Journal of Unmanned Undersea Systems
2024 Issue 6

Target Tracking Algorithm Under DoS Attacks Based on Underwater Acoustic Sensor Networks
Authors:
Yan Jing, Yang Jin, Yang Zhan, Luo Xiaoyuan
Affiliation:
School of Electrical Engineering, Yanshan University, Qinhuangdao, Hebei, 066004
Funding:
National Natural Science Foundation (62222314); Hebei Natural Science Foundation (F2024203047, F2022203001, F2024203072); Central Guidance Local Fund (226Z3201G).
Read Original Text
Abstract
Considering the impact of underwater denial of service (DoS) attacks and the acoustic channel layering effects, this study investigates the target tracking problem based on underwater acoustic sensor networks (UASN). First, the UASN architecture consisting of underwater sensors, surface buoys, and underwater targets is considered. Based on this, an underwater target motion model and an underwater DoS attack model are constructed, and an improved Unscented Kalman Filter (UKF) underwater target tracking algorithm is proposed. Furthermore, the convergence of the tracking algorithm is proven, and the Cramér-Rao lower bound of the algorithm is derived. Simulation and experimental results show that the proposed algorithm can effectively track targets in underwater environments, and the consistency UKF-based algorithm improves tracking accuracy.
Introduction
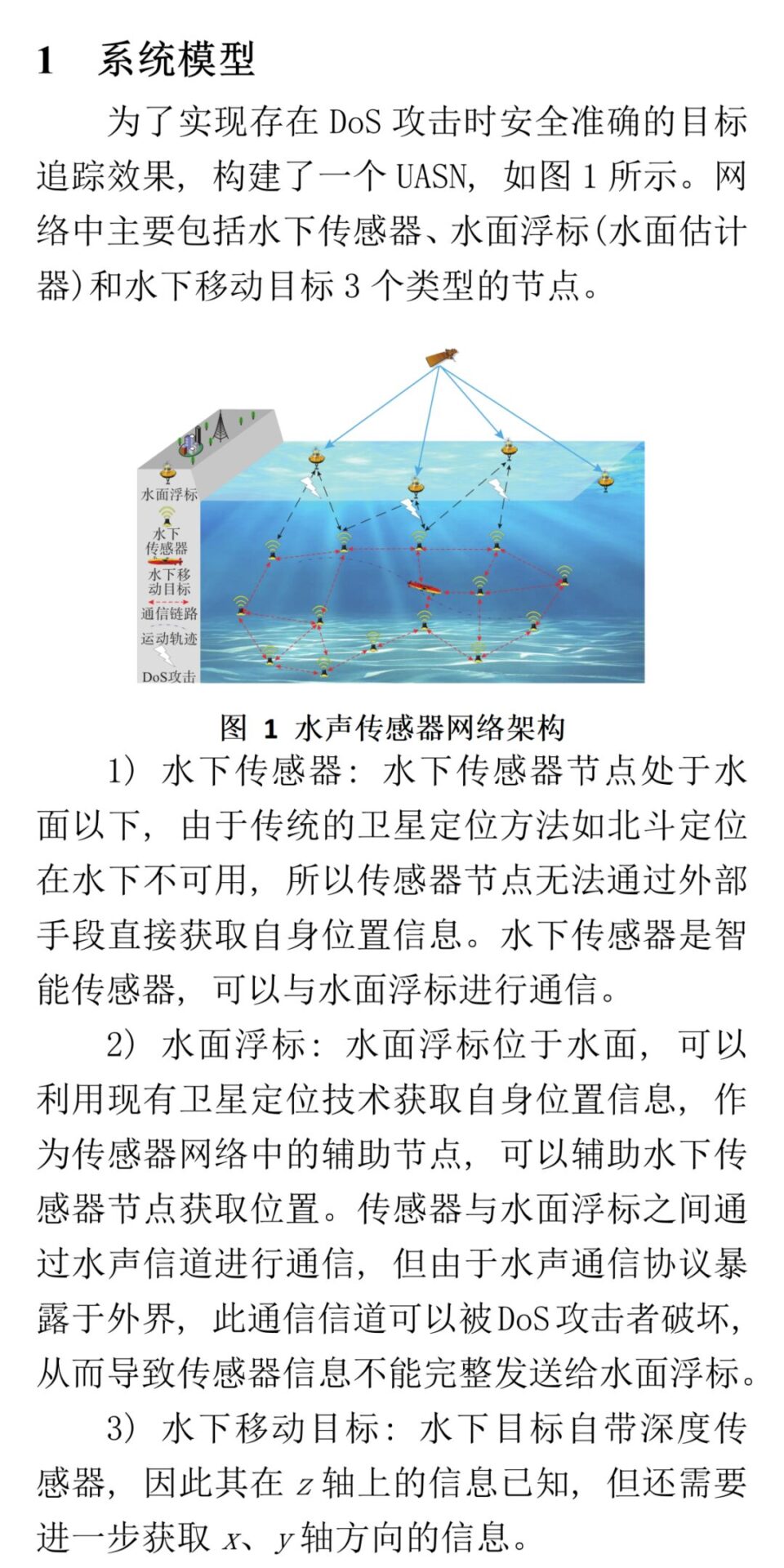
Underwater acoustic sensor networks (UASN)[1] consist of autonomous sensors or devices distributed in underwater space, which can communicate with each other using underwater acoustic communication channels and are gradually applied to various underwater tasks such as environmental monitoring and target tracking. The underwater acoustic communication channel has many inherent characteristics such as sound channel bending[2], which can lead to high error rates and affect the transmission reliability of underwater target tracking networks. Additionally, the shared and open nature of the underwater environment[3] poses various security challenges to UASN, such as denial of service (DoS) attacks[4]. DoS attacks on UASN may employ various methods to interfere with or disrupt the normal operation of underwater sensor nodes, such as resource exhaustion attacks[5], protocol attacks[6], and traffic flooding attacks[7], thus affecting network performance. This paper focuses on resource exhaustion attacks: attackers make UASN unavailable by consuming system resources such as memory or processing power.
