





Medical Robotics

(Fourth Issue of 2025)
Industry News
Institute of Medical Robotics

To closely track the dynamics and trends of the medical robotics industry, the Institute of Medical Robotics at Shanghai Jiao Tong University began compiling medical robotics industry news in March 2021. Focusing on the development of the medical robotics industry against the backdrop of the national “Healthy China” strategy, the institute will closely monitor the dynamics of major ministries such as the National Medical Products Administration, the National Health Commission, and the Ministry of Science and Technology, as well as well-known enterprises in the industry, to filter and form news.
This issue introduces important dynamic information on new technologies in the medical robotics industry for July-August 2025. More exciting content from previous issues has been uploaded to the institute’s official website: https://imr.sjtu.edu.cn/cyzx.html, and everyone is welcome to download and read at any time~

04
New Technologies
01
Carnegie Mellon University Develops Brain-Machine Interface for Robotic Hand Control
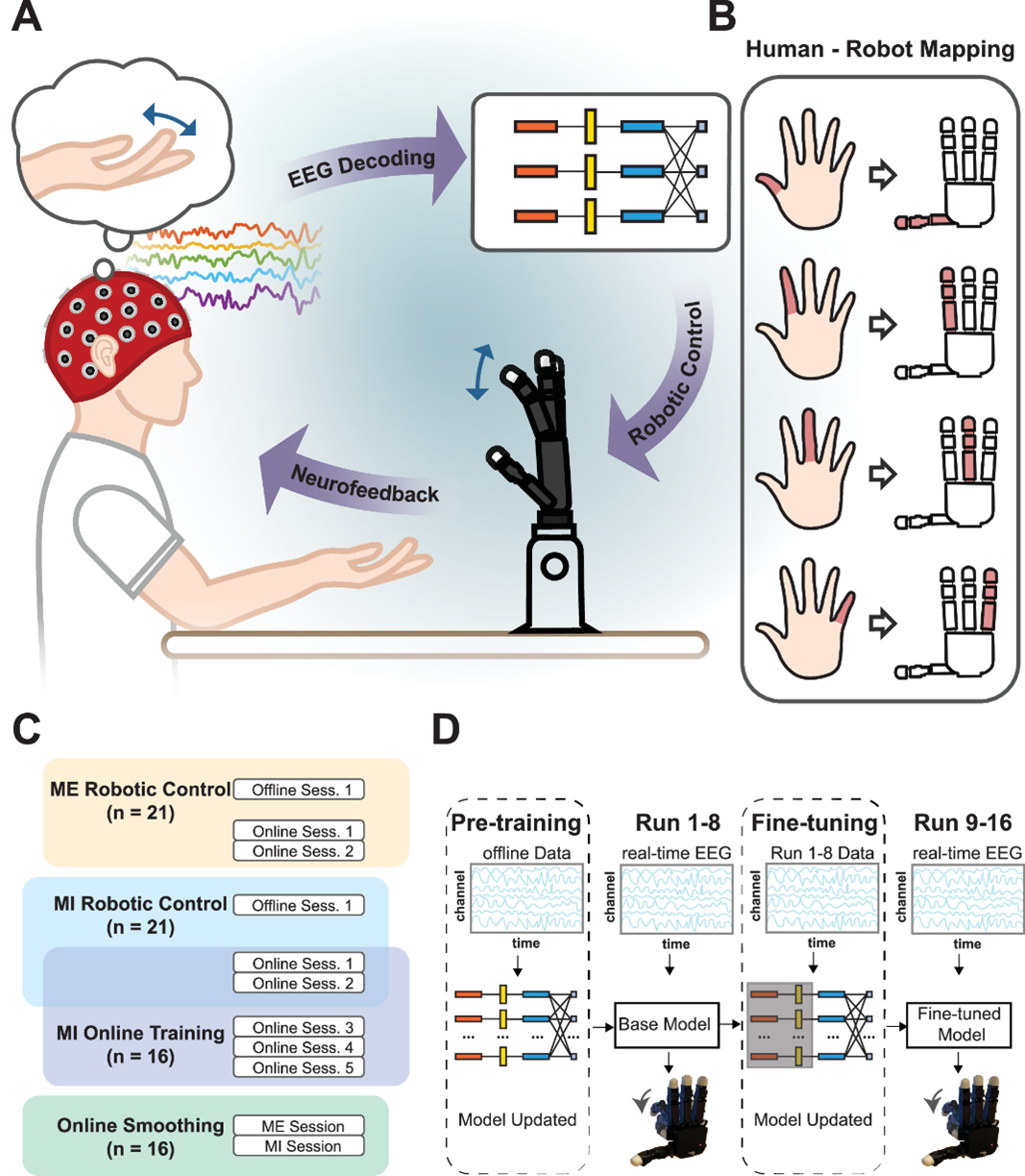
On June 30, the team from the Biomedical Engineering Department at Carnegie Mellon University developed a non-invasive brain-machine interface (BMI) system based on electroencephalography (EEG), which can directly drive the corresponding movements of robotic fingers using brain signals from individual finger movements (ME) or motor imagery (MI). This system decodes brain signals through a deep neural network (EEGNet) and significantly enhances BMI performance through a fine-tuning mechanism, achieving unprecedented fingertip-level precision control. The system developed by the research team utilizes brain signals from ME and MI to decode the user’s intentions into corresponding movements of robotic fingers using the deep learning model EEGNet-8.2, demonstrating significant control accuracy among 21 healthy participants with BMI experience.
The application value of this research mainly lies in the fields of clinical rehabilitation and daily assistive technologies. This brain-machine interface system, using non-invasive, low-cost EEG technology, can be directly transformed into home rehabilitation devices, helping patients perform actions such as grasping and pinching through brain control. The research team states that the long-term goal of the study is to develop practical brain-machine interface applications for users with motor function impairments and able-bodied users, enabling them to interact physically with their environment through brain decoding. In addition to fine motor rehabilitation scenarios, future work will further explore task designs and contexts that are closer to daily use, such as regaining writing and eating functions. The research results were published in Nature Communications, reference:Ding, Y., Udompanyawit, C., Zhang, Y. et al. EEG-based brain-computer interface enables real-time robotic hand control at individual finger level. Nat Commun 16, 5401 (2025). https://doi.org/10.1038/s41467-025-61064-x.
