



Previous Issues
Design and Installation of Distribution Cabinets and Panels
2021-06-08

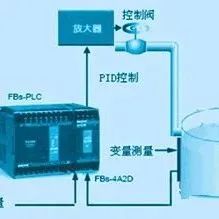
Fun Summary of PID Algorithm, Ensuring You Understand at a Glance!
2021-06-07
[Academic Frontier] Tsinghua University Zhang Ning: Thoughts on the Development Direction of China’s Power System Technology Aimed at Carbon Neutrality!
2021-06-04
Complete Supply Chain of the Energy Storage Industry!
2021-06-03

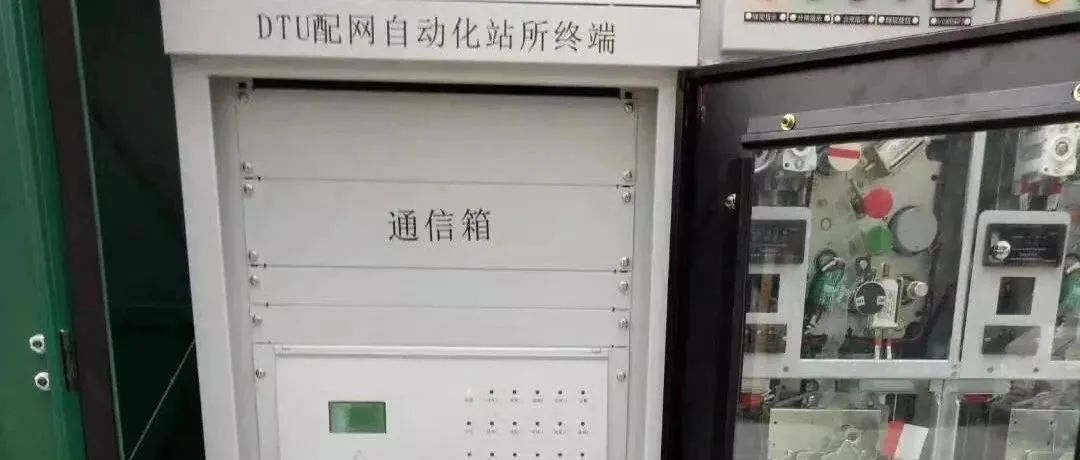
Understanding the Differences Between DTU, FTU, TTU, and RTU in One Article!
2021-06-02
Do You Understand These Basic Concepts of Power System Operation?
2021-06-01


