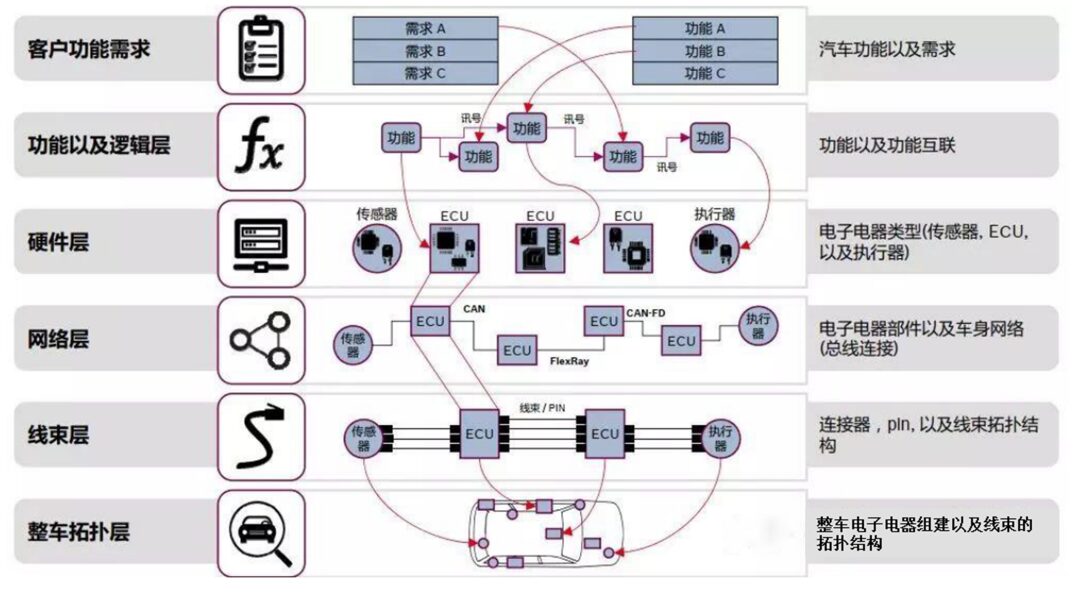
The concept of E/E architecture was first proposed by Delphi in 2007, specifically integrating the sensors, central processors, electronic and electrical distribution systems, and software and hardware in automobiles under specific constraints such as functional requirements, regulations, and design requirements; through this structure, information from the powertrain, transmission system, infotainment system, etc., is transformed into actual physical layouts for power distribution, signal networks, data networks, diagnostics, power management, and other electronic and electrical solutions.
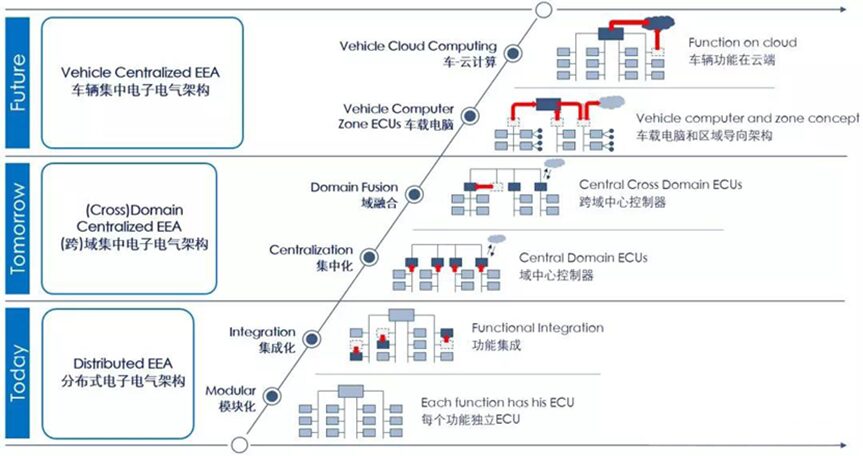
Development from distributed ECUs towards domain control/centralized architecture. According to Bosch’s definition of E/E architecture, the upgrade path for automotive E/E architecture is characterized by distributed (modular → integrated), domain centralized (domain control concentration → cross-domain integration), and centralized (on-board computer → vehicle-cloud computing).