(Source: Brain-Machine Interface Planet)
★
02
University of Science and Technology of China Research Team Develops Hard Magnetic Microrobots
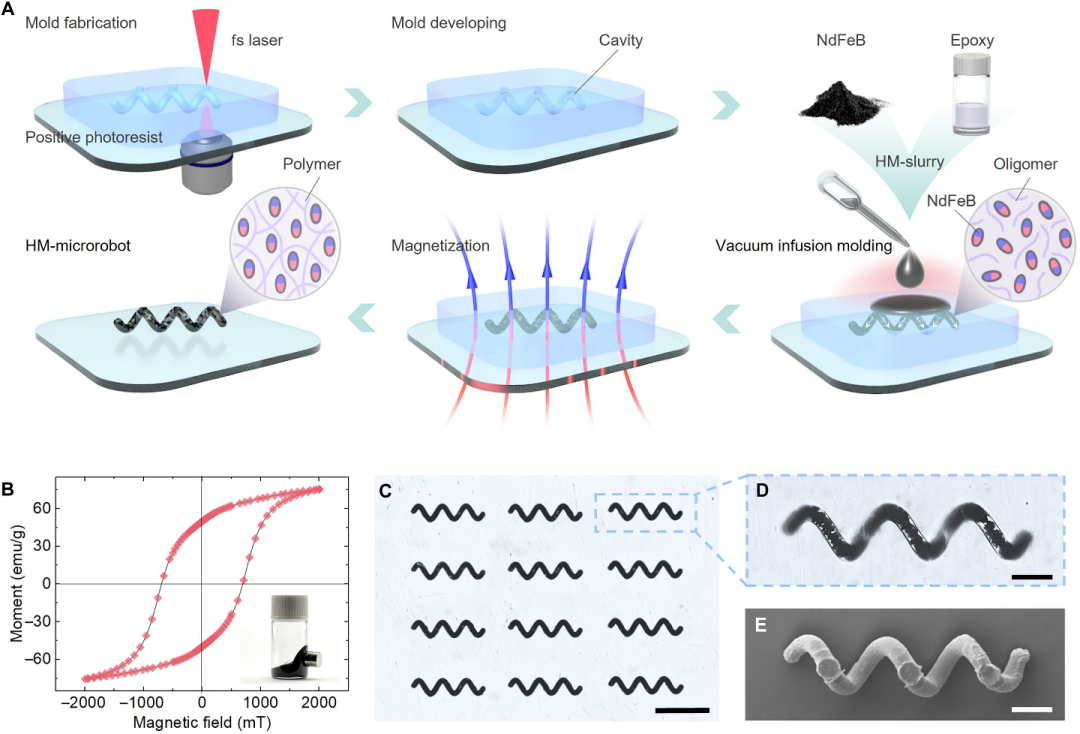
On July 4, the team led by Wang Chaowei at the University of Science and Technology of China developed a hard magnetic microrobot (HM-microrobot) manufactured using femtosecond laser-assisted 3D printing and vacuum infusion molding technology. The research team successfully developed a three-dimensional hard magnetic microrobot containing neodymium-iron-boron (NdFeB) particles by combining femtosecond laser-assisted 3D printing technology and vacuum infusion molding process. These microrobots exhibit high remanence and large coercivity, achieving swimming speeds of up to 22.6 body lengths per second in weak magnetic fields and controllable reverse propulsion in sub-centimeter/second blood flow. By optimizing the manufacturing process, the researchers achieved uniform NdFeB distribution and multi-morphology design of the microrobots, demonstrating their great application potential in complex biomedical environments, especially in intravascular therapy and targeted drug delivery. Nevertheless, future prospects focus on further enhancing the performance of microrobots, addressing biocompatibility and safety issues, expanding functional design and application areas, developing more powerful magnetic drive systems, and promoting the technology’s transition to clinical practice. Through interdisciplinary collaboration and optimized design, hard magnetic microrobots are expected to play a greater role in the biomedical field. The research results were published in Science Advances, reference:Dong Wu et al., Femtosecond laser–assisted printing of hard magnetic microrobots for swimming upstream in subcentimeter-per-second blood flow. Sci. Adv. 11, eadw1272 (2025). DOI: 10.1126/sciadv.adw1272.
