Research Background
Continuous wearable monitoring devices and systems are crucial not only for diagnosing physical conditions but also for predicting pathological states, enabling early and effective interventions. Accelerometers are essential components in many electronic systems, from consumer electronics to healthcare systems. Traditional wearable motion devices are inherently inflexible and unsuitable for seamless integration with the human body. To address the mechanical mismatch between rigid electronic devices and living tissues, many researchers have recently focused on developing physically compatible wearable devices that utilize emerging materials for reliable health data monitoring and seamless human-machine soft interfaces, while considering user comfort. Monitoring physical activity is one of the important health biomarkers that can provide information about the musculoskeletal system status, gait, movement, spatial positioning, motor function assessment, and human-machine interaction. Furthermore, motion monitoring provides much-needed contextual information for other epidermal health sensors (such as temperature, humidity, respiration, and heart rate). Since all the aforementioned life signals are influenced by physical activity, synchronized monitoring of motion complements this data and enables a more accurate analysis of the wearer’s physical condition. Compared to other sensors, motion/physical activity sensors have not been widely studied in the field of flexible and soft electronics. Existing inertial motion sensors and accelerometers rely on rigid beams and complex structures, requiring complicated manufacturing techniques, which limit their applications in soft wearable devices and interfaces. Moreover, over time, these solid spring-like silicon structures may suffer from mechanical fatigue. It is noteworthy that there have been multiple attempts to develop flexible sensors to monitor human movements/gestures, but they are primarily limited to connecting flexible sensors to certain joints or peripheral devices of the body; however, limb movements do not accurately reflect the overall range of motion/activity of the body. Therefore, there is an urgent need for an independent, fully soft inertial motion sensor that can provide continuous skin conformal interfaces and functions at a low cost. In recent years, advancements in soft electronic technology have prompted efforts to develop fully soft inertial motion sensors based on capacitive, piezoelectric, and unstable mechanisms, using emerging printing technologies such as laser cutting, inkjet printing, aerosol jet printing, etc. However, most of them still rely on incorporating solid mass into the printed sensor architecture, which imposes mechanical constraints and fragility on the structure. Liquid metal droplets are an attractive soft mass material; however, existing liquid metal inertial sensors either utilize physically rigid sensor structures or are used to measure tilt and inclination angles. To address this unmet need and simplify device fabrication, we propose and demonstrate a soft inertial sensor based on liquid metal (LM) mass that is integrated with a multifunctional platform for wireless monitoring of motion, temperature, humidity, and respiration patterns. Tables S1 and S2 highlight the materials and performance characteristics used in our developed platform compared to other recently developed flexible inertial sensors. The developed inertial sensor utilizes emerging material combinations and sensor configurations to achieve very desirable sensor performance. The non-adhesive graphene-coated liquid metal droplets combined with porous LIG resistive electrodes create interdigitated electrodes, where the non-wetting nature of LIG ensures that the proof mass exhibits high fluidity, allowing the LM proof mass to have high fluidity. This enables the sensor to operate within an acceleration range of 1 ~ 30 m/s² and a low-frequency range of up to 0.167 Hz, demonstrating a high sensitivity of 6.52% m-1 s2. We have integrated the developed inertial sensor with other LIG-based health monitoring sensors, such as temperature, humidity, and respiration pattern sensors, enhancing its multifunctionality. In recent years, laser-induced graphene has gained increasing attention in the field of flexible biosensors due to its maskless, customizable, and low-cost manufacturing process. Graphene, as a two-dimensional nanomaterial, possesses attractive properties such as good conductivity, mechanical, optical, and thermal performance. The platform is connected to a programmable system on chip and a power unit, enabling it to function as an independent system for signal transduction, processing, and transmission in the field. By optimizing different sensor parameters such as electrode design and width, the platform serves as a proof-of-concept platform, demonstrating real-time monitoring capabilities in areas such as human health monitoring, legged robot physical activity, and human-machine soft interfaces. By coating the surface of the liquid metal with graphene particles, we address the challenges of developing robust soft inertial sensor manufacturing strategies based on LM while providing the non-adhesive and high conductivity of the droplets.
