In today’s rapidly advancing technology, the intelligence of automobiles is an inevitable trend, and research on autonomous vehicles is being conducted vigorously worldwide. In ADAS testing and development, LiDAR occupies a very important position due to its superior performance and high precision, making it an indispensable component in ADAS testing and development.
Introduction to LiDAR
Principle of LiDAR
Full Name
LiDAR (Laser Detecting and Ranging), which stands for laser detection and ranging.
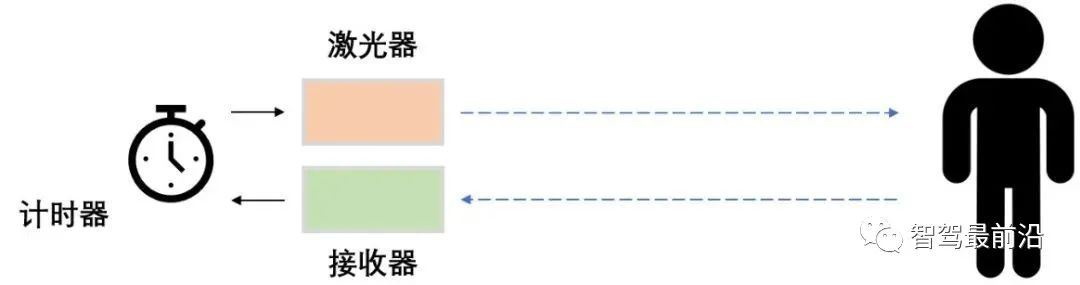
Detection Principle
The laser emitter emits laser pulses, and a timer records the emission time; after the pulse is reflected by an object, it is received by the receiver, and the timer records the reception time. The distance d = (Δt*c) /2.
Then, by performing horizontal rotation scanning, the angle is measured, and a two-dimensional polar coordinate system is established based on these two parameters: angle and distance. By obtaining signals at different pitch angles, height information in three dimensions can be acquired. Thus, the spatial three-dimensional position of the surrounding environment can be detected, and three-dimensional modeling can be performed based on the detected information.
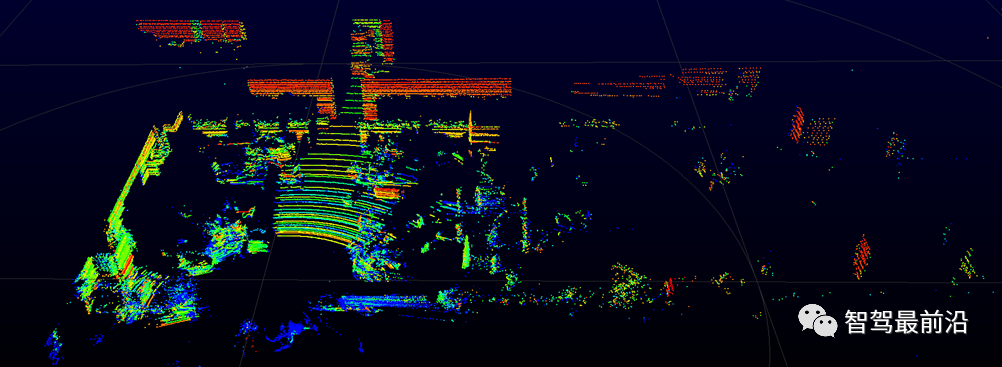
High-frequency lasers can acquire a large amount of positional point information (about 1.5 million points) within a second (called point cloud). In addition to obtaining positional information, the reflectivity of the laser signal can also differentiate between different materials of the target object.
Mainstream LiDAR Brands
Velodyne
Features: High accuracy; wide range, capable of 360° detection; strong anti-interference ability. Its performance is outstanding, but the price is expensive.