(Source: Soft Valley)
★
03
Johns Hopkins University Leads Autonomous Surgery Robot SRT-H to Complete Cholecystectomy
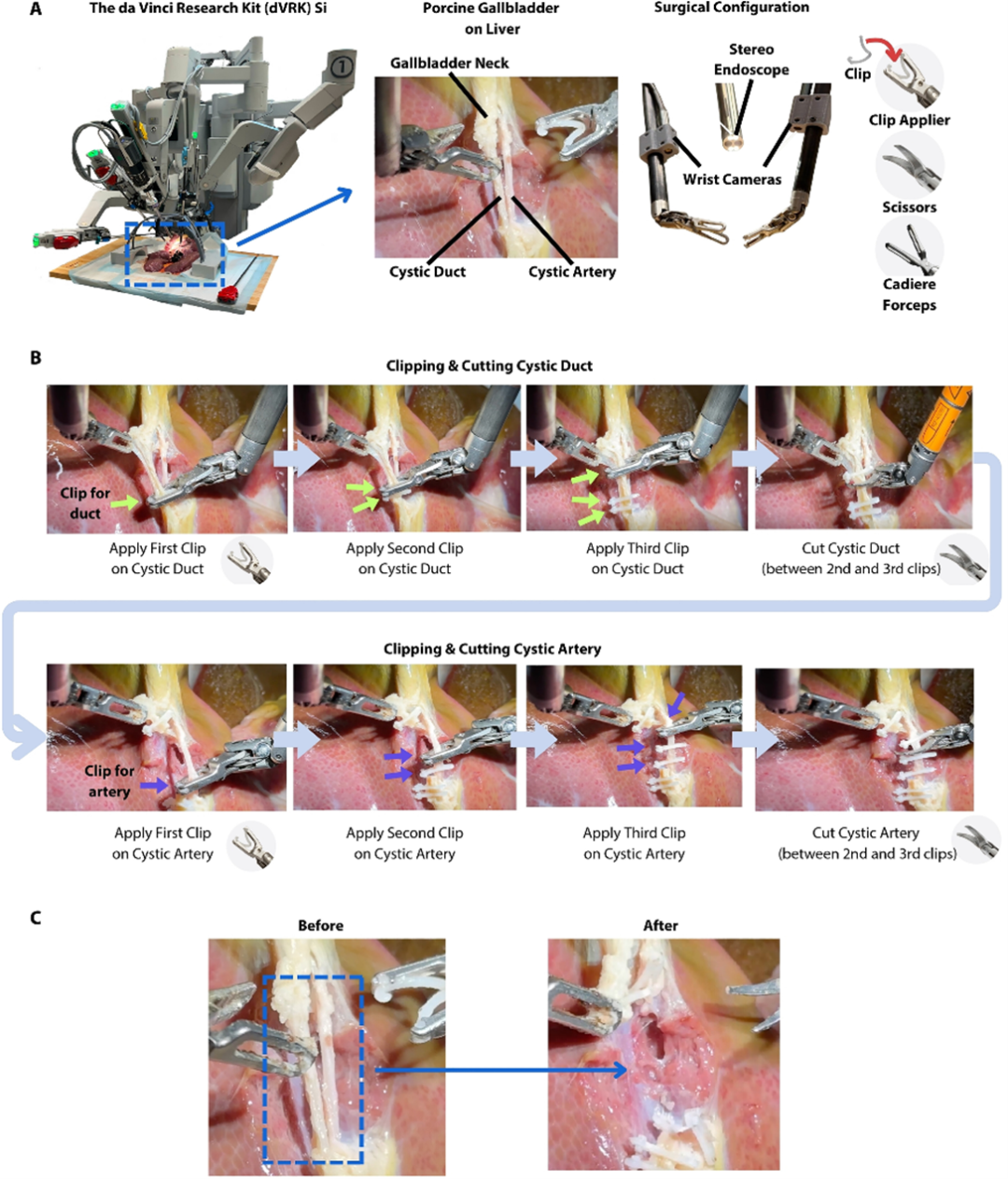
On July 9, the research team at Johns Hopkins achieved fully automated surgery with the robot, completing eight ex vivo pig cholecystectomies without any intervention from a surgeon, achieving a 100% success rate.
The research team first had SRT-H watch videos of clinical surgeons performing surgery on pigs. After completing the learning process, the team provided it with the da Vinci Research Kit (dVRK) Si. During the surgery, SRT-H accurately identified and operated on the gallbladder, which was deliberately chosen for its varying anatomical structures, colors, textures, and vascular pathways. Data from the Johns Hopkins team showed that the SRT-H system achieved a 100% success rate in eight pig model test cases, with an average time of 317 seconds and an average of 6 self-corrections. Following the successful attempt at gallbladder surgery, the research team stated that they would also train and test this system in more types of surgeries in the future. The research results were published in Science Robotics, reference:Ji Woong (Brian) Kim et al., SRT-H: A hierarchical framework for autonomous surgery via language-conditioned imitation learning. Sci. Robot. 10, eadt5254 (2025). DOI: 10.1126/scirobotics.adt5254.
(Source: Robotics Lecture Hall)
★
04
MIT Research Team Develops New Bionic Knee to Restore Natural Movement
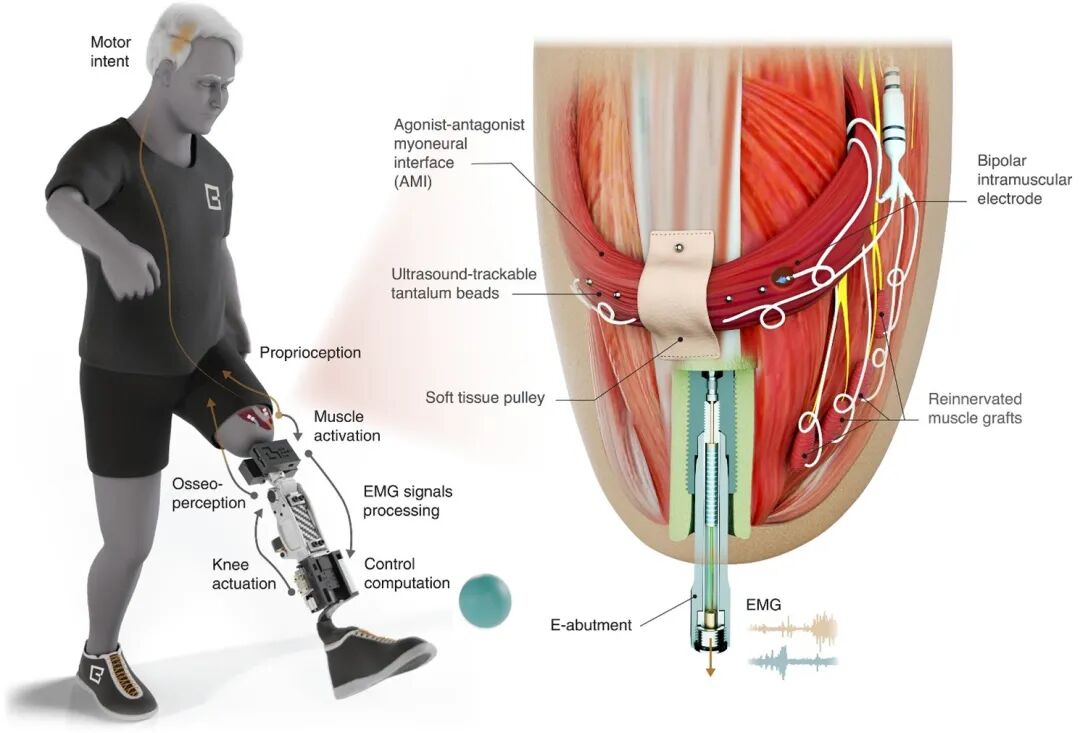
On July 10, Professor Hugh Herr’s team at MIT proposed a bone-integrated mechanical neural prosthesis, whose neural embedding design integrates improved hard and soft tissues with permanently implanted hardware. The research team developed a new bionic knee that enables above-knee amputees to perform actions such as walking quickly, climbing stairs, and avoiding obstacles more easily than with traditional prosthetics. Unlike traditional prosthetics where the residual limb is placed within a receiving socket, this new system integrates directly with the user’s muscle and bone tissue, providing higher stability and giving users greater control and experience of the prosthetic movement.