Research Results
Liquid metal (LM), such as eutectic gallium-indium (EGaIn) alloy, has been widely studied in the field of soft electronics and is a biocompatible soft mass material with excellent electromechanical properties. (27 – 32) However, EGaIn has a natural oxide layer that firmly adheres to almost all surfaces it contacts, limiting its fluidity and restricting its use as a movable soft floating contact or mass. (33,34) Recently, some studies have explored strategies to remove this natural oxide layer, such as mixing it with water (35) and glycerol (36), and coating its surface with polytetrafluoroethylene particles. However, these strategies either compromise the electrical conductivity of liquid metal or utilize irritating chemicals. A recently reported method involves coating graphene particles onto EGaIn droplets. The graphene coating on liquid metal has advantages as it enhances its mechanical properties and forms a three-dimensional interpenetrating nest-like shell around the droplet core, making it non-wetting to most surfaces while maintaining high conductivity. Based on this, we coated liquid metal droplets with LIG particles and combined them with highly robust LIG interdigitated resistive sensing elements. The graphene-coated EGaIn is suitable for conductive sensing mechanisms as it has a graphene coating on the outside and a deformable LM core on the inside. By combining the graphene-coated EGaIn droplet mass with the resistive structure of the LIG interdigitated electrodes and confining the droplet within a fluid channel, a vibrating space can be created, allowing the proof mass to respond to the applied external acceleration and move freely on the resistive electrodes. When the LM mass moves across the span of the resistive electrodes, it adjusts the resistance of the electrodes, which can be easily measured and correlated with the corresponding external acceleration. To enhance the non-wetting of LM within the channel, the surface of the PDMS channel was textured using a CO2 laser to increase the surface roughness and hydrophobicity of the PDMS channel, facilitating droplet migration. The conceptual schematic of the developed wireless multifunctional platform is shown in Figure 1a, describing the layers that make up the platform, including an integrated programmable system on chip (PSoC). The PSoC can wirelessly transmit real-time data to nearby smartphones via a customized mobile application. The optical photo of the fabricated multifunctional integrated platform is shown in Figure 1b. Figure 1c shows a close-up observation of the graphene-coated EGaIn droplets residing on the porous LIG resistive electrodes within the PDMS channel. The optical photos corresponding to the fabricated LIG resistive electrodes are shown in Figures 1d,e. Other optical photos of the platform substrate and inertial sensor can be seen in Figures S1 and S2. The resistive interdigitated electrode design of the porous LIG network was used as the active sensing material of the sensor, and due to droplet movement, the resistance of this sensor varies from ~ 200 to ~ 3k Ω. Figure 1f depicts the flowchart of the manufacturing process for the developed multifunctional platform based on LIG. Laser writing, as a fast and scalable laser patterning technique, was used in the manufacturing process of the platform, including the printed layout traces of the PSoC. Polyimide was used as the substrate material, as it can be easily irradiated by conventional CO2 lasers, resulting in high-quality, multifunctional laser-induced graphene structures. Additionally, when the LIG surface is highly hydrophobic, it is prepared in ambient air (40), which improves the fluidity of the LM droplets and its non-wetting properties on the LIG surface. When the liquid metal droplets are placed on the LIG resistive electrodes using a customized belt rotation stage, cyclic rolling tests were performed; the footage shows the high hydrophobicity and mobility of LM on the PI surface (Movie S1). Silver (Ag) paste was used for electrical contacts and LIG traces for the PSoC contacts. PDMS was selected as the channel