For example, Velodyne, a leading global LiDAR manufacturer:

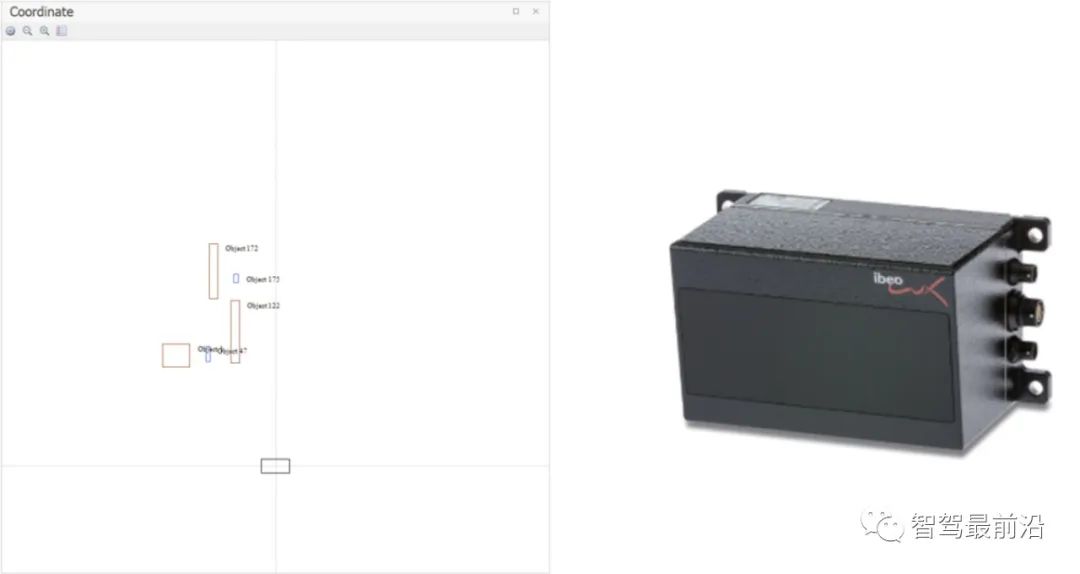
Ibeo
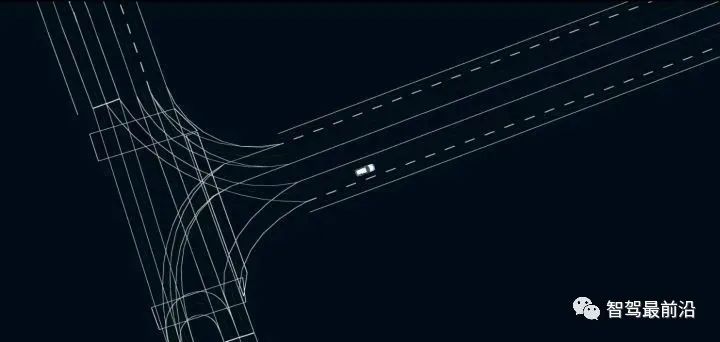
Features: Can recognize types of obstacles, such as pedestrians, cars, or trucks. It can output the overhead view outline of obstacles, target object positions, and motion information parameters.

LiDAR Data
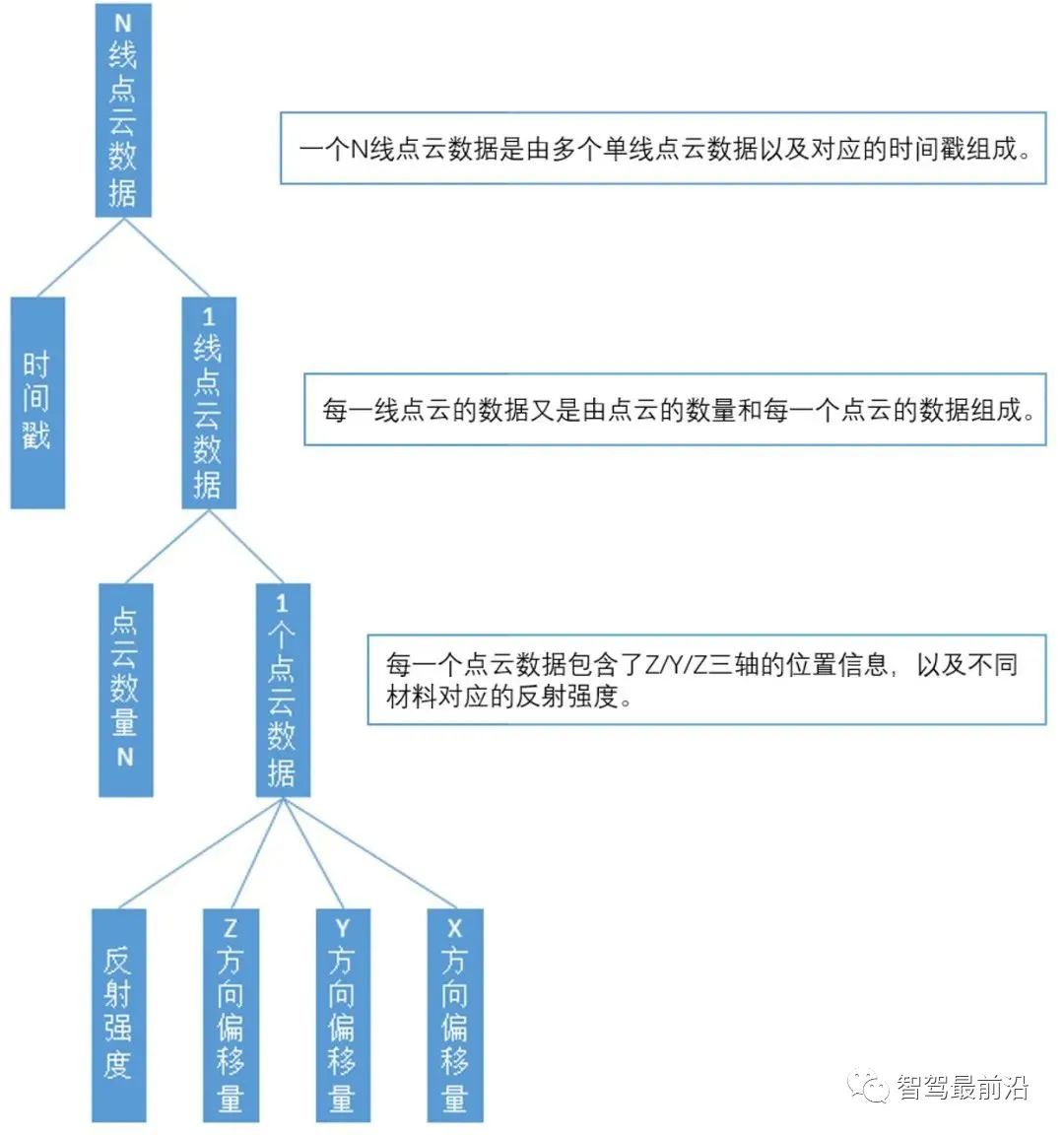
In actual autonomous driving systems, each frame of data will have a timestamp, which is necessary for subsequent time-related calculations. Therefore, the point cloud data structure of N-line LiDAR is shown in the figure below.
Application and Role of LiDAR in ADAS Testing
LiDAR plays several core roles in autonomous driving applications—3D modeling of the surrounding environment, high-precision positioning, and obstacle detection and classification.
Obstacle Detection and Classification
During the scanning process, LiDAR first identifies obstacles, clarifying their position in space, and then classifies them based on the existing obstacles. For example, we segment obstacles like cars and people into independent entities, and then match them based on these segmented entities to classify and track obstacles. The tracking process involves first segmenting the point cloud, then associating targets based on the point cloud, allowing us to determine whether the previous frame and the next frame belong to the same object for tracking, and then outputting target tracking information.

High-Precision Electronic Map Mapping and Positioning
Using the point cloud information from multi-line LiDAR and the inertial navigation information from the map collection vehicle to create high-precision maps. Autonomous vehicles achieve high-precision positioning by matching laser point cloud information with high-precision maps.