The research team developed a new surgical method called the “Antagonistic Muscle Neural Interface” (AMI), which reconnects muscle pairs during surgery so that they can dynamically “communicate” within the residual limb. This sensory feedback helps prosthetic users decide how to move their limbs while also generating electrical signals for controlling the prosthetic. Previous researchers have demonstrated that below-knee amputees who underwent AMI surgery could walk faster than those who underwent traditional below-knee amputation surgery, and could navigate obstacles more naturally. In this new study, the method was further upgraded, and they developed a surgical procedure to insert a titanium rod into the residual femur at the amputation site. This implant provides better mechanical control and load-bearing capacity than traditional prosthetics. Additionally, the implant contains 16 wires that collect information from electrodes on the AMI muscles, allowing for more accurate transmission of signals from the muscles. Currently, the Antagonistic Muscle Neural Interface (AMI) surgery is routinely applied to below-knee amputees at Brigham and Women’s Hospital. The research results were published in Science, reference:Tony Shu et al., Tissue-integrated bionic knee restores versatile legged movement after amputation. Science 389, eadv3223 (2025). DOI: 10.1126/science.adv3223.
(Source: Robotics Technology and Applications)
★
05
Cornerstone Robotics Completes Autonomous Surgery Verification in Clinical Scenarios with the Conostent Surgical Robot
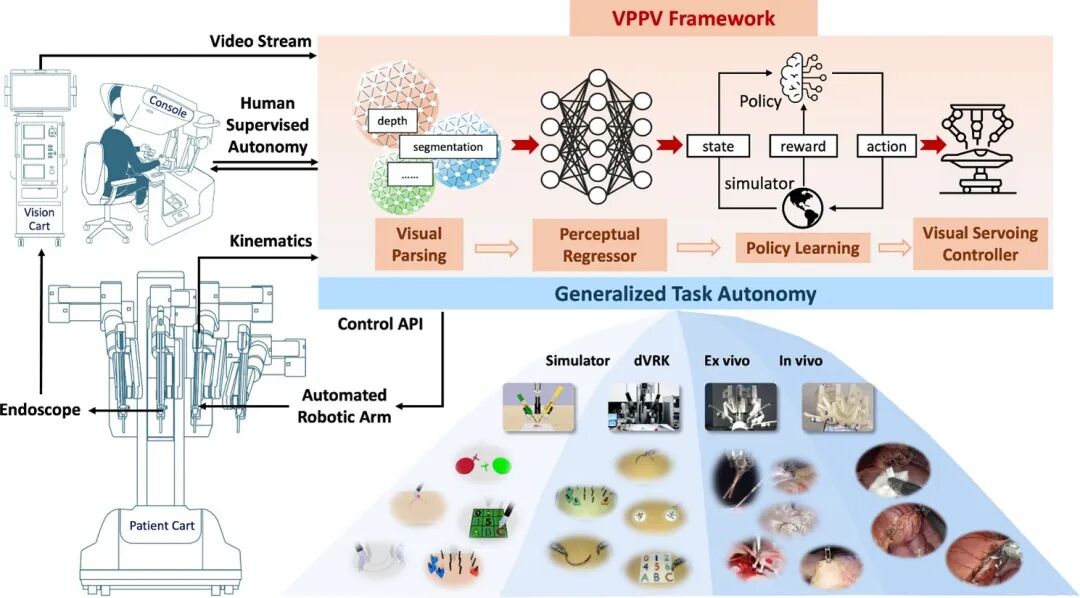
On July 16, Cornerstone Robotics and the research team from the Chinese University of Hong Kong jointly developed a multifunctional automated embodied intelligent platform for surgical robots, successfully completing autonomous surgery verification in clinical scenarios with the Conostent-developed Sentire laparoscopic surgical robot. The research constructed a new paradigm of embodied intelligence for surgical task automation, VPPV (Visual Parsing, Perceptual Regressor, Policy Learning, Visual Servoing Controller), which integrates the robust perception capabilities of visual foundation models, the policy generalization capabilities of reinforcement learning paradigms, and the hierarchical fusion architecture of AI strategies with traditional control, achieving new breakthroughs in the stability, flexibility, and iterability of autonomous robotic operations.
The research results can rely on the visual input from the surgical robot’s own endoscopic system, completing the entire process from target recognition, state regression, policy decision-making to action servo without any additional sensors, demonstrating strong deployment convenience; it features panoramic perception, multi-task generalization, fine servo closed-loop, and human-machine collaboration, significantly lowering the threshold for research and clinical application, setting a new benchmark for the next generation of intelligent surgical assistants. The research team trained multiple AI strategies with generalization capabilities based on their self-developed open-source simulation platform SurRoL, successfully achieving “zero-shot transfer”. This platform integrates multi-modal perception, real physical modeling, and multi-task operation training, covering surgical robot control interfaces, simulation environments, and reinforcement learning engines. SurRoL has been made publicly available as open-source, providing a complete ecosystem with openness and engineering value for surgical robot AI research. The research results were published in Science Robotics, reference:Yonghao Long et al., Surgical embodied intelligence for generalized task autonomy in laparoscopic robot-assisted surgery. Sci. Robot. 10, eadt3093 (2025). DOI: 10.1126/scirobotics.adt3093.