material, strain sensor substrate, and final encapsulation layer for the platform. In terms of channel material, PDMS is a hydrophobic biocompatible material that, when textured with laser, exhibits non-adhesive and non-wetting surface characteristics to LM, making it suitable for allowing the mass to move freely within the channel (Movie S2). PDMS is also a suitable candidate material for strain-type sensors as it allows the LIG-transmitted PDMS structure to stretch and bend, leading to high resistance changes caused by strains induced by the human chest wall. Steps shown in Figures S3 and S4 were used to fabricate the PDMS channel layer and the PDMS-based strain sensor. Finally, a thin layer of PDMS was used to encapsulate the platform, securing the assembled components in place and providing long-term mechanical protection for the platform. A top view of the LIG resistive electrodes and graphene-coated EGaIn LM droplets is shown in Figure 2a. The schematic diagram of the working principle of the resistive sensor based on inertial LM is shown in Figure 2b. When an external acceleration is applied, the liquid metal droplets move accordingly due to the opposing inertial driving force. The driving force acts in the opposite direction to the externally applied acceleration, with a magnitude of m × a, where m is the mass of the proof mass droplet and a is the externally applied acceleration. According to the D’Alembert principle, all forces acting on the specimen equal the inertial force acting on the specimen. Therefore, the control equation describing the dynamics of the droplet moving on a plane surface under external acceleration can be represented as:
Where m is the mass of the droplet, y is the displacement of the accelerometer relative to the reference frame, x is the relative displacement of the droplet with respect to the reference frame. The friction force is the force generated by the friction between the liquid metal and the channel surface and air damping, assumed to be linearly related to the droplet velocity, with b being the damping/friction coefficient. The motion of the droplet is controlled by inertial driving force, capillary force, and friction force. The second derivative of y with respect to time is the external acceleration acting on the object, denoted as a, and equation 1 can be rewritten as:
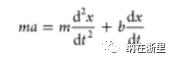
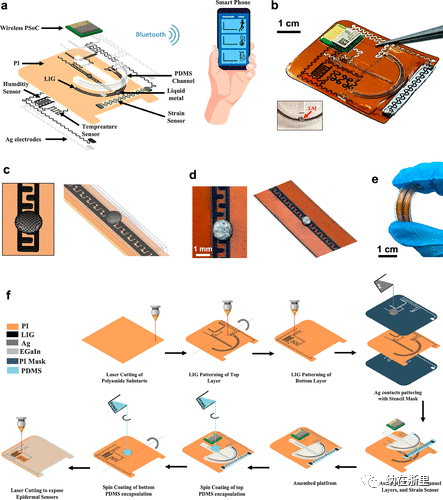
Figure 1. Conceptual illustration, exploded view, photos, and the manufacturing of the multifunctional LIG platform. (a) Conceptual diagram of the multifunctional wireless platform showing the exploded view of different layers that constitute the platform, including inertial, temperature, humidity, and respiration sensors. (b) Optical photo of the manufactured multifunctional platform; the illustration shows LM placed within the curved pattern of the PDMS channel. (c and d) 3D diagram and optical photo of the fabricated laser-induced graphene interdigitated resistive electrodes and the liquid metal droplets covered with graphene. (e) Photo of the synthetic LIG substrate with PDMS channel. (f) Flowchart of the manufacturing process followed for the developed multifunctional platform.
Figure 2. Droplet dynamics and material characterization. (a) Top view of the resistive LIG electrodes. (b) Side view schematic of the proposed inertial liquid metal-based sensor, showing the position of the LM proof mass in static and accelerated states, along with the forces acting on it when acceleration is applied. (c) Schematic diagram of the working mechanism of the resistive sensor and the equivalent circuit of the LM droplet enabling variable resistance concept along with its corresponding measurement setup. (d) Top microscopic image showing the digital LIG resistive electrodes and the LM droplets located on it. (e) Cross-sectional scanning electron microscope (SEM) image showing the porous LIG network generated on the irradiated polyamide film. (f) High-magnification top view SEM image showing the generated graphene sheets. (g) Raman spectrum of the LIG electrode obtained with a laser wavelength of 473 nm.