This means that distributed ECUs (each function corresponds to one ECU) gradually modularize and integrate towards domain controllers (generally categorized by power domain, chassis domain, body domain, infotainment domain, and ADAS domain), then certain domains begin to integrate across domains (for example, functional safety and information security similarities between chassis and power domains), and evolve into a centralized computing platform (i.e., one computer), ultimately advancing towards cloud computing and on-board computing (central computing platform). Among these, on-board computing is mainly used for real-time processing within the vehicle, while cloud computing serves as a supplement to on-board computing, providing non-real-time (for example, certain cabin scenarios may allow microsecond-level delays) data interaction and computational processing for smart vehicles.
Currently, we are in the process of transitioning from the past distributed EE architecture to a domain-centralized EE architecture, and this transition is expected to be completed around 2025. After 2025, the era of cross-domain integration will begin, marking the transition to the era of “Central + Zonal” (Central & Zonal) computing EE architecture.
Bosch’s Views on the Future Development Trends of Automotive Electronic and Electrical Architecture
1. Currently, the first type of E/E architecture being applied by automotive companies adopts a distributed design, divided into modular and integrated stages:
Modular Stage: Each function of the vehicle has an independent ECU, and most vehicles are currently in this stage;
Integrated Stage: Vehicle design begins to integrate functions, leading to the integration of ECUs.
2. In the future, automotive companies will adopt the second type of E/E architecture, which uses (cross) domain centralized design, divided into centralized and domain integration stages. For example, Volkswagen aims to reduce the complexity of vehicle software by “reducing from 70 ECUs from 200 different suppliers to three central on-board computers”:
Centralized Stage: Indicates the emergence of domain central controllers;
Domain Integration Stage: Correspondingly, cross-domain central controllers begin to appear. The Tesla Model 3 is a representative model of the domain integration stage.
