In recent years, popular topics include 5G, vehicle networking, and autonomous driving. However, after extensive engagement with this industry, especially through bilateral cooperation with major automakers in 5GAA, it seems that this topic is still somewhat controversial, and it is necessary to clarify and discuss it.
First, let’s introduce 5GAA: On September 28, 2016, Huawei, Audi, BMW, Daimler, Vodafone, Ericsson, Intel, Nokia, and Qualcomm announced the establishment of the 5G Automotive Association (5GAA). These companies will collaborate on the development, testing, and promotion of vehicle networking communication solutions, support standardization, accelerate commercialization, and promote it to the global market. Currently, it has over 40 members, including major automakers, operators, and equipment manufacturers.
Next, let’s introduce 5G: The International Telecommunication Union (ITU) defines 5G as a next-generation cellular wireless communication network capable of providing a rate of 20Gbps, a latency of 1 millisecond, 1 million connections per square kilometer, and 99.999% network stability. The industry generally expects 5G to be commercially available by 2020.
What is the Concept of Vehicle-to-Everything (V2X)?
The name V2X is quite intuitive; it means connecting vehicles to the network or connecting vehicles into a network, including Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I), Vehicle-to-Network (V2N), and Vehicle-to-Pedestrian (V2P). The services within this network can be quite diverse, but from the end customer’s perspective, they mainly fall into these three categories:
-
Passengers: Users sitting in the vehicle enjoy mobile internet services, technically referred to as Mobile Broadband (MBB). This falls within the traditional business scope of mobile operators;
-
Drivers: Drivers need various intelligent traffic information services, including traffic conditions and route selection, which can be addressed within the traditional MBB business scope through applications like various electronic maps. Additionally, vehicle networking provides drivers with auxiliary safety alert information, such as obstacles or sudden accidents ahead. The reliability and latency of such alert information have certain requirements, and whether current communication technologies can meet these remains a topic of debate;
-
Vehicles: This is the true meaning of vehicle-centric vehicle networking services. Vehicles require safety assistance information for driving, and semi-autonomous to fully autonomous driving requires information input and output. This area will bring new characteristics and demands to mobile communications, including LTE-V in 4G and uRLLC (Ultra-Reliable Low Latency Communication) in 5G, as well as new topics like 5G-V2X; V2X is often primarily referring to this service scenario.
The vehicle networking services serving passengers and drivers are essentially traditional MBB services, except that the vehicle as a terminal has a larger size and more power, providing technical space for deployment, including more antennas on the vehicle to achieve higher-order MIMO and provide higher data rates, offering high-speed internet access inside the vehicle.
If someone conducts a networking experiment in a vehicle and claims it is vehicle networking, that is misleading. If someone sets up a traffic signal light prompt and also calls it vehicle networking, do not generalize; the value of vehicle networking is far beyond that.
The following text focuses on discussing the scenario of the third customer, “vehicles.”
What is the Relationship Between V2X and Autonomous Driving?
When discussing vehicle networking and autonomous driving, it’s important to emphasize that the core of autonomous driving is the vehicle, not the network; just as the core of the Internet of Things is the object, not the network. Without V2X, driving can still be autonomous, but without V2X, true full-scenario autonomous driving cannot be achieved.