Figure 2h shows the coating process of the graphene-coated EGaIn droplets. The surface of the EGaIn liquid metal droplets was coated by rolling the LM droplets on a track filled with LIG particles, as shown in Figure S5. The LIG particles partially insert or fill into the passivated native oxide of the LM, forming a nest-like graphene structure that serves as a conductive slip layer, enhancing the mechanical properties and mobility of the LM, as shown in Figure 2h. In contrast, the contact angle of bare EGaIn droplets on the PDMS substrate is around 48°, indicating low hydrophobicity, while the measured contact angle of the graphene-coated EGaIn droplets is 126°, indicating high hydrophobicity.
Through testing, we studied the effects of different materials used in this platform on the hydrophobicity and non-adhesive properties of EGaIn droplets, including LIG, PI, PDMS, and textured PDMS. Photos in Figure S9 show the LM droplets retracting from each test surface before and after. Bare PDMS is the only surface that exhibited poor non-adhesive properties, as evidenced by the retraction of droplets from the surface due to residual observed on the surface. The environmental scanning electron microscope (ESEM) images of bare EGaIn droplets and graphene-coated EGaIn droplets on the top surface are shown in Figures 2k and l, respectively. It can be seen that the surface of bare LM droplets is smooth with a native oxide surface, while the coated surface has graphene sheets adhering to the native oxide layer. The microscopic photo in Figure 2m shows the nest-like structure formed at the edge of the LM droplets, and Figure 2n shows the high-magnification SEM image of the surface clearly showing the graphene sheets on the LM droplets, creating a hydrophobic coating for the LM.
Furthermore, to demonstrate the significant role of the laser-induced graphene particle coating on the non-wetting properties of LM droplets, dynamic droplet rolling tests were performed on inclined PI substrates with lgal-coated and uncoated EGaIn droplets. The results indicated that the coated droplets rolled easily on the PI substrate, while the bare droplets remained stationary due to adhesion to the substrate (Movies S9). To visually demonstrate the working principle of the resistive LM-based electrode, a blue LED was connected to the LM-based resistive LIG sensor as part of a voltage divider circuit, where the resistive electrode is combined with the floating electrode of the LM-coated LIG droplet, controlling the amount of voltage and current input to the LED, thereby controlling its brightness (Movie S3). As shown in Figures 3a,b, when the LM is located in the upper half of the electrode, the resistance of the electrode is very high, reducing the current input to the LED, causing the LED to turn off. However, when the LM droplet moves to the lower half of the electrode, the brightness of the LED increases as the resistance decreases, and the voltage and current input to the LED increase, respectively. In practical long-term applications, this measurable resistance change must be reproducible. Figure 3c shows the signals’ reproducibility when the inertial sensor is placed on a custom rotating platform shown in Figure S10. The inertial sensor exhibited highly stable resistance changes and signal reproducibility over 12,500 cycles without being affected by hysteresis or fatigue. Additionally, further reliability tests were performed on the fabricated electrodes, such as water resistance demonstrations, where the resistance of the LIG electrodes remained unchanged even after immersing the sensor in water (Movie S4). Mechanical bending tests were conducted, with results shown in Figures S18 and S19, verifying that the sensor remained reliably functional even after experiencing up to 1000 bending and straightening cycles with a radius of up to 15 mm. To characterize the performance of the