3. In the future, E/E architecture will evolve into a third type of architecture, namely centralized vehicle E/E architecture, divided into on-board computers and vehicle-cloud computing:
On-board Computer Stage: Adopts on-board computers and zonal-oriented architecture;
Vehicle-Cloud Computing Stage: Vehicle functions are cloud-based.
Advantages After Computing Centralization:
-
Hardware Architecture Upgrade: a. Reduces redundancy in internal computing power, avoids ECU quantity inflation, and reduces total design computing power demand; b. Traditional distributed architectures are difficult to achieve real-time interaction, while centralized architectures can unify interactions and realize collaborative functions across the vehicle; c. After centralization, harnesses are shortened, and overall vehicle weight is reduced.
-
Software Architecture Upgrade: a. In distributed architectures, software and hardware are integrated, and automotive companies do not have the authority to maintain and update ECUs, thus unable to resolve issues through subsequent OTA updates. After transitioning to a centralized architecture, software and hardware can be decoupled, allowing continuous improvements in vehicle functions through system upgrades (OTA), with software partially realizing the functions of traditional 4S stores, continuously providing operation and service after vehicle delivery; b. Once a perception layer is formed, the collected data can be shared. After decoupling software and hardware, multiple applications can share one set of hardware, effectively reducing hardware quantity.
-
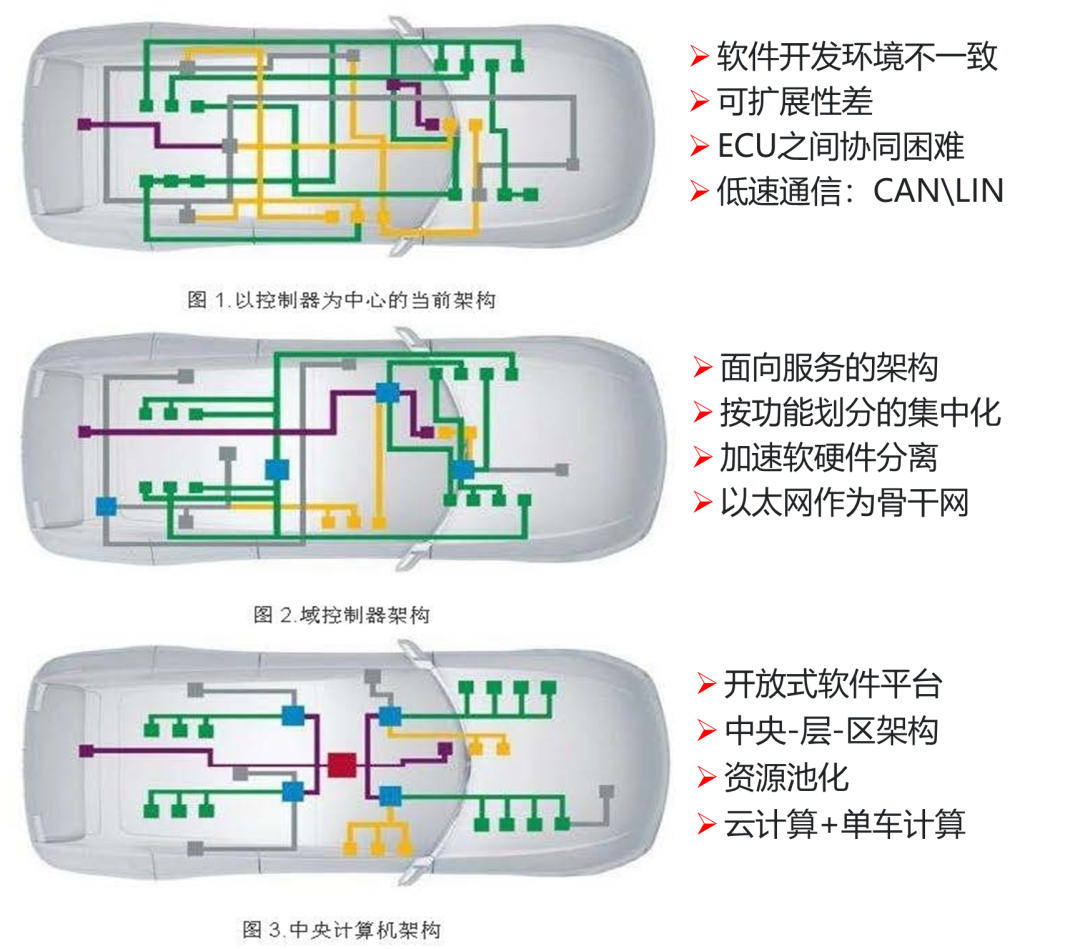
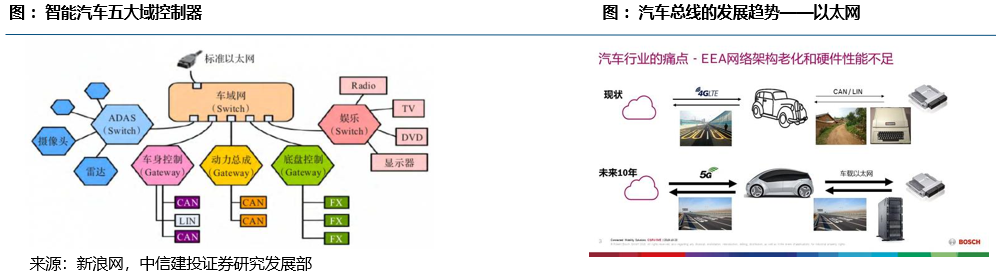
Communication Architecture Upgrade: Adopts high-speed Ethernet to replace CAN bus, supporting the addition of more vehicle networking and ADAS functions for future vehicles.
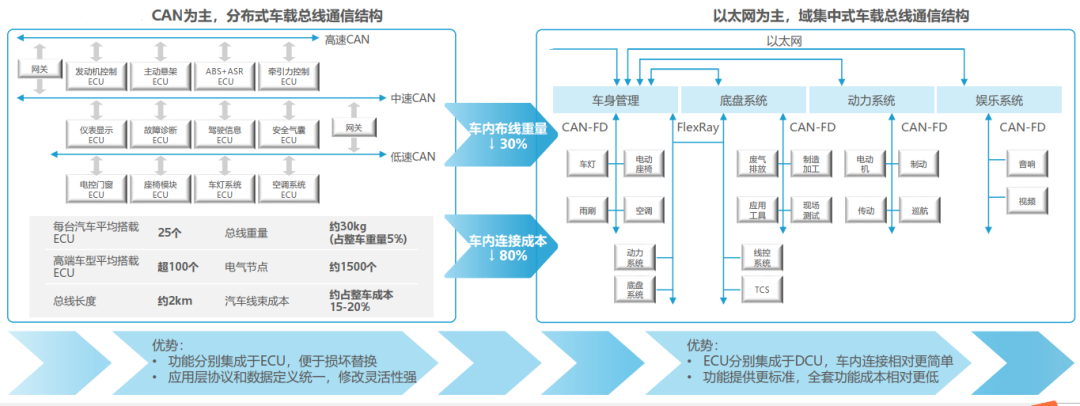
Currently, vehicle bus communication is gradually transitioning from a distributed architecture dominated by “CAN bus with other buses as supplements” to a domain-centralized architecture dominated by “Ethernet with CAN and other buses as supplements.”