(Source: Cornerstone Robotics)
★
06
Shenzhen Institute of Advanced Technology Develops Photoacoustic/Ultrasound Non-invasive Brain-Machine Interface for Free-Moving Neurovascular Coupling Imaging
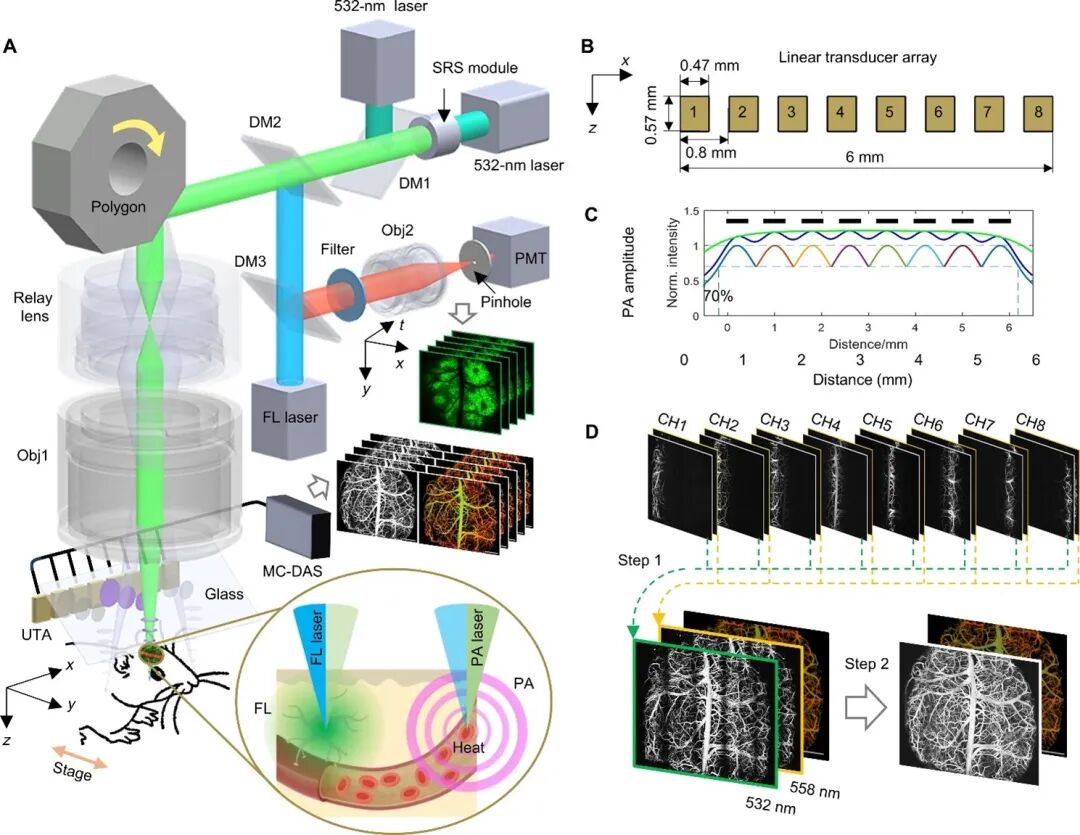
On July 23, the team led by Academician Zheng Hairong, Researcher Liu Chengbo, and Researcher Zheng Wei at the Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences, developed a 1.7-gram head-mounted imaging microscope that achieves synchronous high spatiotemporal resolution imaging of neuronal activity and blood oxygen metabolism in freely moving mice, providing new ideas for exploring the neurovascular coupling mechanism and developing brain-machine interface technology. The research team achieved efficient integration and synchronization of confocal fluorescence microscopy (CFM) and photoacoustic microscopy (PAM) through miniaturized design, constructing a dual-modal imaging probe weighing only 1.7 grams, capable of achieving high spatiotemporal resolution neurovascular synchronous imaging in freely moving mice. The imaging resolution reaches 1.5 microns, with an imaging speed of 0.78 Hz and a field of view of 400 microns × 400 microns. Through innovations in system hardware and algorithms, brain blood oxygen metabolism imaging was achieved, and neuronal calcium signal activity was recorded synchronously.
This research first achieved synchronous high spatiotemporal resolution imaging of neuronal activity and hemodynamics in freely moving mice, providing new ideas for elucidating the neurovascular coupling mechanism and developing a new generation of brain-machine interface technology. Future research can continue to advance in both imaging technology and brain-machine interface applications. The research results were published in Science Advances, reference:Liangjian Liu et al., Photoacoustic and fluorescence hybrid microscope for cortex-wide imaging of neurovascular dynamics with subcellular resolution. Sci. Adv. 11, eadw5275 (2025). DOI: 10.1126/sciadv.adw5275.