LiDAR Data Collection, Storage, and Analysis
LiDAR Data Collection
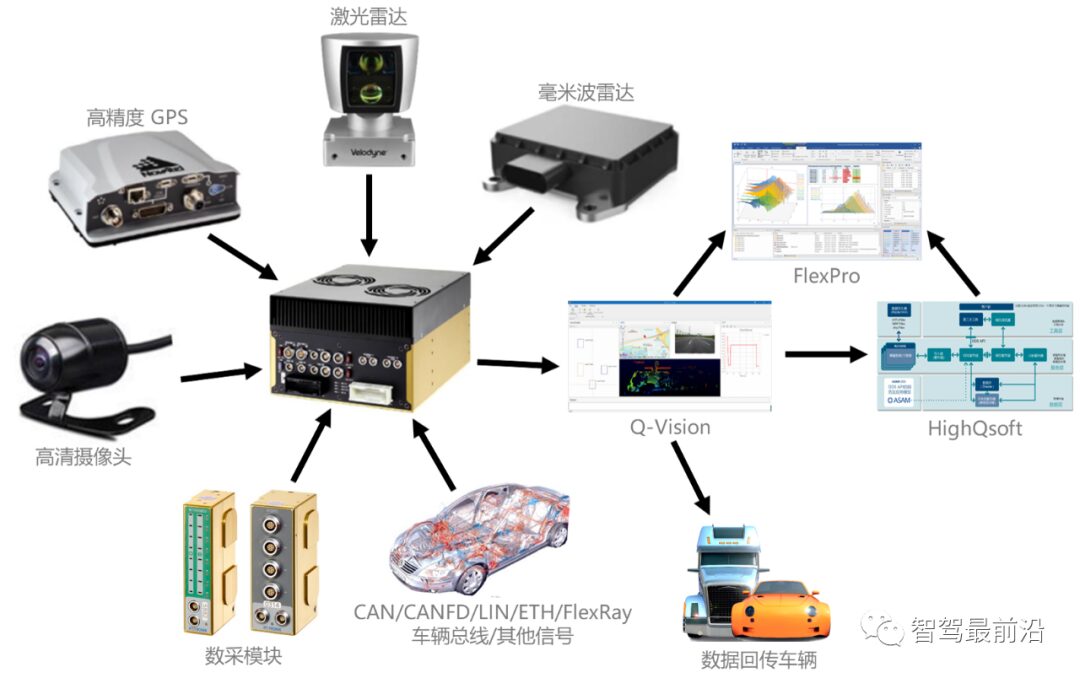
In ADAS testing, a vehicle generally needs to be equipped with multiple LiDARs, multiple millimeter-wave radars, and multiple cameras. This data will be output through Ethernet or CANFD types. The ADAS testing solution from Fengqiu Technology can simultaneously collect, display online, and store data from multiple radars, videos, vehicle buses, and data acquisition.
Hardware: Cost-Effective Industrial Computer

• Configuration: inter i7-8700T CPU, 32GB RAM, Win10 operating system;
• Interfaces: 3 Video, 6USB
3*1GB ETH, 2 RS-232
8 I/O, Audio, 1CAN
Expandable Pcle interface (CAN, LIN);
• Operating Temperature: -40℃~70℃;
• 2 hot-swappable mobile hard disk slots;
• A single hard disk can support 1TB storage;
• Supports Wi-Fi, 4G, LTE, and other wireless communications;
• 9~48 V vehicle power supply.