In the CAN bus-dominated distributed bus architecture, functions are integrated separately, compared to the original point-to-point communication, the integration degree of functions is higher, making it easier for repairs and replacements after damage. Moreover, application layer protocols and data definitions are unified, allowing for strong modification flexibility. However, the distributed architecture still faces many issues, such as a high number of ECUs, numerous electrical nodes, long and heavy harnesses, and the resulting high harness costs.
In the Ethernet-dominated domain-centralized bus architecture, Ethernet serves as the vehicle’s backbone network, while other communications combine different communication technologies’ functional characteristics, using CAN-FD, FlexRay, etc. The current basic form of in-vehicle bus communication is “multi-technology coexistence, centralized gateway control,” which can effectively reduce in-vehicle harness weight, corresponding connection costs, and labor costs. Overall design is more conducive to standardization on vehicles, and the cost of a fully equipped system is lower compared to distributed architecture.
▍2. Automotive Intelligent Functions and Required Vehicle Communication Technologies
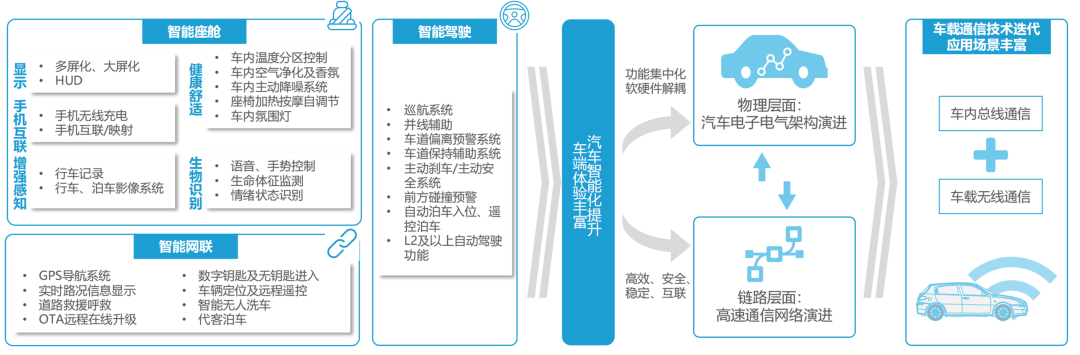
With the increasing intelligence of vehicles, the functional experience of smart cockpits, smart connectivity, and smart driving is becoming increasingly rich, with user experience and technological iteration mutually driving further technical evolution at the physical and link layers. At the physical level, automotive electronic and electrical architectures are continuously evolving towards lighter designs to adapt to the trends of decoupling software and hardware and concentrating functions by domain; at the link layer, high-speed communication networks are evolving towards being more efficient, safer, more stable, and with more interconnected devices, providing more reliable technical support for vehicle-side applications.
As the technologies at the physical and link layers improve overall, the vehicle communication technologies required for smart electric vehicles are also iterating further, with improvements in both in-vehicle bus communication and vehicle wireless communication, making smart electric vehicles a new access point for the Internet of Everything and a moving database.
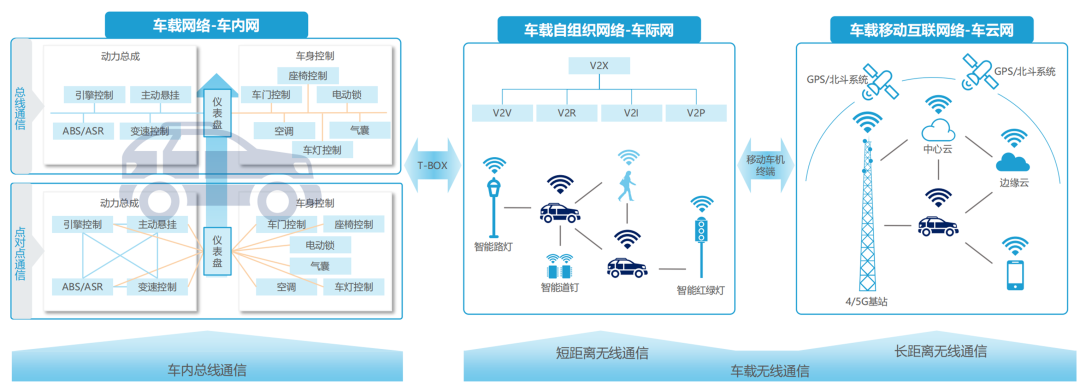
Vehicle communication technology can be divided into in-vehicle bus communication and vehicle wireless communication, where:
In-Vehicle Bus Communication: Uses the vehicle’s wiring harness as a medium to connect various domain controllers, gateways, and MCUs within the vehicle at different forms and speeds, forming the on-board network, i.e., the in-vehicle network.