inertial sensor in measuring accelerations of different amplitudes and frequencies, the sensor was placed along with a reference MEMS accelerometer (BNO055, BOSCH) on a belt-driven linear actuator, as shown in Figure S11. Figure 3f shows the output resistance changes of the sensor when random accelerations are applied (ΔR/R0). The overall response of resistance change in the sensor correlates with the acceleration applied due to the continuous vibration of the high-moving LM within the channel. The randomly applied acceleration values ranged from 8 to 30 m/s². In Figure 2e, two identical inertial sensors were placed vertically, corresponding to the x-axis and y-axis, as shown in Figure S11a. The frequency of the acceleration was 0.5 Hz, with magnitudes ranging from 8 ~ 11 m/s². When acceleration is applied to each axis, the responses of the two sensors can be clearly distinguished, showing lower cross-axis sensitivity. Considering that the platform is used to monitor human motion, we used low-frequency acceleration in the range of 0.5-3 Hz to test the sensor’s response (Movie S5). (43) Parts f-h in Figure 3 show the corresponding resistance changes when applying 10 m/s² acceleration at different frequencies of 0.5, 1.5, and 2 Hz. The output of resistance changes corresponding to this experiment is shown in Figure S12. When additional frequency values such as 0.167 and 2.58 Hz were accelerated, the output results are shown in Figure S13. The linear response of resistance change of the sensor with increasing acceleration is shown in Figure 3i. At a frequency of 1.5 Hz, when the acceleration values ranged between 4-12 m/s², the calculated sensitivity measurement of the sensor was 6.52 m-1 s2. Sensitivity S is defined as (ΔR/R0)/a, where ΔR/R0 is the change in resistance, and a is the applied acceleration. This confirms the developed sensor’s ability to detect motion patterns in the low-frequency range, such as human motion.

Figure 3. Characteristics of the liquid metal-based inertial sensor. (a and b) Visualizing the LM-enabled variable resistance concept through controlling the intensity of the LED and the resistance change corresponding to the electrodes as a function of the LM droplet position. (c) Output of the cyclic rolling test of the LM-based inertial resistive sensor. (d) Comparison of the resistance changes of the inertial sensor output under random motion with the output of the reference accelerometer. (e) Outputs of the assembled two-axis sensor when acceleration is applied along the x and y directions, respectively. (f-h) Resistance change output of the inertial sensor under the action of acceleration along the x-axis as a function of varying acceleration frequency of 0.5-2 Hz. (i) Output resistance change with applied acceleration.
Strain sensors were fabricated using the serpentine-based resistive structure transferred to a PDMS substrate, allowing the porous LIG structure to experience strain during deformation, as illustrated in Figure 4a. This sensor was incorporated into the developed platform and placed in the chest area of the human body to monitor respiratory patterns caused by chest wall expansion during breathing. The changes in resistance are maximal during heavy breathing, significantly weakening once the subject stops breathing, as shown in Figure 4a. Heavy breathing results in a larger volume of lung expansion, which is associated with higher strain generated by the sensor when the chest wall expands. The flexible soft substrate used, PDMS, allows observable changes in resistance, reaching up to 2% in resistance value change. Figure 4b shows the output of cyclic strain testing under 6.5% strain applied to the strain sensor, with testing cycles exceeding 3000 cycles using a custom electric cycling device (as shown in Figure 4b (Movie S6)). ΔR/R0 remains stable during repeated stretching-releasing cycles, with changes being negligible.