(Source: Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences)
★
07
Meta Develops a Universal Non-invasive Neuromotor Wristband for Human-Computer Interaction
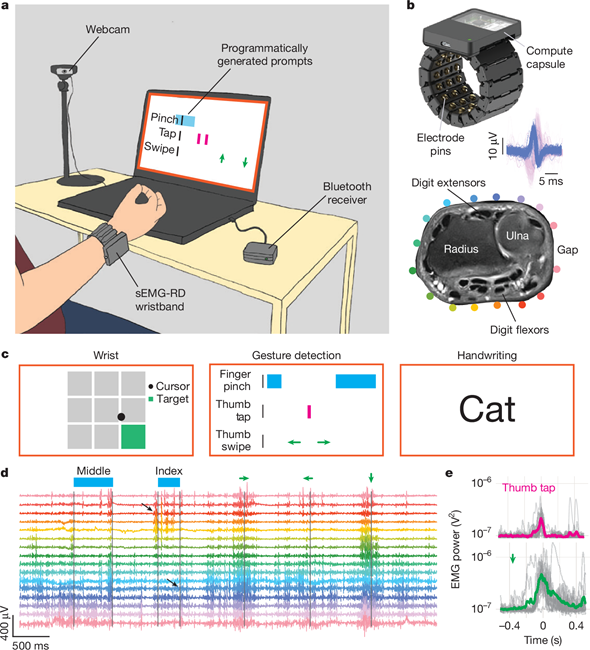
On July 23, Meta’s Reality Labs published a new achievement, a universal non-invasive neuromotor interface that can decode computer inputs through surface electromyography (sEMG). Combined with a wristband, this makes “thought control” a reality, along with a scalable infrastructure for collecting training data from thousands of consenting participants. This data collectively aids in developing a generalizable sEMG decoding model across different populations.
Performance tests of users showed a median performance of 0.66 target acquisitions per second in closed-loop gesture decoding tasks; median performance of 0.88 gestures per second in discrete gesture tasks; and handwriting input speeds of up to 20.9 words per minute. With personalized sEMG decoding models, the handwriting model’s decoding performance can be further improved by 16%. In the clinical field, this interaction design, which requires minimal muscle activity rather than specific actions, is expected to provide feasible interaction solutions for those with limited mobility, muscle weakness, or loss of limbs, and promote the development of effective closed-loop neurorehabilitation paradigms. The research results were published in Nature, reference:Kaifosh, P., Reardon, T.R. & CTRL-labs at Reality Labs. A generic non-invasive neuromotor interface for human-computer interaction. Nature (2025). https://doi.org/10.1038/s41586-025-09255-w.
(Source: DeepTech)
★
08
Zhejiang University Research Team Releases AI Remote Collaboration Bronchoscopy Robot
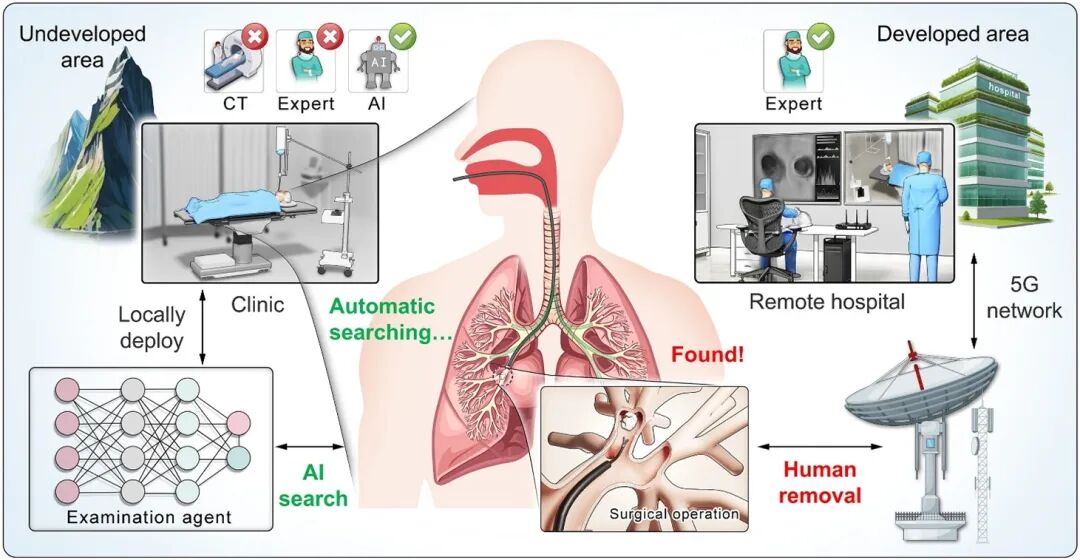
On July 30, the research team from the School of Control Science and Engineering at Zhejiang University, in collaboration with the First Affiliated Hospital of Zhejiang University and University College London (UCL), successfully developed an AI bronchoscopy robot system that can be remotely controlled without CT scans, innovatively achieving an “AI autonomous search + physician remote collaboration” solution for foreign body aspiration treatment. This system features portability, low cost, and high intelligence, and for the first time demonstrated the autonomous capability of AI-driven robots in foreign body localization tasks in real animal experiments, as well as the clinical feasibility of 5G remote control for foreign body retrieval, filling the gap in emergency foreign body aspiration treatment methods in underdeveloped areas, providing a new technical solution for global emergency medical care.
Last January, the research team published an AI co-pilot-assisted bronchoscopy robot, overcoming technical difficulties from no autonomy (L0) and assisted guidance (L1) to partial autonomy (L2), and validated the robot’s effectiveness and safety in live pig lungs. Building on this research, the team further upgraded the assisted driving to AI cooperation, allowing the robot to possess higher-level autonomous exploration capabilities (L3), transforming the robot from a tool requiring full physician intervention to an intelligent agent that can collaborate with doctors. This research not only demonstrates the strong potential of AI in minimally invasive diagnosis and treatment but also opens a new chapter for medical robots to transition from “assistants” to “collaborators”. With the improvement of computing power and communication infrastructure, similar “AI-physician collaboration” surgical models are expected to be widely applied in various disease scenarios. The research results were published in Science Robotics, reference:Lilu Liu et al., AI search, physician removal: Bronchoscopy robot bridges collaboration in foreign body aspiration. Sci. Robot. 10, eadt5338 (2025). DOI: 10.1126/scirobotics.adt5338.