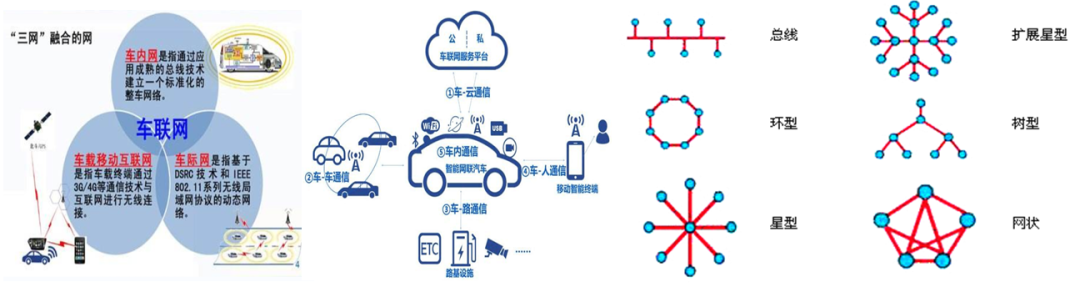
Vehicle Wireless Communication: Can be divided into short-range wireless communication and long-range wireless communication based on communication distance. Short-range wireless communication generally does not exceed one kilometer, characterized by low cost, low power consumption, and peer-to-peer communication, implementing functions such as remote control, interconnection, and identification in various forms, ultimately achieving interconnection between vehicle systems and roadside, as well as weak traffic participants, forming a vehicle self-organizing network, i.e., V2V network. Long-range wireless communication technologies consist of mobile communication technologies, microwave communication technologies, and satellite communication technologies. Currently, mobile communication technologies are dominated by 4G, gradually transitioning to 5G, with vehicle systems, signal base stations, cloud services, mobile device terminals, and satellite positioning systems together forming the vehicle mobile interconnection network, i.e., vehicle-cloud network.
The topology of automotive on-board networks is generally categorized into bus, star, and ring structures.
2.1 In-Vehicle Bus Communication Technology
The evolution of in-vehicle bus communication is based on the increased electrification of vehicles, with the connection range evolving from basic control systems to major control systems, and now to connections between various electronic control systems. Currently, smart electric vehicles are equipped with multiple ECUs, each controlling different functional modules, with each module directly or indirectly connected to the bus.
Bus communication technologies include CAN, CAN-FD, LIN, MOST, FlexRay, and on-board Ethernet, etc. Different communication technologies have their strengths in terms of speed, cost, scalability, and anti-interference, thus being comprehensively applied in different vehicle applications. The CAN bus is currently used in fields such as air conditioning, displays, and fault diagnostics, and will extend to more backbone networks. The LIN bus is often used in stable transmission locations with lower speed requirements such as lighting and seating. On-board Ethernet, with advantages of light weight, high speed, and strong compatibility, is currently applied in the connection of key components such as cameras and LiDAR, but due to cost constraints, mid-to-high-end models will be the first to achieve large-scale application of on-board Ethernet.