This reproducible pattern in resistance change confirms that the conductive network of LIG is disrupted and restored to form conductive pathways, repeatedly proving its reproducibility and manufacturability as a respiratory pattern monitoring sensor. Commercial temperature/humidity sensors (Sensirion SHTW2) were used for electrical characterization and calibration of other epidermal sensors. The temperature sensor consists of sensitive resistive LIG material irradiated on PI film. From the characterization graphs, it can be seen that as the temperature linearly increases, the resistance value of the sensor decreases accordingly. This is the typical response of materials with a negative temperature coefficient (NTC) resistance, such as LIG, where increasing temperature leads to a decrease in resistivity. (44,43) The sensitivity of the temperature sensor was measured to be 215.2 mΩ°C-1, with a temperature range of 20 ~ 60°C. The capacitive response of the humidity sensor was captured in Figure 4d, when compared with the reference sensor used to associate the capacitive output of the sensor with relative humidity. Continuous respiratory cycles were performed on the humidity sensor, generating the capacitance values shown in Figure 4d. The increase in capacitance is due to the presence of moisture absorption sites in the multi-layer porous LIG sensing area. The presence of water molecules, along with increased humidity, alters the dielectric constant of LIG (εLIG), which correlates positively with the RH level and capacitance value. The interdigitated design provides a high surface-to-volume ratio and more absorption points, overall enhancing the sensor’s response. (45,46) The sensing platform is integrated with wireless PSoC; Figure 5a displays a block diagram of the internal components of the system for measuring and transmitting sensor outputs. The same laser template process was also used to combine the PSoC with traces for accelerometer, temperature, humidity, and strain sensors on a single thin polyimide substrate. As proof of the inertial sensor’s functional concept, the device was directly connected to the skin of a human subject while performing some physical activities, such as walking, jogging, lying down, and getting up. Figure 5b shows that the changes in the raw output due to walking lead to resistance change peaks in the range of 10%, while resistance change peaks of around 20% are observed during jogging, which is a more vigorous activity. It is important to note that inertial sensor 1 (as shown in the figure) is fixed horizontally on the motion axis, responding to the primary changes in resistance, while inertial sensor 2 shows minimal changes when subjected to low vibrations on its axis. On the other hand, when movements that change direction occur, such as lying down and standing up, significant output peaks can be observed from inertial sensor 2, as shown in Figure 5c. Based on these results, the application of the inertial sensor can be extended to monitor significant incidents such as falls, which is crucial for vulnerable populations, such as the elderly. Additionally, the demonstrated inertial sensing capabilities were used to continuously monitor the physical activity of a legged robot. Monitoring the motion of legged robots is essential for evaluating their program-driven movements and controlling their range of motion. Parts c and d of Figure 5 show the changes in the raw output resistance as a response to different actions performed by the legged robot, such as walking in place, moving forward, twisting, and performing minor actions. The developed inertial sensor can detect minor actions, such as nodding and twisting, as well as major actions, such as moving forward (Movie S7). This is due to the non-wetting characteristics of the LIG sensor towards the LM droplets and the high fluidity of the coated LM droplets, making it very sensitive to minor vibrations. Finally, the inertial sensor was mounted on a human arm to control the movement of a robotic arm in a real-time closed-loop feedback manner. Unlike strain-based flexible motion sensors, our developed sensor can be placed anywhere on the body, not limited to specific joints to induce resistance changes. For instance, two inertial sensors were fixed on a person’s arm. Through programming, the robotic arm can recognize two defined gestures from the inertial sensors shown in Figure 5f; moving the arm up/down drives the robotic arm to move up/down, while twisting the arm drives the robotic arm to approach and grasp the target object. Continuous images from this experiment are shown in Figure 5g (Movie S8).
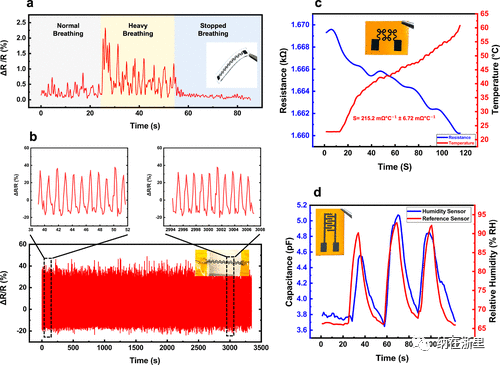
Figure 4. Multifunctional graphene-platform characterization. (a) Strain sensor attached to the skin of a human subject measuring real-time response to breathing patterns. (b) Output of the cyclic test response of the resistive strain sensor under 6.5% strain. (c) Characterization graph of the LIG temperature sensor resistance with changes in ambient temperature. (d) Characterization graph of the LIG humidity sensor capacitance with relative humidity (when exposed to alternating intervals of human breathing).