(Source: Zhejiang University School of Control Science and Engineering)
★
09
Harvard University Research Team Develops Personalized Wearable Robot Control to Improve Impaired Arm Function
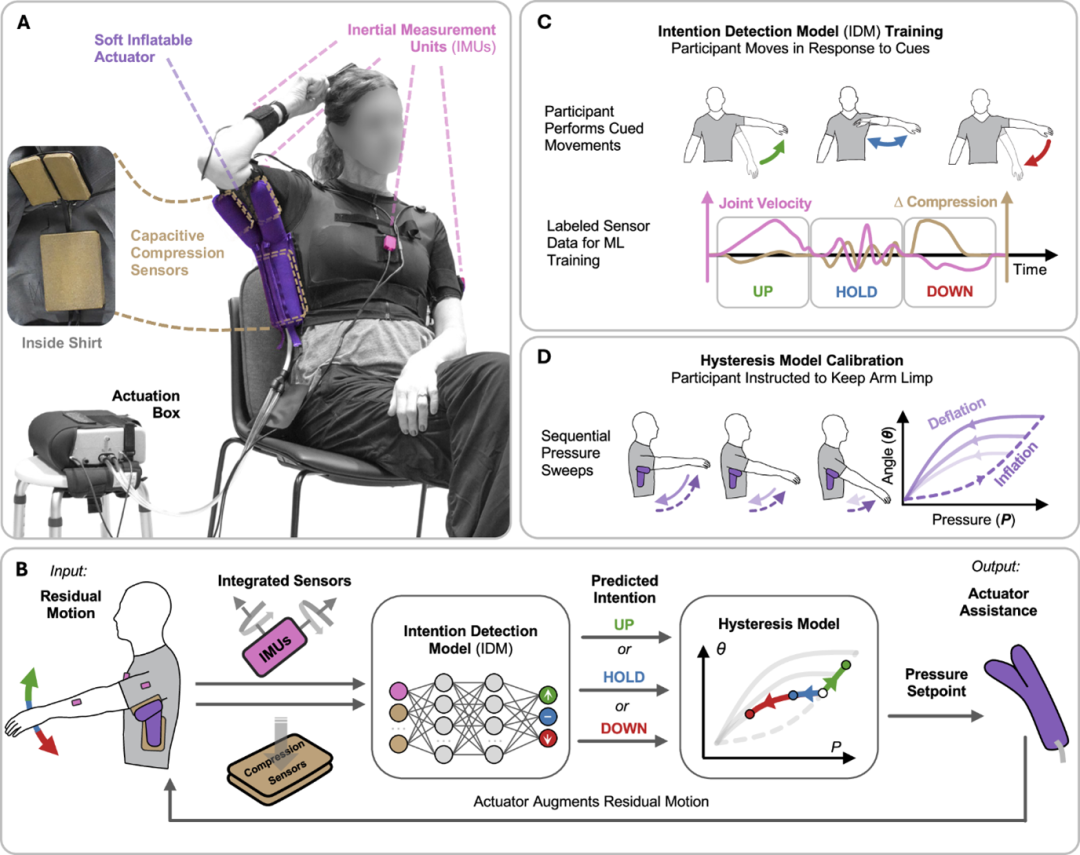
On August 2, the Harvard University research team developed a personalized control strategy for a wearable robot based on machine learning (ML), significantly enhancing the assistive effects on upper limb function. Based on functional conductive polymers, the research team designed functional polyaniline-based sequential adhesive hydrogel patches that can achieve synchronized mechanical physiological monitoring and electrical coupling treatment of the heart, firmly adhering to the heart’s surface to monitor its mechanical movements and electrical activities. This research targeted five stroke patients and four ALS patients, developing and validating a personalized machine learning control strategy to enhance the inflatable soft shoulder exoskeleton’s assistive effects on the upper limb function of patients with movement disorders. The core innovation lies in the integration of intention recognition models with physical lag models to achieve adaptive assistive control. The research results were published in Nature Communications, reference:Arnold, J., Pathak, P., Jin, Y. et al. Personalized ML-based wearable robot control improves impaired arm function. Nat Commun 16, 7091 (2025). https://doi.org/10.1038/s41467-025-62538-8.
(Source: Brain-Machine Interface Community)
★
10
Stanford University Team Achieves Breakthrough in “Mind Reading” Level Brain-Machine Interface
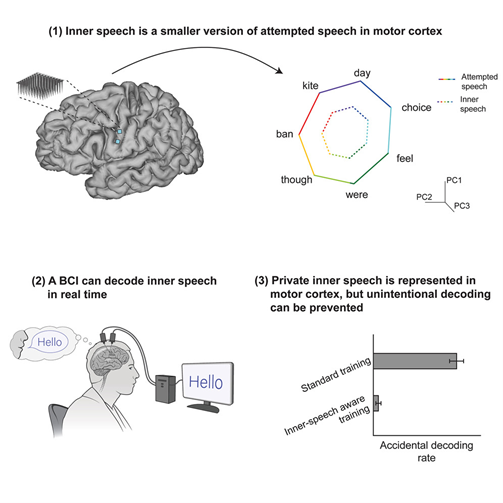
On August 14, the Stanford University team published a milestone new achievement in brain-machine interfaces, achieving a breakthrough in “mind reading” level brain-machine interfaces. Researchers successfully decoded the neural code of inner speech using microelectrode arrays in the motor cortex, creating a “thought-speaking” system for completely locked-in patients. This groundbreaking work not only constructed a real-time inner speech decoder with a vocabulary of 125,000 words but also uncovered the mystery of shared neural representations between “attempted speech” and “inner monologue”. Furthermore, researchers achieved the ability to distinguish between active expression and private thought through “neural fingerprints” and designed a keyword locking mechanism to protect user thought privacy. This achievement marks a new stage in brain-machine interfaces, transitioning from “motor decoding” to “thought decoding”. The research results were published in Cell, reference:Kunz EM, Abramovich Krasa B, Kamdar F, et al. Inner speech in motor cortex and implications for speech neuroprostheses. Cell. 2025;188(17):4658-4673.e17. doi:10.1016/j.cell.2025.06.015.