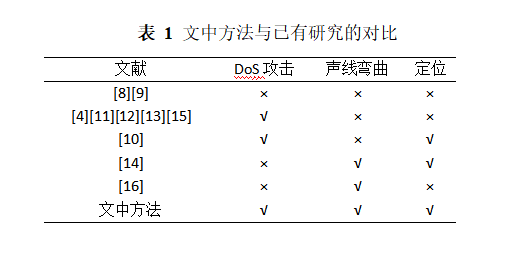
Olakanmi[8] and Boubiche[9] introduced some solutions for secure communication in wireless sensor networks, such as complex encryption operations or trust-based privacy schemes. Gebreyesus[10] proposed a secure positioning method based on optimized multilayer perceptron artificial neural networks to detect and locate various attacks, but this method is not suitable for underwater environments. Cremers et al.[11] proposed a distance bounding protocol that can resist distance attacks, but this protocol also renders underwater tracking networks inoperable. For DoS attacks in terrestrial wireless sensor networks, Djuraev et al.[12] proposed a channel hopping mechanism that provides channel protocols between user nodes and access points (AP) without prior negotiation, but this method is not applicable to sensors in underwater acoustic networks. Tan et al.[13] used multivariate correlation analysis methods to propose a new detection system to protect the system from DoS attacks, but this method is too complex and costly in time. Yan et al.[14] studied the input-output (IoUT) privacy protection positioning problem under asynchronous clocks, layering effects, and spoofing attacks, developing a privacy-preserving asynchronous transmission protocol for secure positioning, but this method cannot be applied to DoS attacks. The classic consistency Kalman filter proposed by Olfati et al.[15] in 2005 can improve tracking performance to some extent, but existing research has not considered underwater characteristics and is not suitable for underwater target positioning under DoS attacks. Moreover, UASN is also subject to strict resource constraints, such as limited battery life and computational capacity[16]. To highlight innovation, Table 1 compares this study with existing research.
Based on the above situation analysis, this paper studies an algorithm capable of effectively tracking underwater targets under DoS attacks. The main contributions are as follows: 1) Simultaneously constructing models for DoS attacks and underwater target state estimation; 2) Proposing an improved consistency Kalman filtering algorithm and performing performance analysis to verify the effectiveness of the algorithm; 3) Comparing with other novel methods to demonstrate that the proposed algorithm has higher tracking accuracy.