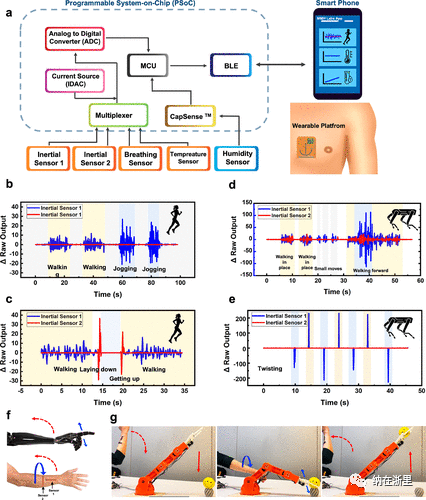
Figure 5. Platform system integration and applications. (a) Block diagram of the wearable multifunctional platform system integrating signal processing and real-time wireless transmission functions. (b and c) Real-time body activity monitoring, showing raw output changes in sensor resistance when connected to human subjects performing tasks such as standing still, walking, jogging, lying down, and getting up. (d and e) Real-time body activity monitoring, showing raw output changes in sensor resistance when connected to a legged robot performing actions such as walking in place, minor actions, moving forward, and twisting. (f) Application schematic of the developed inertial mode sensor in human-machine soft interfaces. (g) Timed delay photos of controlling a robotic arm using the developed inertial sensor.
Research Conclusion
In conclusion, we demonstrated the design, fabrication, and characterization of an independent soft integrated multifunctional graphene sensory platform for body activity monitoring, healthcare monitoring, and human-machine soft interfaces. This platform employs fully soft graphene-coated liquid metal-based inertial sensors, utilizing a 3D curved channel structure. The resistive inertial sensor exhibits a high sensitivity of 6.52% m-1 s2 while operating within an acceleration range of 1 ~ 30 m/s² and a low-frequency range of up to 0.167 Hz. This sensitivity is two orders of magnitude higher than those of recently reported printed resistive-based accelerometers and liquid metal-based accelerometers. (47,48) This ideal performance is achieved by utilizing high LM proof mass, enabled by coating its surface with laser-induced graphene particles, which allows for high mobility while maintaining high conductivity and mechanical stability. This property allows LM to act as a soft floating conductive proof mass confined within the hydrophobic PDMS channel, creating a vibrating space for the freely moving mass. The LM proof mass is coupled with interdigitated resistive LIG electrodes to measure the external motion applied to the sensor. After characterizing the sensor’s reliability, reproducibility, and manufacturability, the sensor was integrated with wireless PSoC circuitry for signal processing, wireless transmitter, and battery. The functionality of the sensor was demonstrated in three different applications, including monitoring human body and health activities, legged robot activities, and controlling robotic arms through human-machine interfaces. The entire platform employs emerging manufacturing technologies such as direct laser writing, 3D printing, and screen printing, providing a scalable manufacturing strategy independent of advanced microfabrication equipment, extending its applications to low-resource settings and environments. Future improvements to the platform include expanding the types of epidermal sensors incorporated into the platform to biochemical sensors, reflecting a more accurate and comprehensive state of body health for medical diagnosis and treatment. (49) Furthermore, there is a need to incorporate driving units, such as drug delivery devices, to realize a closed-loop interactive therapeutic platform. (3) An anticipated future task is to develop a battery-free compatible version of the platform, including energy harvesting units. (50,51) With improvements in manufacturing technology, miniaturization of the current platform will be necessary to enhance the overall performance of the sensing elements. Additionally, developing more complex sensor architectures beyond the curved channel will enable 3D multi-angle motion monitoring. Finally, integrating miniature machine learning algorithms and big data analytics into the platform will provide feedback in the form of motion pattern recognition and vital sign prediction patterns, offering deeper insights that can be used for personalized treatment and prevention.
References:Graphene and Liquid Metal Integrated Multifunctional Wearable Platform for Monitoring Motion and Human–Machine Interfacing.