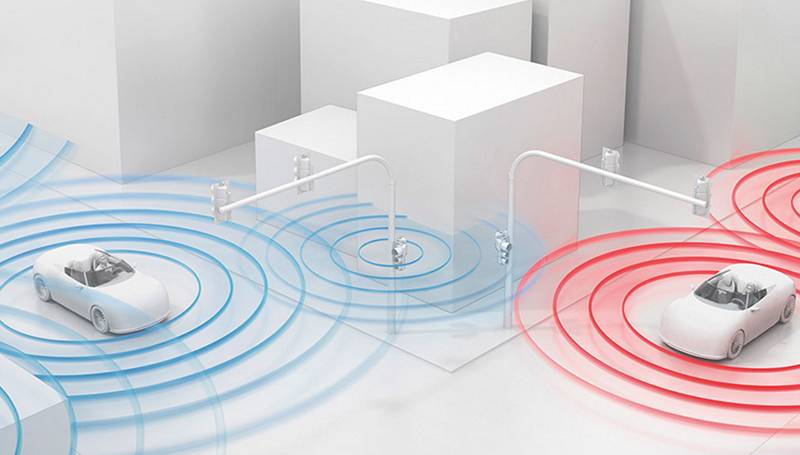
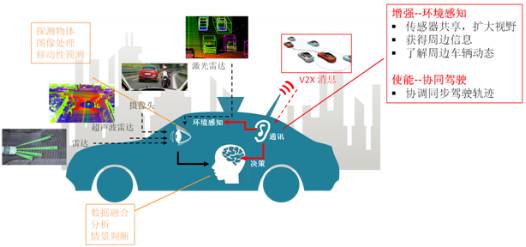
Current autonomous driving systems from Google, Tesla, and Mobileye rely on various information inputs from sensors, radar, and cameras, making decisions through artificial intelligence technology, allowing the vehicle itself to drive autonomously to a certain extent. However, the vehicle itself has significant limitations; in adverse weather conditions like nighttime, rain, or fog, at intersections or turns, radar and cameras may not see or accurately perceive obstacles. A fatal accident involving Tesla occurred when the autonomous driving system failed to recognize the white body of a truck under strong sunlight, leading to a failure to activate the braking system in time. Developing more powerful sensors for such scenarios could become prohibitively expensive for consumers. This necessitates V2X communication (V2N, V2, V2V, V2P) within vehicle networking, providing information far beyond the current sensor perception range. Essentially, V2X can be viewed as an extended “sensor,” communicating with surrounding vehicles, roads, and infrastructure to obtain more information than a single vehicle can gather, significantly enhancing the perception of the surrounding environment. The inherent characteristics of 5G networks, with ultra-high bandwidth and ultra-low latency, can collect and transmit more precise environmental information in real-time, utilizing cloud computing capabilities for the vehicle’s autonomous driving decisions.
Recognizing this point clarifies that V2X is a necessary and value-adding enabling technology for achieving autonomous driving scenarios; in other words, even if a vehicle can achieve partial autonomous driving on its own, vehicle networking technology can still further enhance performance and reduce dependence on high-precision sensors.
Additionally, according to unofficial data, results verified internally by automakers indicate that decisions based on aggregated information from multiple vehicles can improve reliability by three orders of magnitude compared to decisions based solely on a single vehicle’s information. (Note that there is no requirement for all vehicles on the road to have V2X functionality; a portion of vehicles in the traffic flow sharing information can significantly enhance the reliability of decisions made by individual vehicles and the overall system). This is another important value of V2X.
Thus, for a long time in the future, even though there will be a coexistence of V2X and non-V2X vehicles on the road, the benefits brought by V2X technology to individual vehicles will gradually increase with the penetration rate of V2X models, thus positively driving the upgrade and replacement of non-V2X vehicles.
What Information Does Autonomous Driving Need to Transmit Through V2X?
As mentioned above, in V2X-enabled autonomous driving scenarios, various decisions still originate from the vehicle itself. This determines that in the vehicle networking environment, the vehicle itself is an independent decision-making entity, even if it is connected to the network or integrated into one. This outcome is determined by two facts:
First, vehicle owners do not want to entrust their safety to other vehicles or third parties. The information provided by surrounding vehicles is merely for reference to the vehicle itself. The final decision still lies with the vehicle. Command information from surrounding vehicles, especially instructions like “the front vehicle instructs the rear vehicle to brake,” will not be directly accepted by the vehicle; such information must be filtered through several layers and compared with the vehicle’s sensor information before the vehicle decides to accept or reject it.
Second, from a commercial perspective, automakers are in a competitive relationship with each other and will consciously highlight the differences between brands; the performance of autonomous driving is one of the characteristics that reflect that differentiation. The decision-making algorithms and hardware, such as antenna numbers, corresponding to V2X autonomous driving functionality are methods to showcase brand superiority. Therefore, automakers are reluctant to distribute decision-making mechanisms and algorithms across different manufacturers’ vehicles, and even among their own high-end and low-end brands.
Thus, V2X in autonomous driving needs to transmit and interact with information that is not the final decision command but rather the state information of surrounding vehicles and the environment. For example, in overtaking scenarios, sharing sensor information from surrounding vehicles is necessary, and in merging scenarios, sharing the driving operational status of surrounding vehicles is required. This aligns with the previously mentioned positioning of V2X as an “extended” sensor.
Essentially, regardless of the application scenario, the information that needs to be transmitted via V2X boils down to these two types:sensor information sharing and sharing of surrounding vehicles’ driving operational status information. It can be said that all V2X autonomous driving messages are different expressions of these two types of information.
Moreover, the single-vehicle decision-making model of autonomous driving can also lead to another fact:
The V2X communication mode will primarily adopt a multicast broadcast communication model, allowing for more efficient sharing of surrounding information, rather than the traditional unicast point-to-point communication method based on acknowledgment.