Conclusion
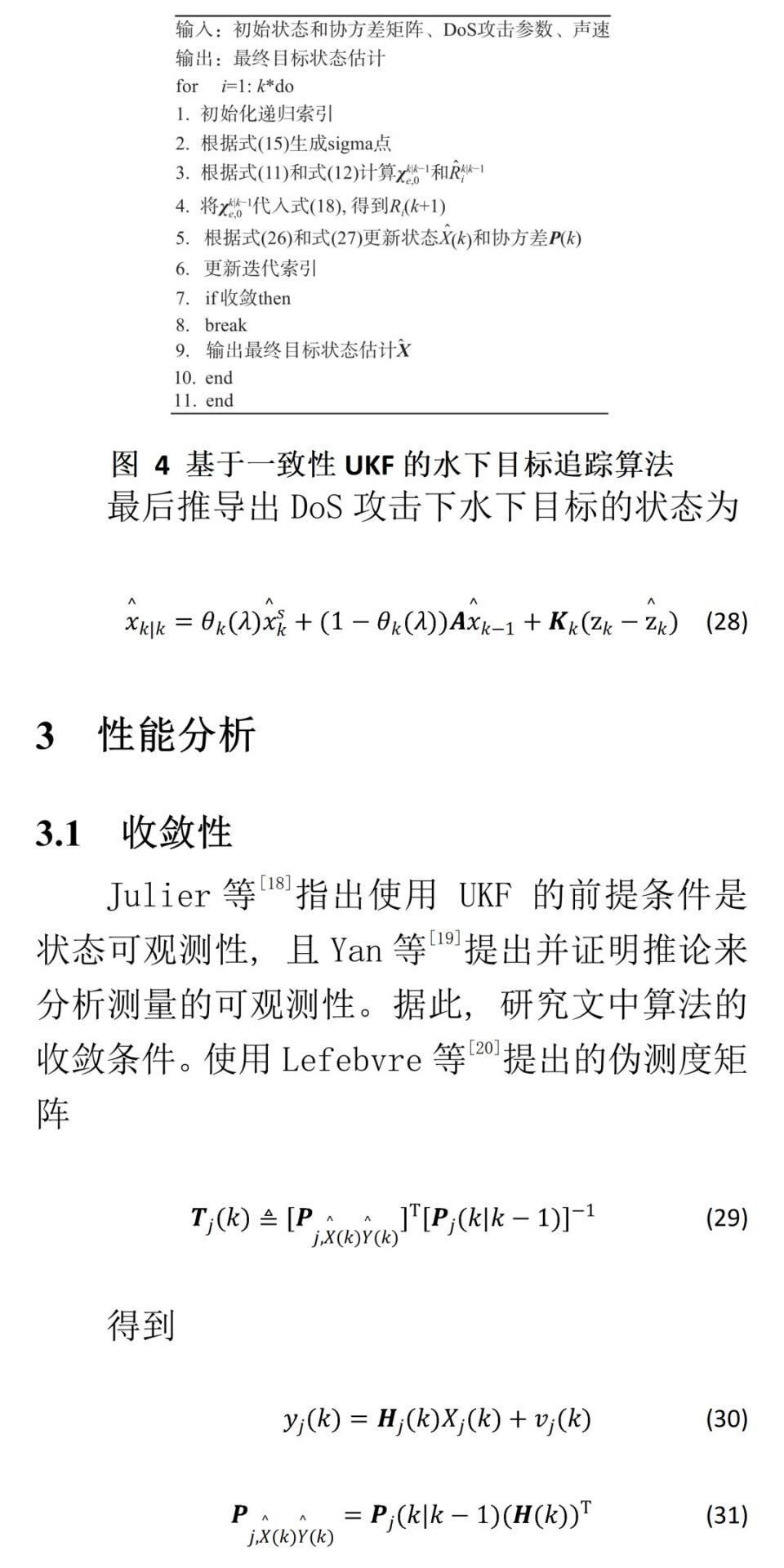
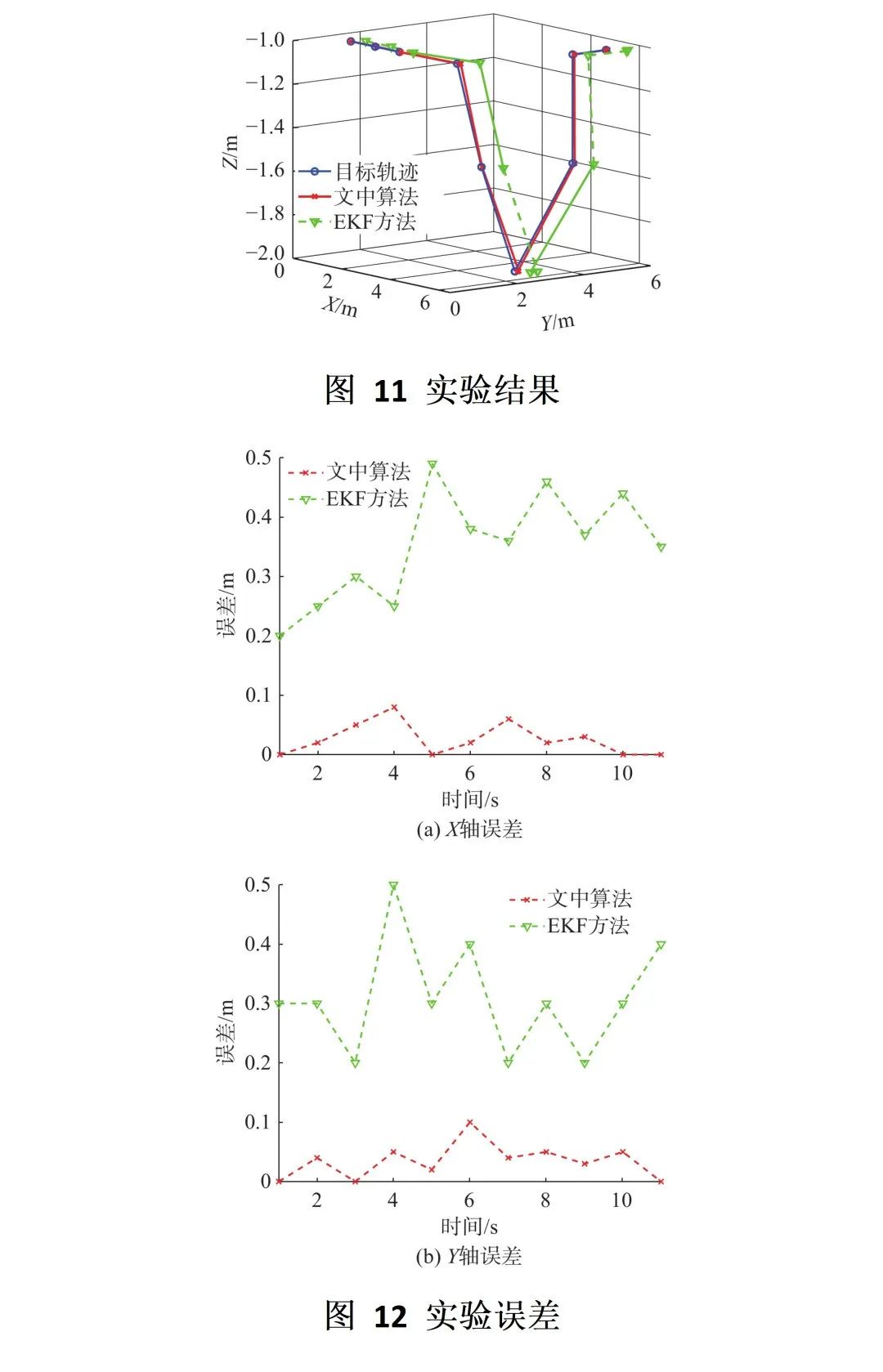
To address the underwater target tracking problem under DoS attacks, this paper proposes an improved consistency UKF algorithm and performs theoretical analysis of the method’s performance. Simulation results indicate that the proposed method has a small tracking error of about 4 m, and experimental verification confirms the effectiveness and feasibility of the algorithm. Future work will further validate the algorithm’s performance in marine environments.
1
END
1
References omitted. The article has been abridged, originally published in Journal of Unmanned Undersea Systems, 2024, Volume 32, Issue 6. Click to read the original text.