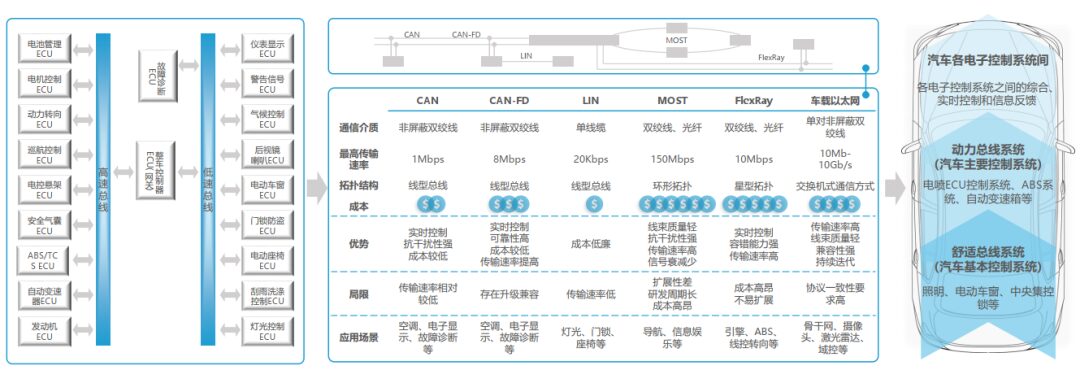
Basic architecture, technology comparison, and evolution history of in-vehicle bus communication
2.2 Vehicle Wireless Communication Technology
In vehicle wireless communication technology, short-range wireless communication has faster transmission rates and is often used for data transmission and connection of devices close to the vehicle body, such as vehicle positioning and unlocking; actual application ranges often overlap, with Tier 1 and OEMs also tending towards moderate redundancy configurations to ensure a more stable experience. Long-range wireless communication generally refers to mobile communication networks, represented by 4G/5G, primarily providing communication and navigation functions, serving intelligent driving and cockpit functions.
Different communication technologies have overlapping coverage and capabilities, and in practical vehicle applications, it is not the case that “different technologies do not interfere with each other.” For example, the vehicle T-BOX is equipped with multiple communication capabilities, and the vehicle functions perceived by users are actually the result of multiple communication capabilities working together. According to Yiou Research Institute, we are still in the phase of “technology leading demand,” where the emergence of new technologies will not abruptly replace traditional technologies but will inspire more creative functional experiences while multiple technologies coexist.
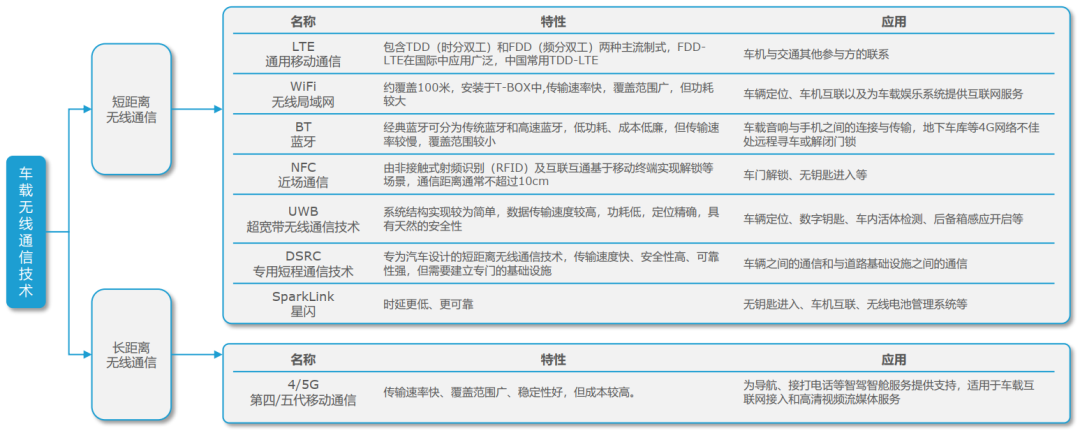
Characteristics and applications of vehicle wireless communication technology
▍3. Trends in Vehicle Communication Development
Vehicle communication technology has different development paths based on technical characteristics and participating parties. In the next three years, mainstream vehicle communication technologies will trend towards personalized and standardized developments in different directions, overall transitioning from technical hardware to service platforms, supporting more service experiences with a single set of hardware.
Vehicle Ethernet will tend towards forming a more standardized vehicle communication architecture with the development of Ethernet chips, wiring harnesses, etc.; the Star Flash technology led by Huawei’s Star Flash Alliance will gather industry strength, and it is expected to produce more information exchange functions after mass production on vehicles; C-V2X also requires cooperation from all parties and industry alliances to promote its development. With the evolution of high-level assisted driving functions, C-V2X is expected to become a standard feature for intelligent driving, forming a higher-level smart traffic system with roads and cities; UWB is currently still in a developmental phase, but based on its high reusability, it is expected to be widely adopted in the future as vehicle functions become richer and technology costs decrease, supporting more services for near-field communication both inside and outside the vehicle.