What Does 1 Millisecond of Latency Mean for Autonomous Driving?
3GPP has defined several low-latency scenarios ranging from 1 millisecond to several milliseconds, primarily focused on autonomous driving. The response time in autonomous driving, such as braking, is a system response time that includes the time required for network cloud computing processing, vehicle negotiation processing, as well as the vehicle’s own system computation and braking processing time. To ensure that the braking distance at 100 km is no more than 30 cm, the overall system response time must not exceed 10 milliseconds, while the best reaction time of human F1 drivers is around 100 milliseconds. From a safety perspective, the lower the system response time, the better, with higher requirements for communication latency. In the future, if 5G networks can provide 99.999% stability while achieving communication latency of less than 1 millisecond, then the low-latency scenarios for autonomous driving vehicles will require coordination from other system components.
A detailed analysis of these autonomous driving scenarios reveals that the time required for autonomous driving operations, including data collection, analysis, algorithm decision-making, and machine actuation, far exceeds 1 millisecond. The communication latency accounts for a very small proportion of the overall time chain. Additionally, the impact of changes in the external environment on vehicle system latency is significantly greater than 1 millisecond; for example, the impact of rain or snow on braking can exceed several seconds to tens of seconds. Therefore, from a holistic perspective, it is evident that significant resources should be invested to achieve breakthroughs in ultra-low latency communication for V2X rather than focusing on improving other aspects, such as reducing image processing latency from 100 milliseconds to 90 milliseconds.
Thus, at this stage, end-to-end low latency relies more on improvements in sensors, processors, algorithms, and machine actuation. With the large-scale deployment of ultra-low latency 5G networks in the future, it is believed that more advanced communication technologies will bring more innovations to automakers, making vehicles safer.
What Does Autonomous Driving Need Most? V2V or V2N?
To answer this question, two dimensions must be analyzed.
One is the technical dimension: The basic requirement for autonomous driving is that V2V communication must be available everywhere, including environments without network coverage; thus, V2V direct connection is a fundamental function of V2X. IEEE has IEEE 802.11p (DSRC), and LTE has LTE-V PC5, both of which support V2V direct connections. In many autonomous driving scenarios (such as platooning and merging), due to the close distance between vehicles, V2V direct connection is a better communication model.
The other is the commercial dimension, which ultimately determines whether V2X can be successfully deployed. Automakers have long been concerned that reliance on cellular technology for V2X could lead to autonomous driving services being controlled by telecom operators, so V2V direct connection is often the preferred choice for automakers.
However, completely network-independent V2V faces many issues regarding congestion, interference management, and coverage. These flaws have been repeatedly verified in system analyses of IEEE 802.11p. A more feasible solution is to provide V2V direct communication capabilities while allowing the cellular network to assist, significantly alleviating communication pressure in hotspot areas through V2N communication, ensuring the stability of vehicle networking communications.
V2N can also be used for map updates, traffic management, and providing information about road conditions beyond a certain distance. Additionally, automakers hope to collect driving and sensor information from vehicles via V2N for big data analysis in the network; this is closer to the 5G mMTC (massive Machine Type Communication) scenario. With the arrival of 5G, the capabilities of V2N will be further enhanced, facilitating the acquisition and transmission of autonomous driving information.
V2V Communication: Which is Better, 11p or C-V2X?
11p, also known as DSRC, is a protocol for V2V communication based on IEEE 802.11p. Many automakers have conducted nearly a decade of research and testing on DSRC systems, cultivating a group of supporters within various automakers, but commercial progress has been less than ideal. In recent years, the cellular camp has joined the competition, introducing C-V2X technology, including LTE-V and the future 5G-V2X, to compete with 11p, escalating to a political height of EU cooperation against US standards.
The cellular camp has consistently strived to prove that cellular technology-based performance outperforms 11p, and that it can leverage operator base stations to reduce roadside equipment investment and accelerate the commercialization of vehicle networking. However, automakers are skeptical, and even some automakers are hesitant to join 5GAA due to its clear emphasis on cellular technology. After in-depth discussions, it became clear that automakers are well aware that cellular technology is technically superior to 11p; however, their real concern is that cellular technology V2X may lead to automakers being controlled by telecom operators. It wasn’t until the MAO architecture was proposed within 5GAA, balancing the power distribution among various stakeholders in V2X, that these automakers began to alleviate their concerns regarding cellular V2X.
What is the MAO Architecture Based on 5G Slicing?
