Click the title below “Mechanical Coffee” to quickly follow
Article Overview
© Written by Internet

How is the “brain” of industrial robots—the controller—designed and implemented? This article provides deep insights!
Currently, there are mainly two approaches to the design and implementation of robot controllers in the market:
The first approach is to follow a completely self-developed route, where the entire process from hardware design to software module development is completed by the company’s own team. However, for most domestic robot companies, this completely self-developed route poses too much risk, as it not only requires strong financial support but also necessitates a well-trained team to tackle the core algorithms and some challenging issues in robot kinematics. Given the current R&D capabilities of domestic companies and their understanding of industrial robots, very few can achieve self-development. Even if some companies manage to develop their own core controllers after much effort, their functionality and performance still lag behind those of foreign manufacturers.
The second approach is to integrate and develop using third-party controllers. For example, customers can directly purchase robot controllers and teach pendants from companies like KEBA or B&R to design their own industrial robots. This method is characterized by relatively low R&D design risks and faster product release, but it lacks significant cost competitiveness since the core technologies primarily come from these controller suppliers.
So, is there a solution for designing and implementing robot controllers that has low development risk while also being cost-competitive? The answer is yes, and it comes from the industrial robot controller software solution provided by Phoenix Contact. Next, let’s take a look at the architecture and features of this robot controller software solution.
Solution
1. System Architecture
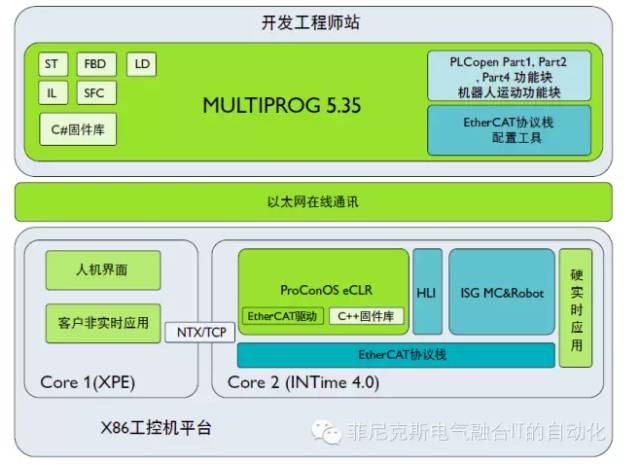
As shown in the figure below, the electrical software provides a high-performance robot motion control platform software based on IPC, including: real-time operating system, motion control core, and fieldbus technology, as well as an open PLC development software platform.
2. Features
High-performance IPC real-time motion control platform:
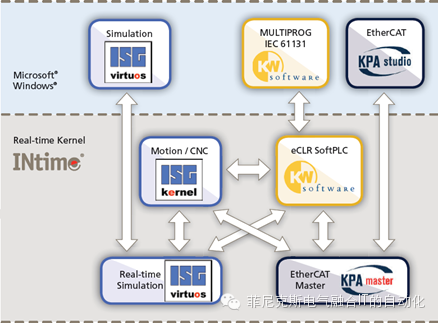
Based on the Windows real-time kernel INTime, the real-time stability is very high, and application program development and maintenance are very simple. INTime allows various robot system software to run on a stable and reliable open platform.
Using PLC programming languages to control robot motion:
Robot motion and logic control are implemented using the IEC61131-3 international programming standard, allowing programming in five languages: FBD, LD, ST, IL, and SFC. It supports algorithm function blocks that comply with the PLCopen Motion Control standard, providing customers with standard control methods for robot applications.
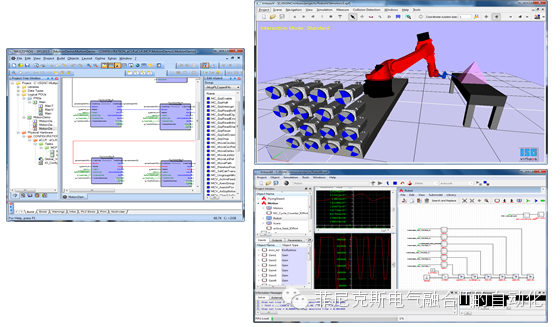
The robot’s motor axes and external auxiliary axes can be linked up to 16 axes, supporting online 3D simulation and debugging.
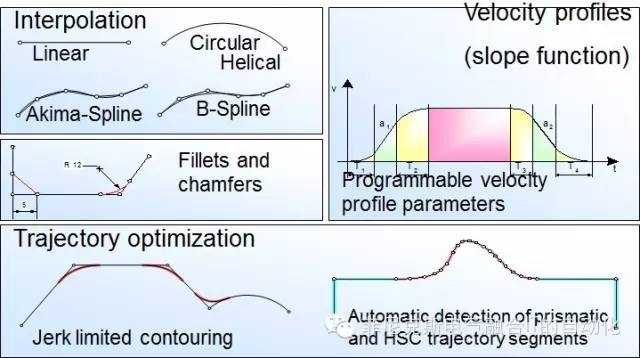
Robot motion and trajectory:
The core of robot motion control can support single-axis, electronic gear cam, and robot control, and it supports multi-channel architecture, allowing multiple robots to work simultaneously.
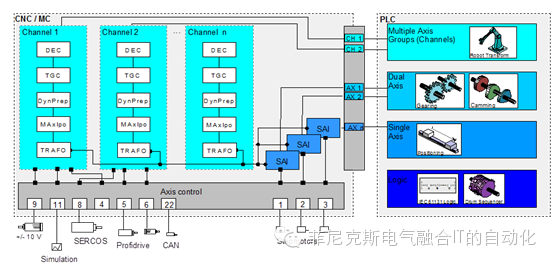
The motion control core supports different trajectory compensations, including linear, arc, and spline compensations. It supports S-curve velocity profiles and optimization between continuous trajectories.
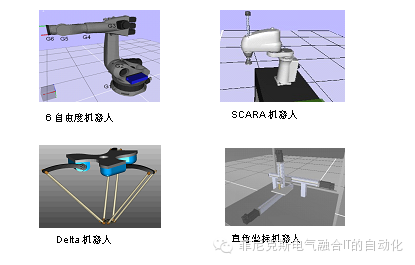
Robot kinematics support:
Currently, it supports commonly used robot structure kinematics templates, including 6 degrees of freedom robots, SCARA, Delta robots, and Cartesian robots.
Customers can develop custom kinematic models using C/C++:
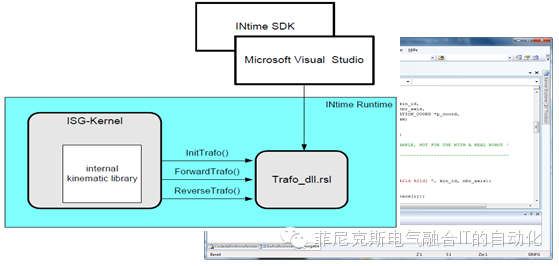
Core extensibility of the robot:
With the open software platform architecture of Windows & INTime dual systems, using INTime and PLC development toolkits, customers can extend the peripheral devices of the robot controller using C/C++ and PLC programming languages, such as teach pendants, vision modules, drive systems, and IO modules.

3. Conclusion
Phoenix Contact software provides the necessary open software platform for developing robot controllers. Customers can install the robot software package provided by Phoenix Contact on a standard IPC, and with high-performance, high-reliability software solutions, customers can quickly conduct secondary development, thus rapidly launching controller products suitable for various robot structures.