Software: Q-Vision
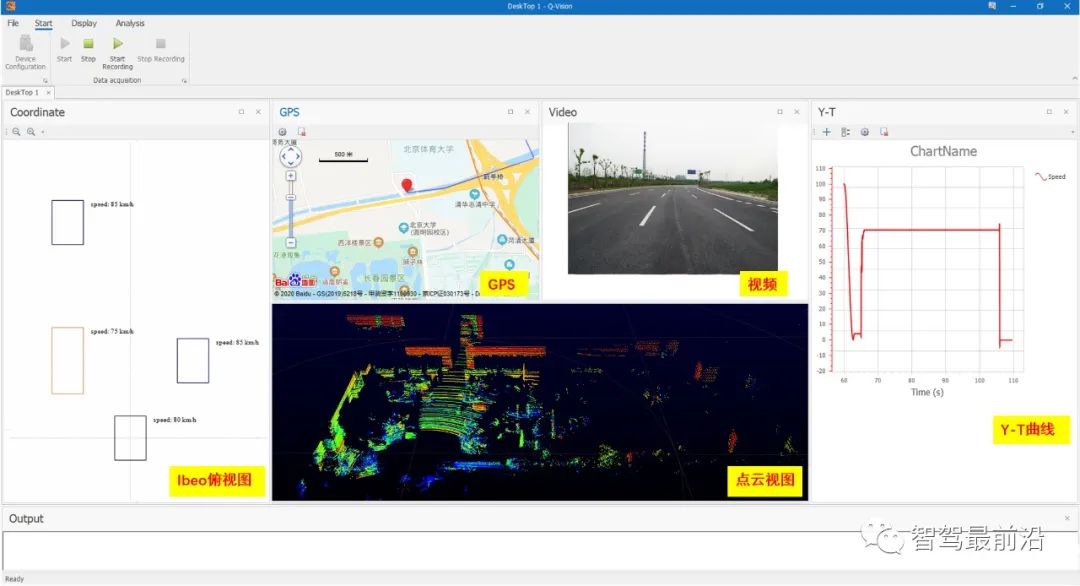
• Supports various signal acquisitions like CAN/LIN/CANFD/ETH;
• Supports radar point cloud maps, radar overhead views, map trajectories, videos, CAN bus, and y-t displays;
• Supports various CAN hardware like Kvaser, Vector, Softing, and NI;
• Supports mainstream radar sensors like Velodyne and Ibeo;
• Supports various purposes like vehicle testing, ECU calibration, and UDS diagnostics;
• Supports various protocols like XCP/CCP, UDS, J1939, and OBDⅡ;
• Supports specific function development.
LiDAR Data Storage
The data output from LiDAR and other sensors via Ethernet can be recorded and stored on hard disks by data recorders, and then uploaded to the cloud data management center through high-speed reading upload devices, where the data is tagged and managed for easy retrieval.
Hardware: High-Speed Hard Disk Reader

• Can read 8 hard disks simultaneously;
• A single hard disk can support 1TB;
• Single reading speed: 1135MB/s;
• 100 V~240 V power supply;
• Dimensions: W427×D230×H95.
Cloud Data Center: HighQsoft
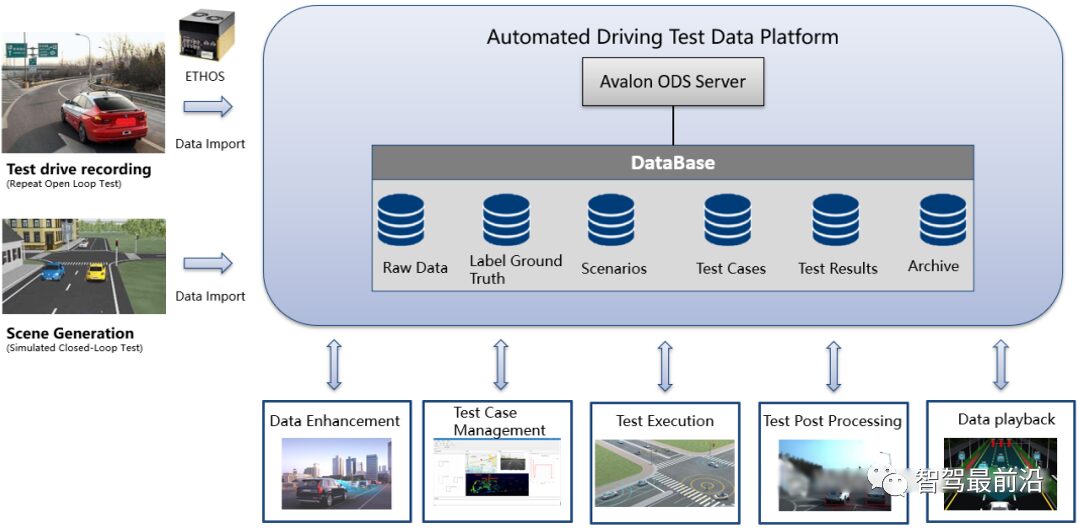
• Can manage and preprocess data based on test projects, test dates, and test scenarios;
• Provides ODS data interface for direct access to database content.
