Click the above  “Easy Learning Electronics” to follow and easily learn electronic knowledge.
“Easy Learning Electronics” to follow and easily learn electronic knowledge.
In a CAN bus, the priority of messages sent by all transceivers ranges from the least significant bit (LSB) to the most significant bit (MSB); the message with the highest priority will be sent. Specifically for CAN, if two transceivers send messages simultaneously, they both “open their mouths” to say a “0” (logical high level); the lower the value, the higher the importance of the message. In other words, if both transceivers are “shouting”, the one that “shuts up” first must wait until the other transceiver has finished sending before it can speak. This entire process is called arbitration, more precisely, non-destructive arbitration.
When designing communication systems, you can freely use many robust languages. Some of these expressions are quite mature and have clear meanings, while other languages are still developing, such as CAN bus. CAN is a very robust differential signaling communication protocol. This protocol was originally designed for automotive applications, allowing communication between microcontrollers, sensors, or integrated circuits without a host controller.
The working principle of CAN is also one of the reasons for its robustness. Its differential signaling topology allows it to easily cope with coupled noise. In the event of a shift caused by ground layer noise, this feature keeps the transmission lines, CANL and CANH, together. Unlike other differential protocols, when CAN is in receive state (a logical 1), both lines will be at the same voltage, typically VCC/2 (unless it is a 3V CAN bus transceiver, in which case it would be a completely different way of dialogue). When the CAN lines are driven separately, this becomes the dominant state and a logical 0. Imagine CANL and CANH as two lips of a mouth: L is the lower lip, while H is the upper lip. When you want to speak, you tell yourself to part your lips and open your mouth. This is a low-level active logic signaling, where “0” is set when you open your mouth to speak. When you are not speaking, your lips are tightly closed, and the CANH and CANL lines are both at VCC/2 level.
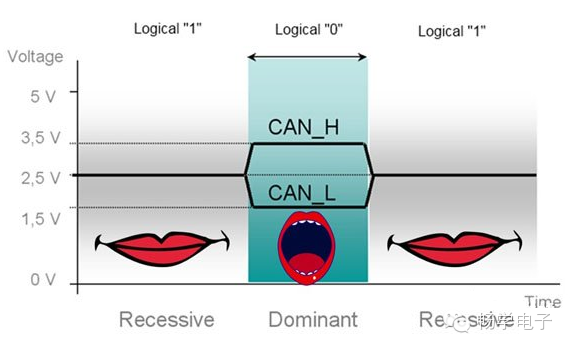
Figure 1: CAN Signaling and Logical Levels
In addition to these basic principles, CAN bus is also continuously evolving. New adjustments and enhancements are making this technology more efficient and unlocking new levels of performance.
> > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > > >
==> Visit www.eeskill.com to learn more!