(Source: Brain-Machine Interface Community)
★
11
Huazhong University of Science and Technology Professor Tao Guangming’s Team Develops Magnetic-Controlled Infrared Laser Ablation Fiber Robot
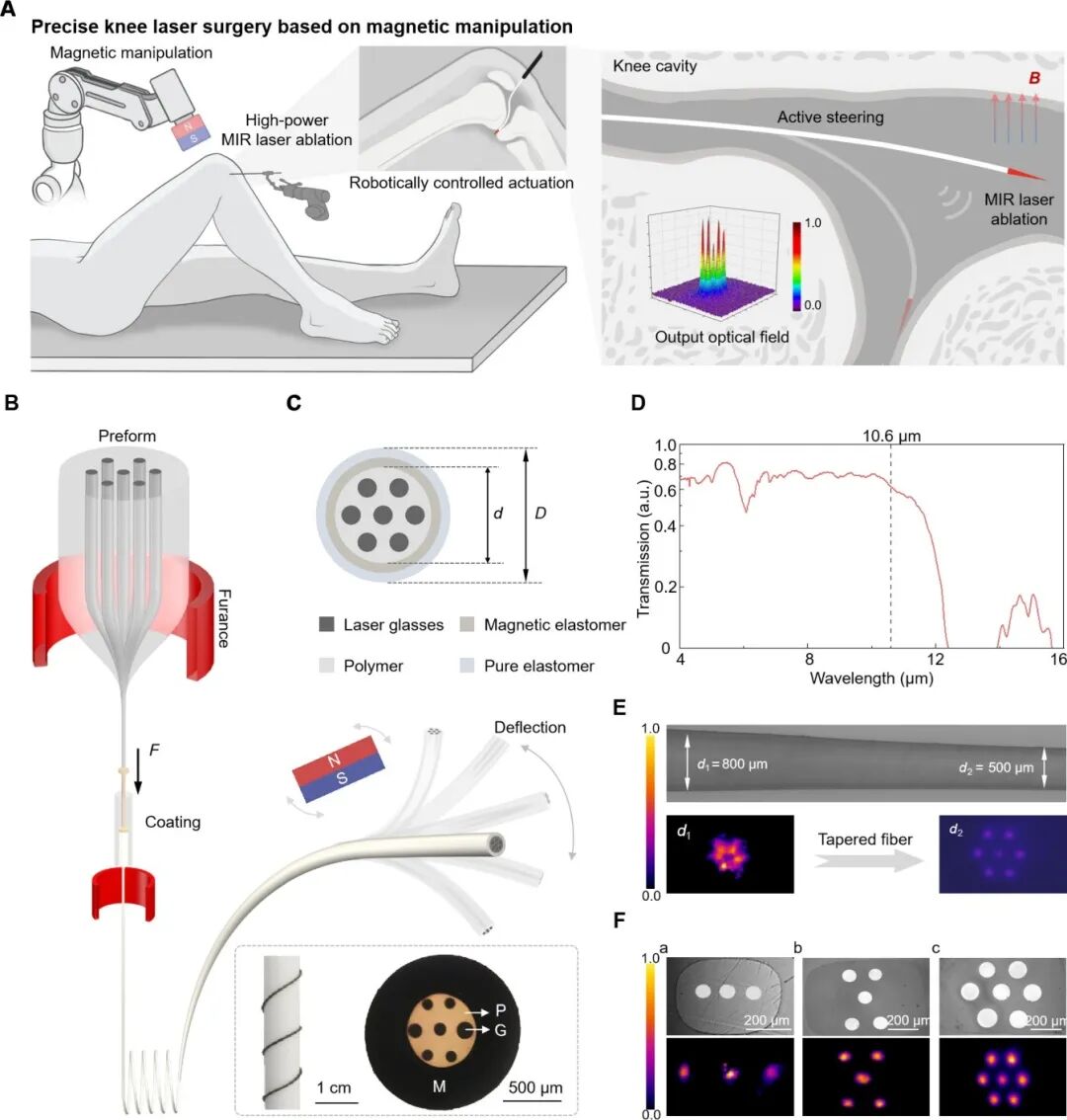
On August 27, Professor Tao Guangming’s team at Huazhong University of Science and Technology made new progress in the field of medical continuum robots, developing a magnetic-controlled infrared laser ablation fiber robot for precise minimally invasive knee surgery. This technology aims to achieve robotic precision CO2 laser surgery within the knee joint cavity through minimally invasive means. The magnetic-controlled multi-material fiber robot developed by the research team has high controllability and efficient CO2 laser ablation capabilities, capable of executing precise and flexible ablation tasks through remote magnetic drive within the complex knee joint cavity. The research team conducted laser navigation and ablation experiments in ex vivo pig knee joints to assess its control stability and adaptability in actual biological structures; they performed point and linear laser ablation operations in the femoral region of live rats, verifying the fiber robot’s positioning accuracy and selective ablation effects at the soft-hard tissue interface. These experimental results provide technical support for its future clinical translation in various types of intraluminal minimally invasive surgeries.
The magnetic-controlled multi-material fiber robot developed by the research team achieves high integration in precise delivery and efficient laser tissue ablation, providing a new solution for minimally invasive surgery in complex structures such as the knee joint. It can not only complement traditional arthroscopic techniques but also demonstrates application potential in broader fields (such as spinal minimally invasive surgery, endoscopic interventional therapy, etc.). The research results were published in Science Advances, reference: Yuqi Zou et al., Magnetically actuated multimaterial fiberbot for precise minimally invasive knee laser surgery. Sci. Adv. 11, eadt1809 (2025). DOI: 10.1126/sciadv.adt1809.
(Source: Polymer Science and Technology)

END

Disclaimer: To comprehensively organize information related to the medical robotics industry, some images and texts are sourced from the internet. If there is any infringement, please contact us for removal.


Shanghai Jiao Tong University Institute of Medical Robotics
Scan the QR code to follow us~