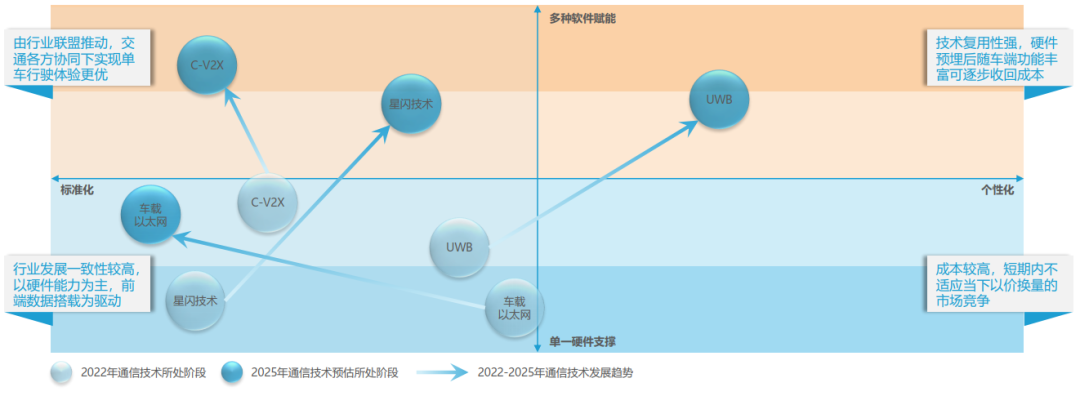
Trends in mainstream vehicle communication technology development by 2025
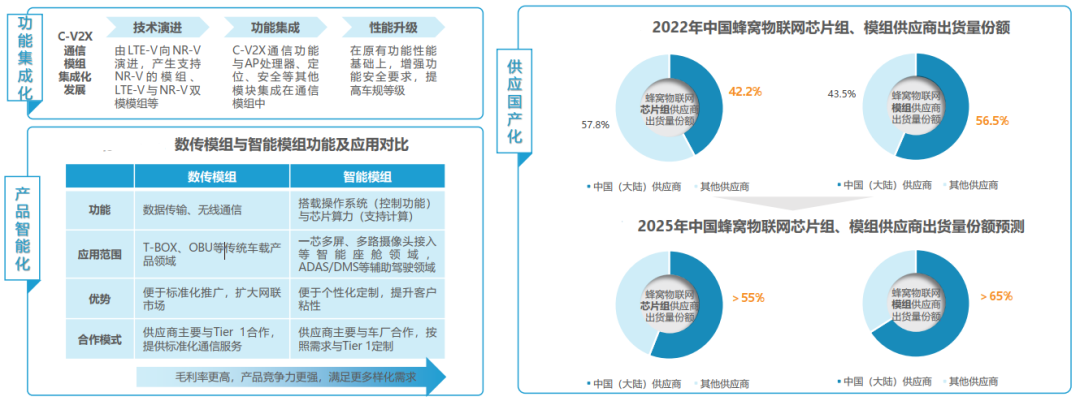
The vehicle communication industry is both a pillar industry for the overall development of smart electric vehicles and a connecting industry for various links inside and outside the vehicle. According to Yiou Research Institute, the future of the vehicle communication industry will trend towards functional integration, product intelligence, and domestic supply.
Taking the key implementing component of the vehicle communication industry—communication modules—as an example, C-V2X communication modules have undergone technological evolution, functional integration, and performance upgrades, iterating into more diverse product forms. Traditional data transmission modules will further evolve into intelligent modules. With the evolution of vehicle functions and the reduction of production costs, intelligent connectivity will develop between standardized promotion and personalized customization, leading to more forms of industry cooperation. Relying on the cost advantages of the Chinese market, engineer dividends, and huge market potential, Chinese cellular IoT chip and module suppliers are rising strongly, gradually occupying a larger share of the global market.
Author | Abao


Open and Inclusive, Collaborate

Share Opportunities and Outcomes of Industrial Change
Contact Us
Beijing High-Level Autonomous Driving Demonstration Zone
Office: 010-67865603
Industry Policy and Scene Implementation: [email protected]
Vehicle Testing and Supervision: [email protected]
Media Cooperation: [email protected]