From a technical perspective, network-assisted V2V solutions, such as LTE-V Mode 3 and Mode 4, require the definition of new signaling on both the vehicle terminal and base stations, with base stations managing and scheduling V2V resources. This imposes requirements for upgrades and matching on both the vehicle terminal and base stations.
From a commercial perspective, current LTE-V and future 5G-V2X face issues of phased deployment and compatibility. The product lifecycle of automobiles is much longer than that of smartphones, requiring N years of preparation for deployment. However, without a matching cellular network, the vehicle terminals alone cannot initiate operations. At the same time, without a clear business model, operators are also reluctant to invest in the costs of deploying or upgrading V2X cellular networks.
A feasible solution is to shift the management and scheduling functions of wireless resources needed for V2V communication provided by the cellular network to the cloud, allowing the V2V resource allocation and management functions to be realized through a Cloud Server. We refer to this overall architecture as the MAO (Mobile Automotive Operator) architecture.
This Cloud Server can be deployed centrally or distributed within or outside the operator’s network, and can be operated by automakers, mobile operators, or third parties, thus enabling cross-operator and cross-manufacturer collaboration. The information for managing and allocating V2V resources is transmitted through existing MBB or 5G eMBB pipelines between the Cloud Server and vehicle terminals. This type of service, which provides specific network characteristics for a particular industry, is precisely what future 5G network architectures excel at, which we refer to as 5G network slicing.
The MAO architecture can facilitate the separate evolution of V2X vehicle terminals and V2X networks, accelerating innovation and upgrades for both, thus promoting the realization of autonomous driving. LTE-V/5G terminals can be deployed in vehicles early on without affecting automakers’ testing and product release. As LTE/LTE-V evolves into 5G networks, it can provide higher V2X performance and support more application scenarios.
What Can 5G Bring to Vehicle Networking Technology and Business Models?
According to the latest 5G field test results released by Huawei, the current 5G network can achieve a downlink throughput of over 25Gbps while ensuring high stability and mobility, with user interface latency of less than 0.5 milliseconds. The performance has exceeded the ITU’s definition of 5G.
Let’s examine the future communication network requirements based on the system that will emerge after autonomous driving:
-
For the “network” related to vehicle driving and safety: V2N, as an extension of traditional sensors, combined with direct vehicle communication (V2V) and assistance from V2N (MAO architecture), will greatly enhance safety and stability with the 5G network.
-
For the “network” of road traffic information management: The currently discussed V2I can essentially innovate within the application layer of the V2N pipeline. The ultra-high-performance network brought by 5G will further enable new applications.
-
For the broadband “network” needed by people within the vehicle: After the advent of autonomous driving, the vehicle is no longer just a vehicle; it becomes a cinema, a game room, an online clinic… The demand for V2N can be imagined, which is a natural scenario for the enhanced mobile broadband of 5G.

From an overall commercial value perspective, as long as vehicles are connected to the internet, new business opportunities will arise.
For the terminal field, using V2X communication modules that support autonomous driving as an entry point, further integrating various functional modules within the vehicle, including in-vehicle computing, storage, etc., will build a new field of in-vehicle electronic business, which can also be seen as the business domain of chip companies. Creating higher-performance and safer connected vehicles, accelerating the realization of autonomous driving, and providing a better in-vehicle passenger interconnect experience, while becoming the software and hardware platform for managing in-vehicle applications, is where automakers can differentiate themselves.
For wireless networks, once vehicles are connected to the internet, regardless of which technology is used for vehicle-to-vehicle communication, the massive amount of data generated by vehicles needs to be channeled through V2N. The sensor perception of information beyond the distance requires V2N to carry it, and various business innovations will inevitably drive higher demands for network data transmission, as well as higher demands for low-latency and high-reliability V2N (such as the performance guarantee for V2V scheduling based on the aforementioned MAO architecture). Additionally, due to the uniqueness of V2N services, new demands for 5G sliced networks will arise.
In summary, only by understanding the value, positioning, technical requirements, and business models of 5G-V2X in autonomous driving from these various perspectives can it be relatively easy to reach a consensus and understanding between the telecommunications and automotive industries, thus promoting industry implementation. The reality is that there are still deviations in understanding these various issues; some are still at the conceptual level, whether among certain participants within 5GAA or some participants in the vehicle networking ecosystem, who have not truly grasped the essence of the issues. This is also a mission that 5GAA needs to undertake.
(The author is the head of the 5G team at Huawei’s European Research Institute and one of the initiators of 5GAA)
Submission email for network optimization freelancers: [email protected]
Long press the QR code to follow

On the road of communication, let’s walk together!